ВВЕДЕНИЕ
Сигналы встречаются почти в каждой области науки и техники, например в акустике, в биомедицинских исследованиях, в связи, в системах управления, в радиолокации, физике, сейсмологии и телеметрии. Различаются два общих класса сигналов: аналоговые (сигналы в непрерывном времени) и дискретные (сигналы в дискретном времени).
Аналоговым сигналом
называется сигнал, определенный для каждого момента времени. Типичными примерами аналоговых сигналов являются изменения во времени напряжения или скорости космического корабля.
Дискретным сигналом
называется сигнал, определенный только в дискретные моменты времени, например через каждую миллисекунду, каждую секунду или каждый день. Примерами такого типа сигналов являются цена какого-либо товара в момент закрытия фондовой биржи или количество осадков, выпавших за день, как функции времени.
Как дискретный, так и аналоговый сигналы могут быть однозначно представлены некоторыми функциями частоты, которые называются их частотными спектрами.
Эти функции описывают частотный состав сигнала.
Фильтрацией
называется процесс изменения частотного спектра сигнала в некотором желаемом направлении. Этот процесс может привести к усилению или ослаблению частотных составляющих в некотором диапазоне частот, к подавлению или выделению какой-нибудь конкретной частотной составляющей и т. п. Фильтрация нашла многочисленные применения, например для подавления шума, маскирующего сигнал, для устранения искажения сигнала, вызванного несовершенством канала передачи или погрешностями измерения, для разделения двух или более различных сигналов, которые были преднамеренно смешаны для того, чтобы в максимальной степени использовать канал, для разложения сигналов на частотные составляющие, для демодуляции сигналов, для преобразования дискретных сигналов в аналоговые, для ограничения полосы частот, занимаемой сигналами.
Цифровым фильтром
называется цифровая система, которую можно использовать для фильтрации дискретных сигналов. Он может быть реализован программным методом на ЦВМ или с помощью специальной аппаратуры, и в каждом из.этих случаев цифровой фильтр можно применить для фильтрации сигналов в реальном времени или для фильтрации предварительно записанных сигналов.
Реализованные программным методом цифровые фильтры появились вместе с первыми ЦВМ в конце 40-х годов, хотя самоназвание «цифровой фильтр» стало употребляться только в середине 60-х.
В электронике цифровой фильтр - это любой фильтр, обрабатывающий цифровой сигнал с целью выделения или подавления определённых частот сигнала. Цифровые фильтры на сегодняшний день применяются практически везде, где требуется обработка сигналов, в частности в спектральном анализе, обработке изображений, обработке видео, обработке речи и звука и многих других приложениях. Для большой точности и высокой скорости обработки сигналов требуется не только мощный процессор, но и дополнительное, возможно дорогостоящее, аппаратное обеспечение в виде высокоточных и быстрых ЦАП и АЦП. Различают два вида цифровых фильтров: Фильтр с конечной импульсной характеристикой - один из видов электронных фильтров, характерной особенностью которого является ограниченность по времени его импульсной характеристики. И фильтр с бесконечной импульсной характеристикой - электронный фильтр, использующий один или более своих выходов в качестве входа, то есть образует обратную связь. Цифровые фильтры являются обычным и неотъемлемым элементом бытовой электроники.
ЦИФРОВОЙ ФИЛЬТР КАК СИСТЕМА
Цифровой фильтр можно представить структурной схемой, изображенной на рис. 1 На этой схеме х(пТ)
и у(пТ)
—соответственно входное воздействие и реакция фильтра на это воздействие. Между реакцией и воздействием существует определенное соответствие, которое можно выразить соотношением у(пТ) =
R
х(пТ)
где R
—
оператор.
 рисунок 1. рисунок 1.
Как и другие системы обработки сигналов, цифровые фильтры могут быть стационарными или нестационарными, физически реализуемыми или нереализуемыми, линейными или нелинейными.
Стационарность.
Цифровой фильтр называется стационарным (инвариантным во времени), если его параметры не изменяются во времени. Это означает, что данное воздействие будет всегда приводить к одной и той же реакции независимо от времени приложения воздействия.
Формально предварительно невозбужденный фильтр, в котором х(пТ)=у(пТ)=0
при всех n<0, называется стационарным тогда и только тогда, когда Rx
(
nT
—
kT
)=
y
(
nT
—
kT
)
для всех возможных воздействий. Поведение стационарного фильтра иллюстрируется графиками на рис.2.
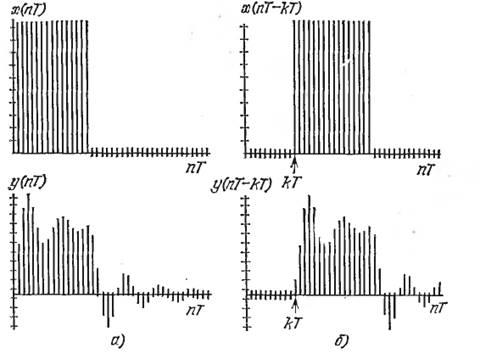
Рис. 1.
Стационарность:
а—реакция на воздействие х(пТ); б
— реакция на задержанное .воздействие х(пТ
—kT
)
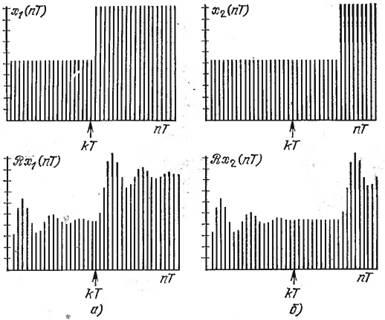
Физическая реализуемость.
Физически реализуемым называется фильтр, у которого реакция в данный момент времени не зависит от значений воздействия в последующие моменты. Точнее, цифровой фильтр физически реализуем тогда и только тогда, когда R (nT) = R (nT) = R (nT) при n<k для всех возможных пар воздействий (nT) при n<k для всех возможных пар воздействий  , удовлетворяющих условиям , удовлетворяющих условиям

Этот критерий изображен на рисунке 2.

МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ ЦИФРОВЫХ ФИЛЬТРОВ.
Аналоговые фильтры математически описываются дифференциальными уравнениями. Цифровые же фильтры можно описать разностными уравнениями. При этом различаются два типа цифровых фильтров — нерекурсивные и рекурсивные.
Нерекурсивные фильтры.
Реакция нерекурсивного фильтра в момент времени пТ
имеет вид

Если предположить линейность и стационарность фильтра, то у(пТ)
можно записать в виде

где  — постоянные. Предполагая, что фильтр физически реализуем и применяя определенный выше критерий физической реализуемости, можно показать, что — постоянные. Предполагая, что фильтр физически реализуем и применяя определенный выше критерий физической реализуемости, можно показать, что  и поэтому и поэтому   Если к тому же Если к тому же  то то
 (1) (1)
Таким образом, при выполнении указанного условия линейный стационарный физически реализуемый нерекурсивный фильтр может быть представлен линейным разностным уравнением N-гопорядка. Число N
называется порядком
фильтра.
Рекурсивные фильтры.
Реакция рекурсивного фильтра в некоторый момент времени зависит как от входного воздействия, так и
от значений реакции в другие моменты времени и для линейного стационарного физически реализуемого фильтра имеет вид
 (2) (2)
т. е. у(nТ) зависит от N предшествующих значений воздействия и реакции. Заметим, что если  уравнение (2) переходит в (1), т. е. нерекурсивный фильтр представляет собой частный случай рекурсивного. уравнение (2) переходит в (1), т. е. нерекурсивный фильтр представляет собой частный случай рекурсивного.
СХЕМЫ ЦИФРОВЫХ ФИЛЬТРОВ.
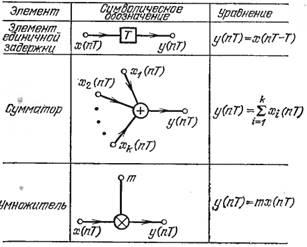
Основными элементами цифрового фильтра являются элементы задержки на один такт Т
(элементы единичной задержки), сумматор и умножитель. Их характеристики и обозначения даны в табл. 1.1.
Реализация этих элементов может быть различна в зависимости от представления обрабатываемых сигналов. Если сигналы имеют вид последовательностей двоичных чисел, то устройство задержки может быть реализовано в виде регистра сдвига, а сумматор и умножитель — в виде комбинационных или последовательностных схем, содержащих ключевые схемы вида НЕ—И или НЕ—ИЛИ.
Схемы цифровых фильтров представляются в виде множества элементов единичной задержки, сумматоров и умножителей, соединенных между собой. Анализ этих схем обычно несложен и его можно осуществить, используя уравнения элементов, приведенные в табл. 1.1.
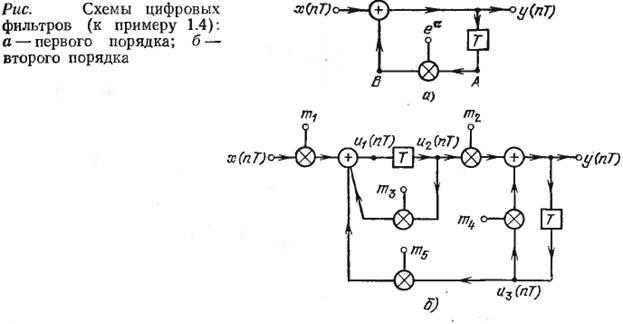

Очевидно, что анализ схемы цифрового фильтра заключается в решении системы уравнений, которе можно осуществить методами теории сигнальных направлений графов (2,3).
Заключение.
Цифровые фильтры на сегодняшний день применяются практически везде, где требуется обработка сигналов, в частности в спектральном анализе, обработке изображений, обработке видео, обработке речи и звука и многих других приложениях.
Преимуществами цифровых фильтров перед аналоговыми являются:
· Высокая точность (точность аналоговых фильтров ограничена допусками на элементы).
· В отличие от аналогового фильтра передаточная функция не зависит от дрейфа характеристик элементов.
· Гибкость настройки, лёгкость изменения.
· компактность — аналоговый фильтр на очень низкую частоту (доли герца, например) потребовал бы чрезвычайно громоздких конденсаторов или индуктивностей.
Недостатками цифровых фильтров по сравнению с аналоговыми являются:
· Трудность работы с высокочастотными сигналами. Полоса частот ограничена частотой Найквиста, равной половине частоты дискретизации сигнала. Поэтому для высокочастотных сигналов применяют аналоговые фильтры, либо, если на высоких частотах нет полезного сигнала, сначала подавляют высокочастотные составляющие с помощью аналогового фильтра, затем обрабатывают сигнал цифровым фильтром.
· Трудность работы в реальном времени — вычисления должны быть завершены в течение периода дискретизации.
· Для большой точности и высокой скорости обработки сигналов требуется не только мощный процессор, но и дополнительное, возможно дорогостоящее, аппаратное обеспечение в виде высокоточных и быстрых ЦАП и АЦП.\
· Основным недостатком цифровых фильтров, выполненных аппаратурно, является их относительно высокая стоимость.
Список использованной литературы:
| 1 |
Название: Цифровые фильтры
Автор: Р. В. Хемминг
Издательство: Советское радио
Год издания: 1980
|
| 2 |
Название: Цифровые фильтры: анализ и проектирование
Автор: Антонью А.
Издательство: Радио и связь
Год: 1983
|
| 3 |
Название: Аналоговые и цифровые фильтры. Расчет и реализация
Автор: Гарри Лэм
Издательство: Мир
Год издания: 1982
|
| 4 |
Свободная интернет-энциклопедия «Википедия»
http://ru.wikipedia.org/wiki/Цифровой_фильтр
|
|