7. Последовательные правила различения
сложных гипотез.
7.1. Общие положения.
Как уже упоминалось, одно из условий, при которых доказана теорема Вальда-Вольфовитца об оптимальности вальдовской процедуры, состоит в том, что различаемые гипотезы являются простыми
, т.е. выборочные распределения, соответствующие гипотезам  и и  полностью известны. Для представляющего основной практический интерес случая различения сложных гипотез общие принципы построения оптимальных последовательных процедур остаются теми же, что и при фиксированном объеме выборки. Однако необходимо учитывать ряд особенностей, порождаемых случайным объемом выборки последовательной процедуры. Проиллюстрируем сказанное двумя наглядными примерами. полностью известны. Для представляющего основной практический интерес случая различения сложных гипотез общие принципы построения оптимальных последовательных процедур остаются теми же, что и при фиксированном объеме выборки. Однако необходимо учитывать ряд особенностей, порождаемых случайным объемом выборки последовательной процедуры. Проиллюстрируем сказанное двумя наглядными примерами.
7.2 Сигнал с неизвестным энергетическим параметром.
До сих пор мы предполагали, что если справедлива гипотеза , т.е. сигнал присутствует, то его амплитуда  совпадает с расчетным значением совпадает с расчетным значением  , которому соответствует распределение , которому соответствует распределение  . На практике амплитуда сигнала может отличаться от расчетной (быть как меньше, так и больше последней). В терминах теории статистических решений эта ситуация означает, что простой
гипотезе . На практике амплитуда сигнала может отличаться от расчетной (быть как меньше, так и больше последней). В терминах теории статистических решений эта ситуация означает, что простой
гипотезе  противопоставляется односторонняя
альтернатива: противопоставляется односторонняя
альтернатива:  . .
Естественный подход к задаче различения таких гипотез в классе правил с фиксированным объемом выборки состоит в том, что обнаружитель рассчитывается на некоторое минимальное значение расчетного сигнала  , для которого при заданном объеме выборки , для которого при заданном объеме выборки  вероятность пропуска вероятность пропуска  не превышает допустимой. Вероятность обнаружения сигналов с параметром , отличающимся от расчетного, определяется характеристикой обнаружения не превышает допустимой. Вероятность обнаружения сигналов с параметром , отличающимся от расчетного, определяется характеристикой обнаружения  (см. раздел 5). (см. раздел 5).
Аналогичный подход возможен и при последовательном анализе; характеристика обнаружения такой процедуры приведена на рис.7.1, там же изображены зависимости математического ожидания и дисперсии длительности последовательной процедуры от отношения  . Отличительной особенностью этих зависимостей является характерный максимум, наблюдаемый при некотором . Отличительной особенностью этих зависимостей является характерный максимум, наблюдаемый при некотором  . .
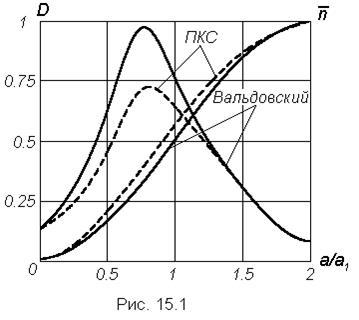 |
Описанный эффект нарастания математического ожидания и дисперсии длительности последовательной процедуры часто называют “резонансом
длительности
”. В случае симметричных порогов резонанс длительности наступает при равенстве нулю среднего приращения решающей статистики  , когда решающая статистика совершает случайные блуждания между порогами, не имея регулярного “сноса” ни к одному из них. При несимметричных порогах резонанс наступает при наличии некоторого “сноса” в сторону более удаленного порога. Необходимо подчеркнуть, что и в точке резонанса длительность последовательной процедуры остается конечной
, (ее мат. ожидание в этом случае определяется не формулой (7.4), а зависит от дисперсии решающей статистики). Следует также отметить, что в большинстве случаев последовательное решающее правило при всех значениях , когда решающая статистика совершает случайные блуждания между порогами, не имея регулярного “сноса” ни к одному из них. При несимметричных порогах резонанс наступает при наличии некоторого “сноса” в сторону более удаленного порога. Необходимо подчеркнуть, что и в точке резонанса длительность последовательной процедуры остается конечной
, (ее мат. ожидание в этом случае определяется не формулой (7.4), а зависит от дисперсии решающей статистики). Следует также отметить, что в большинстве случаев последовательное решающее правило при всех значениях  требует среднего объема выборки, не превышающего объема выборки правила Неймана-Пирсона, обеспечивающего ту же вероятность правильного обнаружения требует среднего объема выборки, не превышающего объема выборки правила Неймана-Пирсона, обеспечивающего ту же вероятность правильного обнаружения  . .
Тем не менее, с точки зрения практики эффект резонанса длительности последовательной процедуры, связанный с неоптимальностью вальдовского решающего правила при всех значениях параметра , не совпадающих с расчетными значениями  и и  , нежелателен. Ниже будут рассмотрены методы уменьшения этого эффекта. , нежелателен. Ниже будут рассмотрены методы уменьшения этого эффекта.
7.3. Многоканальная последовательная процедура с независимыми решениями.
Пусть в некоторой области пространства параметров решается задача проверки простой гипотезы об отсутствии в ней сигналов против сложной альтернативы о наличии  сигналов, при этом решение в пользу должно сопровождаться оценкой числа сигналов и неизвестного параметра каждого из них, т.е. система должна обладать разрешающей
способностью
по этим параметрам. Из двух возможных вариантов построения схемы совместного обнаружения -оценивания – многоканальной и следящей (самонастраивающейся) рассмотрим только первый вариант. (Следящие схемы, обеспечивающие обнаружение и разрешение нескольких одновременно наблюдаемых сигналов оказываются весьма сложными ). Типичным примером такой ситуации является обнаружение в РЛС с разрешением по дальности или ( сигналов, при этом решение в пользу должно сопровождаться оценкой числа сигналов и неизвестного параметра каждого из них, т.е. система должна обладать разрешающей
способностью
по этим параметрам. Из двух возможных вариантов построения схемы совместного обнаружения -оценивания – многоканальной и следящей (самонастраивающейся) рассмотрим только первый вариант. (Следящие схемы, обеспечивающие обнаружение и разрешение нескольких одновременно наблюдаемых сигналов оказываются весьма сложными ). Типичным примером такой ситуации является обнаружение в РЛС с разрешением по дальности или ( ) доплеровской скорости. Проверка гипотез о наличии или отсутствии цели при этом проводится параллельно
во всех элементах разрешения (каналах), принадлежащих одному угловому направлению и наблюдение должно продолжаться до тех пор, пока не будет принято решение относительно каждого из них. За оценки неизвестных параметров в первом приближении могут быть приняты номера каналов ) доплеровской скорости. Проверка гипотез о наличии или отсутствии цели при этом проводится параллельно
во всех элементах разрешения (каналах), принадлежащих одному угловому направлению и наблюдение должно продолжаться до тех пор, пока не будет принято решение относительно каждого из них. За оценки неизвестных параметров в первом приближении могут быть приняты номера каналов  в которых принято решение о наличии целей. в которых принято решение о наличии целей.
В рамках правил с фиксированным объемом выборки для решения поставленной задачи вполне обоснованно применяется так называемое правило
с
независимыми
решениями
. Согласно этому правилу, решение в каждом канале принимается на основании сравнения накопленного в нем за шагов парциального отношения правдоподобия  (или его логарифма (или его логарифма  ) с решающим порогом ) с решающим порогом  ; при ; при  в соответствующем канале принимается гипотеза , в противном случае - . Как было показано (см. раздел 4;5) вероятность ложной тревоги на выходе такой системы в соответствующем канале принимается гипотеза , в противном случае - . Как было показано (см. раздел 4;5) вероятность ложной тревоги на выходе такой системы  . Для того, чтобы поддерживать . Для того, чтобы поддерживать  на фиксированном уровне, при увеличении числа каналов необходимо обратно пропорционально на фиксированном уровне, при увеличении числа каналов необходимо обратно пропорционально  уменьшать величину уменьшать величину  , что эквивалентно увеличению решающего порога примерно пропорционально , что эквивалентно увеличению решающего порога примерно пропорционально  .Одновременно, для поддержания постоянства вероятности пропуска также пропорционально должен увеличиваться объем решающей выборки , что совпадает с размером неизбежной “платы” за априорную неопределенность, присущей оптимальным правилам (см. раздел 4). Таким образом, при фиксированном
объеме выборки правило с независимыми решениями оказывается достаточно близким к оптимальному. .Одновременно, для поддержания постоянства вероятности пропуска также пропорционально должен увеличиваться объем решающей выборки , что совпадает с размером неизбежной “платы” за априорную неопределенность, присущей оптимальным правилам (см. раздел 4). Таким образом, при фиксированном
объеме выборки правило с независимыми решениями оказывается достаточно близким к оптимальному.
Предположим теперь, что момент завершения процедуры в каждом канале не фиксируется заранее, а определяется вальдовским последовательным правилом (6.1). Очевидно, что необходимость увеличения верхнего решающего порога последовательной процедуры  для поддержания фиксированной частоты ложных тревог на выходе многоканального обнаружителя в данном случае сохраняется; соответственно (примерно пропорционально , см. формулу (6.4)) возрастает длительность обнаружения для поддержания фиксированной частоты ложных тревог на выходе многоканального обнаружителя в данном случае сохраняется; соответственно (примерно пропорционально , см. формулу (6.4)) возрастает длительность обнаружения  . Однако более существенным в данном случае оказывается другой эффект, непосредственно связанный со случайным характером решающей выборки. Рассмотрим его подробнее. . Однако более существенным в данном случае оказывается другой эффект, непосредственно связанный со случайным характером решающей выборки. Рассмотрим его подробнее.
Последовательная процедура с независимыми решениями продолжается до тех пор, пока не завершится наблюдение во всех каналах, поэтому ее длительность совпадает с длительностью процедуры в канале, где решение было принято последним
. Поскольку решение в каждом канале по условию выносится независимо, вероятность  завершения такой завершения такой  канальной процедуры к некоторому канальной процедуры к некоторому  шагу равна произведению вероятностей завершения шагу процедур во всех каналах: шагу равна произведению вероятностей завершения шагу процедур во всех каналах: , где , где  функция распределения длительности последовательной процедуры в функция распределения длительности последовательной процедуры в  канале. Поскольку по определению канале. Поскольку по определению  , величина , величина  есть убывающая
функция числа сомножителей , иными словами, с ростом вероятность незавершения многоканальной процедуры увеличивается. есть убывающая
функция числа сомножителей , иными словами, с ростом вероятность незавершения многоканальной процедуры увеличивается.
Математическое ожидание  дискретной величины дискретной величины  связано с ее функцией распределения соотношением: связано с ее функцией распределения соотношением:
 . .
Очевидно, что с ростом (уменьшением ) средняя длительность последовательной процедуры возрастает.
На рис.7.2. приведены полученные методом математического моделирования зависимости средней длительности последовательной процедуры от числа каналов при наличии и отсутствии в них сигналов. Для сравнения там же приведена аналогичная зависимость для процедуры Неймана-Пирсона. Из рисунка видно, что для последовательной процедуры возрастает только связанная с порогом  длительность обнаружения , но и не зависящая от длительность длительность обнаружения , но и не зависящая от длительность  наблюдения в каналах, не содержащих сигнал, причем с ростом числа каналов именно этот эффект становится определяющим (при увеличении кривая стремится к ). При этом длительность последовательной процедуры возрастает гораздо быстрее, чем для процедуры Неймана-Пирсона, и существует число каналов , при превышении которого последовательная процедура с независимыми решениями не только перестает давать экономию в длительности наблюдения, но и приводит к потерям. наблюдения в каналах, не содержащих сигнал, причем с ростом числа каналов именно этот эффект становится определяющим (при увеличении кривая стремится к ). При этом длительность последовательной процедуры возрастает гораздо быстрее, чем для процедуры Неймана-Пирсона, и существует число каналов , при превышении которого последовательная процедура с независимыми решениями не только перестает давать экономию в длительности наблюдения, но и приводит к потерям.
Таким образом, процедура с независимыми решениями, достаточно близкая к оптимальной при фиксированном объеме выборки, оказывается малоэффективной или просто неприемлемой для последовательных правил, что подтверждает ранее высказанную мысль о том, что механический перенос на последовательные правила квазиоптимальных решений, полученных в классе правил с фиксированным объемом выборки, может привести к обескураживающим результатам и ошибочным выводам.
В частности, в ряде статей, опубликованных в начале 60-х годов, низкая эффективность последовательной процедуры с независимыми решениями послужила основанием для вывода о неприменимости методов последовательного анализа в системах с высоким разрешением, в том числе, радиолокационных, хотя на самом деле этот вывод справедлив лишь по отношению к вполне конкретной и заведомо неоптимальной процедуре.
7.4. Последовательные процедуры с зависимыми решениями.
Причина низкой эффективности последовательной процедуры с независимыми решениями состоит в том, что время, затрачиваемое на завершение эксперимента в тех каналах, где он затянулся, не используется для уточнения решений, принятых в остальных каналах. Более эффективны алгоритмы, в которых решение о прекращении наблюдения в каждом канале выносится на основании анализа совокупности
значений решающей статистики во всех каналах. При этом становится возможным возврат статистики, пересекшей в каком либо канале порог, в зону неопределенности и последующий повторный выход статистики за порог, поэтому итоговая вероятность ошибок в таких процедурах ниже, чем при независимых решениях. Процедуры рассматриваемого типа иногда называют “процедурами с многократными пересечениями порогов”; примерами могут служить процедура на экстремальной статистике, а также процедура с одновременным решением
.
Процедура на экстремальной статистике применима в тех случаях, когда гипотеза предполагает наличие единственного
сигнала в каком-либо канале. Согласно этой процедуре, накопление парциальной решающей статистики во всех каналах продолжается до тех пор, пока максимальное
из этих значений  не пересечет один из решающих порогов. При пересечении верхнего порога принимается решение о наличии сигнала в том канале, где получено значение не пересечет один из решающих порогов. При пересечении верхнего порога принимается решение о наличии сигнала в том канале, где получено значение  , нижнего – об отсутствии сигналов во всех каналах. Очевидно, что пока экстремальная статистика находится в зоне неопределенности, пересечение нижнего порога в любом другом канале не может привести к принятию гипотезы , как следствие, снижается вероятность пропуска. Поэтому, для обеспечения заданной вероятности пропускав данной процедуре необходима меньшая ширина зоны неопределенности, соответственно, и меньшая средняя длительность наблюдения, чем для процедуры с независимыми решениями. Однако расчет оптимального нижнего порога, обеспечивающего в данной процедуре требуемую вероятность пропуска, оказывается достаточно сложным, что наряду с невозможностью обнаружения более чем одного сигнала снижает ее практическую ценность. , нижнего – об отсутствии сигналов во всех каналах. Очевидно, что пока экстремальная статистика находится в зоне неопределенности, пересечение нижнего порога в любом другом канале не может привести к принятию гипотезы , как следствие, снижается вероятность пропуска. Поэтому, для обеспечения заданной вероятности пропускав данной процедуре необходима меньшая ширина зоны неопределенности, соответственно, и меньшая средняя длительность наблюдения, чем для процедуры с независимыми решениями. Однако расчет оптимального нижнего порога, обеспечивающего в данной процедуре требуемую вероятность пропуска, оказывается достаточно сложным, что наряду с невозможностью обнаружения более чем одного сигнала снижает ее практическую ценность.
Развитием рассмотренной процедуры на случай обнаружения произвольного числа сигналов  является процедура, согласно которой накопление статистики в каждом канале продолжается до шага, на котором статистика во всех каналах одновременно
окажется вне зоны неопределенности, (отсюда название – “процедура с одновременным решением”). Очевидно, что условие выхода за нижний порог всех
парциальных статистик тождественно условию выхода за этот порог максимальной
из них, т.е. с точки зрения принятия гипотезы процедуры на экстремальной статистики с одновременным решением эквивалентны. Различие состоит в том, что в последнем случае возможен возврат в зону неопределенности статистики, пересекшей не только нижний, но и верхний порог, что снижает вероятность ложной тревоги, и позволяет при заданных значениях вероятностей ошибок, дополнительно уменьшить размер зоны неопределенности и среднюю длительность последовательной процедуры. Однако расчет оптимальных значений решающих порогов при этом еще более усложняется. является процедура, согласно которой накопление статистики в каждом канале продолжается до шага, на котором статистика во всех каналах одновременно
окажется вне зоны неопределенности, (отсюда название – “процедура с одновременным решением”). Очевидно, что условие выхода за нижний порог всех
парциальных статистик тождественно условию выхода за этот порог максимальной
из них, т.е. с точки зрения принятия гипотезы процедуры на экстремальной статистики с одновременным решением эквивалентны. Различие состоит в том, что в последнем случае возможен возврат в зону неопределенности статистики, пересекшей не только нижний, но и верхний порог, что снижает вероятность ложной тревоги, и позволяет при заданных значениях вероятностей ошибок, дополнительно уменьшить размер зоны неопределенности и среднюю длительность последовательной процедуры. Однако расчет оптимальных значений решающих порогов при этом еще более усложняется.
|
