Розробка hdl-моделі та комп’ютерне моделювання паралельного логічного контролера циклічної дії
HDL-модель паралельного логічного контролера циклічної дії реалізовано мовою опису апаратури AHDL у середовищі MAXplus+II (проект - cyclomat_canon). Для наочності файл верхнього рівня ієрархії реалізований у графічному редакторі (рис.1).
Алгоритм функціонування паралельного логічного контролера циклічної дії описується таблицями станів та переходів (табл 1,2).
Таблиця 1. Таблиця станів (мікроциклів)
Найменування технологічної операції та групи операцій (мікроциклів)
Z
|
№ кроку в мікроциклі
W
|
Команди керування
C
|
Очікуваний стан вхідних сигналів
B
|
Сигнал закінчення
мікроциклу
ENDmс
|
| 0 |
Операція 0.0. |
0 |
0 |
0 |
0 |
| Операція0.1. |
1 |
1 |
1 |
0 |
| Операція0.2. |
2 |
1 |
0 |
1 |
| 1 |
Операція 1.0. |
0 |
10 |
10 |
0 |
| Операція1.1 |
1 |
11 |
11 |
0 |
| Операція1.2 |
2 |
12 |
12 |
0 |
| Операція1.3 |
3 |
0 |
0 |
1 |
| 2 |
Операція2.0. |
0 |
20 |
20 |
0 |
| Операція2.1 |
1 |
21 |
21 |
0 |
| Операція2.2 |
2 |
22 |
22 |
0 |
| Операція2.3 |
3 |
22 |
0 |
1 |
Таблиця 2. Таблиця переходів між станами (мікроциклами)
Номер поточного стану (мікроциклу)
Zp
|
Вхідний стан
A
|
Контроль сигналу закінчення мікроциклу
ENDмс
|
Наступний стан (мікроцикл)
Zk
|
| 0 |
1 |
1 |
1 |
| 1 |
2 |
1 |
2 |
| 2 |
3 |
1 |
1 |
| 2 |
4 |
х |
0 |
Блок пам'яті bp
цикломата являє собою параметричний модуль, що забезпечує:
багаторазову перевірку правильності прийняття керуючих рішень, причому час між перевірками задається параметром period1
;
період, після якого забезпечується скидання (обнуління) блоку пам'яті при відсутності стабільності інформації на вході блоку пам'яті задається параметром period2
;
кількість дискретних входів задається параметром width
.
Параметри c
1_width
та c
2_width
необхідні для завдання розрядності лічильників, що забезпечують реалізацію функції виміру часових параметрів.
Логічна структура блоку пам'яті bp
(див. рис.2) містить наступні функціональні вузли:
тактовий генератор ТГ,
лічильник С1, призначений для формування сигналу Е, що являє собою імпульс із тривалістю в один такт сигналу синхронізації С и формується періодично з інтервалом часу t'
,
лічильник С2, що забезпечує підрахунок кількості виконаних перевірок правильності реалізації логічних функцій ω,
лічильник С3, що забезпечує скид регістра RG2, якщо на виході Q лічильника С2 протягом заданого інтервалу часу не формується сигнал логічної 1,N"
-розрядні регістри пам'яті RG1 і RG2,N"
-розрядна схема порівняння.
 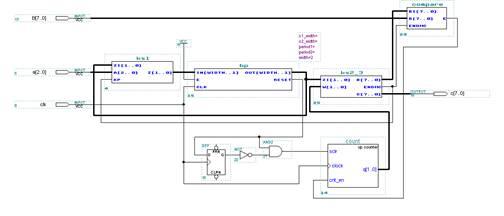
Рис.1. Файл верхнього рівня ієрархії в графічному редакторі
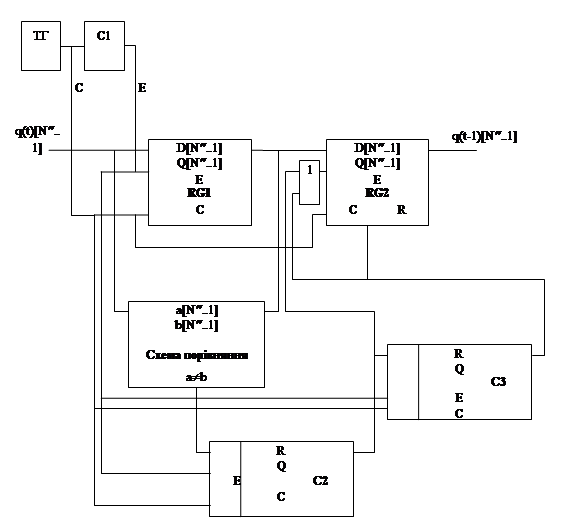
Рис.2. Логічна структура блоку пам’яті bp
Блок пам'яті bp
працює таким чином. Вхідні сигнали q (t) [N".
.1] надходять на входи регістра RG1 D [N".
.1] і схеми порівняння а [N".
.1].
На виходах регістра RG1 формуються сигнали Q [N".
.1], що надходять на входи регістра RG2 D [N".
.1] і схеми порівняння b [N".
.1].
У випадку зміни стану вхідних сигналів q (t) [N".
.1] сигнали на входах а [N".
.1] і b [N".
.1] схеми порівняння стають нееквівалентними, у результаті чого на виході a¹b схеми порівняння формується сигнал логічної 1, що надходить на вхід R лічильника С2 і забезпечує його скид.
При надходженні чергового імпульсу Е на вхід Е регістра RG1 виконується запис інформації, що надходить на його входи D [N".
.1]. У результаті цього сигнали на входах а [N".
.1] і b [N".
.1] схеми порівняння стають еквівалентними і вихідний сигнал схеми порівняння a¹b приймає значення логічного 0.
Далі лічильник С2 здійснює підрахунок імпульсів Е, що надходять на його вхід Е з виходу лічильника С1.
У випадку, якщо лічильник С2 дорахує до заданого значення n (що означає успішне виконання n-кратної перевірки), на його виході Q буде сформований сигнал логічної 1, що надходить на вхід Е регістра RG2, забезпечуючи таким чином запис інформації і формування сигналів q (t-1) [N".
.1] на виході блоку пам'яті.
Якщо наступна зміна вхідних сигналів q (t) [N".
.1] відбудеться до того, як лічильник С2 дорахує до n, лічильник С2 знову буде обнулений і підрахунок імпульсів Е буде виконуватись спочатку.
Структурна схема HDL-моделі блоку пам’яті bp
приведена на рис.3. Результати моделювання компонентів bp_rg, bp_compare, bp_counter приведені на рис 4 - 6.
Результати моделювання блоку пам’яті bp
наведені на рис.7.
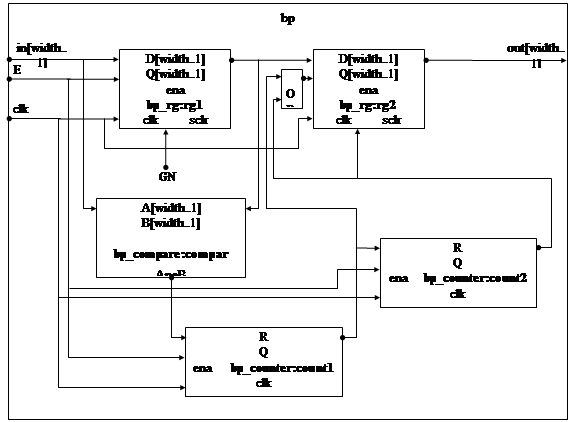
Рис.3. Структурна схема HDL-моделі блока пам’яті bp
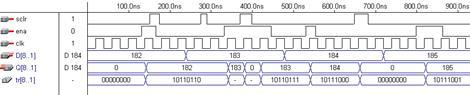
Рис.4. Результати моделювання компонента bp_rg

Рис.5. Результати моделювання компонента bp_compare
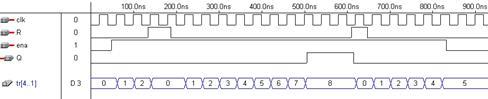
Рис.6. Результати моделювання компонента bp_ counter

Рис.7. Результати моделювання блоку пам’яті bp
Комбінаційна схема KS1 реалізує логічну функцію λ відповідно до таблиці переходів, наведеної на рис.2.
Опис функції λ с використанням конструкцій CASE і IF THEN виглядає так:
CASE zi [] IS
WHEN 0 =>
IF a [] == 1 and kp then z [] = 1;
ELSE z [] = 0;
END IF;
WHEN 1 =>
IF a [] == 2 and kp then z [] = 2;
ELSE z [] = 1;
END IF;
WHEN 2 =>
IF a [] == 3 and kp then z [] = 1;
ELSIF a [] == 4 then z [] = 0;
ELSE z [] = 2;
END IF;
END CASE;
Для опису функцій χ, δ, δ' у блоці RS2_3 використана конструкція TABLE:
TABLE zi [1. .0], w [1. .0] => b [7. .0], ENDmc, c [7. .0] ;
0, 0 => 0, 0, 0;
0, 1 => 1, 0, 1;
0, 2 => 0, 1, 1;
1, 0 => 10, 0, 10;
1, 1 => 11, 0, 11;
1, 2 => 12, 0, 12;
1, 3 => 0, 1, 0;
2, 0 => 20, 0, 20;
2, 1 => 21, 0, 21;
2, 2 => 22, 0, 22;
2, 3 => 0, 1, 22;
END TABLE;
Схема скидання лічильника count
виконана з використанням примітивів DFF, NOT, AND2, які виділяють передній фронт сигналу на виході reset
блоку пам'яті шляхом формування імпульсу тривалістю в один такт сигналу синхронізації.
Фрагмент результатів моделювання паралельного логічного контролера циклічної дії наведено на рис.8.
 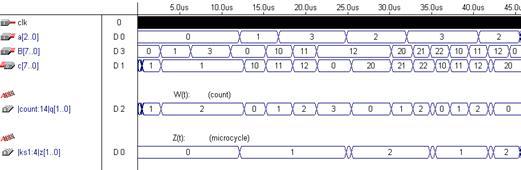
Рис.8. Фрагмент результатів моделювання паралельного логічного контролера циклічної дії
|