ВВЕДЕНИЕ
Исполнительные устройства состоят из исполнительного механизма и регулирующего органа. Исполнительный механизм осуществляет перемещение регулирующего органа в соответствии с сигналами, поступающими от регулятора или управляющего устройства. В зависимости от вида используемой энергии различают электрические, пневматические, гидравлические и комбинированные (электрогидравлические, электропневматические) исполнительные механизмы.
1. ЭЛЕКТРИЧЕСКИЕ ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ
Они работают в комплекте с электрическими регуляторами и подразделяются на электродвигательные и электромагнитные (соленоидные).
Электродвигательные исполнительные механизмы. Они делятся на многооборотные и однооборотные и состоят из электродвигателя, понижающего механического редуктора, узлов блокировки и дистанционной передачи сигнала положения регулирующего органа.
Схема дистанционного управления исполнительным механизмом включает кнопки дистанционного управления КО
и КЗ
, которыми отключаются и включаются обмотки катушек МП1
и МП2
реверсивного магнитного пускателя.
Для блокировки кнопок и электродвигателя служат контакты МП1-1
и МП2-1
. Отключение электродвигателя в крайних положениях «Открыто» и «Закрыто» осуществляется кольцевыми выключателями с контактами КВ1
и КВ2
. Кнопка КС
предназначена для остановки регулирующего органа в промежуточном положении в случае ложного срабатывания электродвигателя. Сигнализация крайних положений регулирующего органа осуществляется лампами Л1
и Л2
. При движении регулирующего органа обе лампочки горят.
Для защиты электродвигателя от перегрузок в промежуточном и закрытом положениях регулирующего органа на исполнительном механизме устанавливают муфту крутящего момента с отключающим контактом КМ
. Контакты МП 1-2
и МП 2-2
служат для включения электродвигателя исполнительного механизма.
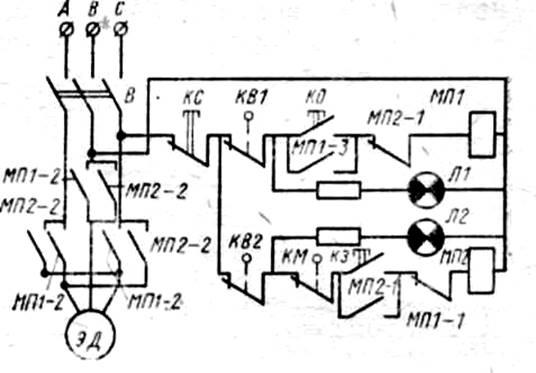
1.1 Схема дистанционного управления исполнительным механизмом
Выключателем В
схема подключается к сети трехфазного тока. При нажатии кнопки КО
электрический ток проходит через катушку магнитного пускателя МП1
, которая, втягивая якорь, замыкает контакты МП1-3
и размыкает контакты блокировки МП1-1
, электродвигатель ЭД
открывает регулирующий орган (клапан).
При полностью открытом клапане срабатывает концевой выключатель и размыкает контакт КВ1
, отключая МП1
и лампочку Л
, электродвигатель ЭД
останавливается. При нажатии кнопки КЗ
электрический ток проходит через катушку МП2
, которая втягивает якорь и замыкает контакты МП2
и размыкает контакты блокировки МП2-1
. Электродвигатель ЭД
закрывает клапан. В случае перегрузки электрическая цепь питания катушки МП2
размыкается отключающим контактом КМ
, а при полностью закрытом клапане катушку МП2
отключает концевой выключатель контактами КВ2
, лампочка Л2
гаснет.
Однооборотные исполнительные механизмы, имеющие угол поворота от 15 до 360°, выпускаются с контактным или бесконтактным управлением. Контактное управление осуществляется с помощью релейных схем и ограничивает длительность работы исполнительного механизма. Бесконтактное управление обеспечивает работу исполнительного механизма в любом режиме, независимо от длительности и частоты включения.
2. ЭЛЕКТРОМАГНИТНЫЕ ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ.
Они работают в схемах двухпозиционного регулирования и дистанционного управления, широко используются при автоматизации холодильных установок в качестве электромагнитных вентилей прямого действия с диаметром условного прохода не более 10 мм и непрямого действия с диаметром условного прохода 25—65 мм. Они состоят из электромагнита (соленоида) с возвратной пружиной, якорь которого управляет открытием и закрытием регулирующего органа.
Тяговое усилие, развиваемое электромагнитом соленоида, определяют по изменению энергии магнитной системы во время движения якоря.
Для увеличения тягового усилия необходимо увеличить сечение магнитопровода или число витков в обмотке электромагнита.
Электромагнитный исполнительный механизм с регулирующим органом называют электромагнитным вентилем. По конструкции электромагнитные вентили бывают прямого и непрямого действия. В электромагнитном вентиле прямого действия (рис. 1.2, а) при подаче напряжения Un питания в обмотку электромагнита якорь втягивается, открывая клапан. Нормальная работа при открытии клапана обеспечивается.
В электромагнитном вентиле непрямого действия (рис. 1.2 ,б) электромагнитом открывается вспомогательный клапан.

a) б)
1.1 Схемы электромагнитных вентилей:
а — прямого действия; б — непрямого действия;
1 — якорь;
2 — электромагнитная катушка;
3 — корпус;
4 — основной клапан;
5 — вспомогательный клапан;
6 —канал подвода среды к вспомогательному клапану;
7 — седло клапана;
8 — калибровочное отверстие;
9 — пружина;
10 — мембрана.
При отсутствии напряжения якорь под действием собственного веса опущен вниз и закрывает вспомогательный клапан. Основной клапан закрыт под действием пружины. При этом давление над мембраной равно входному, что обеспечивается калиброванным отверстием в основном клапане. При подаче напряжения якорь втягивается в катушку, открывая вспомогательный клапан, и надмембранная полость через него соединяется с выходом.
Под действием силы при открытом вспомогательном клапане основной клапан открывается. При снятии напряжения Un основной клапан закрывается.
3. ПНЕВМАТИЧЕСКИЕИГИДРАВЛИЧЕСКИЕ ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ.
Они подразделяются на поршневые и мембранные.

3.1 Пневматические (гидравлические) исполнительные механизмы:
а — поршневой: 1 — цилиндр; 2 — поршень; 3 — уплотнительные кольца; 4 — шток; 5 — возвратная пружина- 6 — крышки; 7 — уплотнения; 8 — шпильки; 9 — полость;
б — мембранный: 7 —фланцы; 2 —мембрана; 3 — возвратная пружина; 4 — шток; 5 — втулка с натяжной гайкой.
Поршневые в отличие от мембранных применяются при больших перемещениях регулирующего органа.
Поршневой исполнительный механизм.
Он состоит из цилиндра, поршня с уплотнительными кольцами и штоком, возвратной пружины и крышек с уплотнениями, стянутыми шпильками (рис. 3.1, а). Исполнительный механизм, не имеющий возвратной пружины, где возврат поршня в исходное положение осуществляется подачей среды в противоположную полость называется двуходовым.
Мембранный исполнительный механизм.
Он состоит из фланцев, мембраны, возвратной пружины, штока и натяжной гайки со втулкой (рис. 3.1, 6). При подаче давления в надмембранную полость мембрана прогибается, перемещая шток вниз, возврат штока в исходное положение осуществляется под действием пружины.
Исполнительные механизмы постоянно совершенствуются на основе использования новых высокопрочных материалов, современной технологии изготовления отдельных элементов, в результате уменьшаются их масса, габариты и повышается надежность.
Регулирующие органы исполнительных устройств. Регулирующий орган предназначен для изменения расхода среды, энергии или каких-либо других параметров, обеспечивающих заданный режим работы объекта.
Наиболее широко в технологических процессах используют дроссельные регулирующие органы, которые управляют расходом среды путем изменения диаметра проходного сечения. К ним относятся регулирующие клапаны, заслонки и шиберы.
Условная пропускная способность жидкости в кубических метрах в час при максимальном (условном) ходе затвора, который определяется типом регулирующего органа и диаметром присоединительных патрубков (условный проход). Зависимость пропускной способности регулирующего органа от перемещения затвора при постоянном перепаде давлений называется пропускной характеристикой. В процессе работы перепад давлений на клапане меняется.
Регулирующие клапаны. Они предназначены для регулирования расхода жидких пищевых продуктов, воды, пара, газа. Регулирующие клапаны выпускаются серийно. В зависимости от диаметра условного прохода и перепада давления на клапане используют одно- или двухседель-ные клапаны.
Односедельные клапаны требуют более мощный исполнительный механизм, так как на шток воздействует сила давления среды.
В двухседельном клапане сила, развиваемая исполнительным механизмом, затрачивается только на перемещение регулирующего органа, независимо от давления и скорости протекания регулируемой среды. Однако они менее герметичны, чем односедельные.
Основным требованием к регулирующему клапану является соответствие его пропускной характеристики расчетному значению расхода регулируемой среды. Правильно подобранным считается такой клапан, при открытии которого на 40—60% обеспечивается предусмотренный проектом номинальный расход среды. При открытии клапана от 15 до 85% он должен обеспечить расход среды во всем диапазоне от минимального до максимального значения. Если выбрать клапан с максимальной пропускной способностью значительно больше номинального расхода среды, то даже небольшое перемещение клапана приведет к резким изменениям расхода, не соответствующим величине управляющего сигнала. Например, согласно управляющему сигналу регулятора исполнительный механизм перемещает регулирующий клапан. При этом через правильно подобранный клапан расход среды соответственно изменится. При неправильно выбранном клапане это условие соблюдено не будет. В этом случае даже при высокой точности работы регулятора невозможно обеспечить устойчивый режим управления, что не позволит воздействовать на процесс посредством увеличения расхода среды как в автоматическом, так и ручном режиме управления.
Регулирующий орган характеризуется коэффициентом передачи, который зависит от положения клапана (расхода среды).
Система регулирования работает устойчиво. Поскольку на коэффициент передачи аппарата воздействовать сложно, т. к. его величина определяется нерегулируемыми параметрами (загрузка аппарата и т. д.). Чтобы при разных расходах среды коэффициент передачи регулирующего органа также был постоянным.
Регулирующие органы имеют линейные или равнопроцентные пропускные характеристики. Из этого можно сделать вывод, что при уменьшении давления среды в трубопроводе коэффициент передачи регулирующего органа существенно меняется и практически остается постоянным при равнопроцентной пропускной характеристике. Таким образом, если в системе автоматического регулирования основными являются внешние возмущения (изменение загрузки аппарата и пр.), то необходимо использовать регулирующий орган с линейной пропускной характеристикой, если же основные возмущения поступают по каналу регулирования, то следует применять регулирующий орган с равнопроцентной пропускной характеристикой. Расходные и пропускные характеристики регулирующих органов приводятся в их паспортных данных, а также в специальной литературе.
Регулирование расходов воздуха и газов при небольших статических давлениях, например, в системах вентиляции и кондиционирования воздуха осуществляют с помощью шиберов или заслонок.
При подборе шиберов кроме пропускной характеристики определяют силу, под действием которой происходит его перемещение.
Регулирующее воздействие, вырабатываемое системой автоматического управления, должно передаваться на регулирующий орган с минимальным искажением, поэтому выходной элемент исполнительного механизма и входной элемент регулирующего органа должны быть соединены соответствующим образом. Способы их сочленения зависят от конструкций исполнительного механизма и регулирующего органа, а также условий их работы. Сочленение бывает непосредственным, жестким или тросовым. Непосредственное сочленение штока исполнительного механизма со штоком регулирующего органа широко применяется во всех исполнительных устройствах. Жесткое соединение осуществляется с помощью рычагов; оно позволяет менять масштаб перемещения регулирующего органа относительно хода исполнительного механизма.
Тросовое соединение используется при больших расстояниях между исполнительным механизмом и регулирующим органом.
Министерство образования и науки Российской Федерации
«Северо-Кавказский государственный технический университет»
РЕФЕРАТ
По дисциплине: Управление техническими системами.
Тема: Исполнительные механизмы.
Выполнил: студент 4-го курса гр.МАП-051
Бондарь Д. В.
Проверил: Ларионов Ю. А.
Ставрополь 2009 г.
СОДЕРЖАНИЕ
Введение 3
1. Электрические исполнительные механизмы 4
2. Электромагнитные исполнительные механизмы 7
3. Пневматические и гидравлические исполнительные механизмы 9
|