| МИНИСТЕРСТВО ОБЩЕГО И ПРОФЕССИОНАЛЬНОГО
ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
ЛИПЕЦКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра электрооборудования
КУРСОВАЯ РАБОТА
по курсу: «Автоматизированный электропривод»
на тему: «Расчет электроприводов постоянного и переменного тока»
Выполнил студент
гр. ЭО – 95 Васин А.В.
____________________
«__» __________ 1999
Принял ассистент
Захаров К. Д.
____________________
____________________
«__» _________ 1999
Липецк 1999
ЗАДАНИЕ
1. Электропривод с двигателем постоянного тока параллельного возбуждения
1.1. По исходным данным (табл.1), используя нагрузочную диаграмму и тахограмму механизма (рис.1), построить нагрузочную диаграмму двигателя. Известны следующие параметры механизма:
JS
— суммарный момент инерции механизма, приведенный к валу двигателя (с учетом момента инерции самого двигателя) при нагрузке Мс1
и Мс2
;
JS
’
=0,2×JS
— суммарный момент инерции при Мс3
и Мс4
.
Цикл работы механизмов состоит из следующих операций: подъем груза с Мс1
=Мс
/h и опускание с Мс2
=Мс
×h, а также подъем грузозахватывающего устройства с Мс3
=0,3×Мс1
и опускание с Мс4
=0,3×Мс2
(при активном моменте статическом; кпд передачи h=0,8).
Операции содержат режимы пуска, установившейся работы, предварительного понижения скорости и тормржения (см. рис.1). Продолжительность включения ПВ%=65% при одинаковом времени пауз.
Время установившейся работы на естественной характеристике tуст
=2×tпуск1
; время работы на пониженной скорости составляет 0,5×tпуск1
. Максимально допустимое ускорение электропривода не должно превышать |eдоп
| в режиме торможения с Мс3
. Во всех остальных переходных режимах момент двигателя должен быть одинаковым, равным Мдоп
=2,5×Мн
.
1.2. По нагрузочной диаграмме выбрать двигатель постоянного тока параллельного возбуждения из серии машин длительного режима работы, имеющих угловую скорость wр
.
1.3. Построить механические w=f(M) и электромеханические w=f(I) характеристики электродвигателя для следующих случаев: пуск в N=2 ступеней, торможение противовключением, получение пониженной скорости w=0,3×wр
шунтированием цепи якоря и возвращение в режим w=0 (остановка) путем торможения противовключением. Определить параметры резисторов.
1.4. Определить пределы, в которых будет изменяться механическая характеристика в естественной схеме включения при колебаниях напряжения питания в пределах ±20%.
1.5. Построить характеристику динамического торможения w=f(I), обеспечивающую замедление с ускорениями, не превышающими |eдоп
|. Мс
=0,5×Мн
. Определить параметры тормозного резистора.
1.6. Изобразить структурную схему двухмассовой системы механизма передвижения тележки. Приняв J1
=Jдв
, J2
=3×J1
, w12
=1,2 с-1
, построить АЧХ при воздействии возмущения на вал механизма.
1.7. Рассчитать и построить механическую характеристику разомкнутой системы УП-Д, если еп
=220 В; внутреннее сопротивление управляемого преобразователя rп
=2×rяд
.
1.8. Изобразить структурную схему и рассчитать уравнение статической механической характеристики в системе УП-Д с замкнутой обратной связью по скорости. Определить коэффициент обратной связи по скорости Кос
и задающий сигнал Uзс
, если статическая механическая характеристика проходит через точки Мн
, wн
и имеет жесткость в 10 раз большую, чем в разомкнутой системе. Преобразователь считать инерционным звеном с коэффициентом усиления Кп
=100, постоянной времени Тп
=0,01 с и с внутренним сопротивлением rп
=2×rяд
.
2. Электропривод с двигателем постоянного тока последовательного возбуждения.
2.1. Согласно заданному варианту выбрать двигатель последовательного возбуждения тихоходного исполнения.
2.2. Рассчитать и построить естественные w=f(I), w=f(M) и диаграмму пусковых характеристик, определить параметры резисторов при пуске в N=3 ступеней.
2.3. Рассчитать и построить реостатные w=f(I), w=f(M), если известны координаты рабочей точки: w=0,6×wн
, Мс
=Мн
. Определить величину добавочного резистора.
2.4. Рассчитать и построить w=f(I), w=f(M) при питании двигателя пониженным напряжением U=0,5×Uн
.
2.5. Рассчитать и построить w=f(M) динамического торможения с самовозбуждением, позволяющего производить спуск груза (нагрузка Мс
=1,5×Мн
). Расчет производить для двух случаев: скорость спуска груза равна wр1
=-0,8×wн
и wр
=-0,3×wн
.
3. Электропривод с асинхронным двигателем.
3.1. Производственный механизм — вентилятор. По заданному варианту рассчитать мощность двигателя и выбрать по каталогу двигатель с фазовым ротором крановой или краново-металлургической серии.
3.2. Рассчитать и построить естественные и реостатные w=f(M) и w=f(I2
), если механическая характеристика проходит через точку wс
=0,5×wн
, Мс
=Мн
. Определить параметры резистора. Построить пусковую диаграмму при пуске в 2;3;3;4 ступени. Определить параметры пусковых резисторов.
3.3. Построить механические характеристики при частотном регулировании с постоянной мощностью в диапазоне 3:1.
3.4. Рассчитать и построить w = f(M), также рассчитать сопротивление добавочного резистора при ЭДТ с независимым возбуждением, если характеристика должна проходить через точку w = wн
, – М = 1,2×Мн
.
ОГЛАВЛЕНИЕ
введение........................................................................................................ 7
1. ЭЛЕКТРОПРИВОД С ДВИГАТЕЛЕМ ПАРАЛЛЕЛЬНОГО ВОЗБУЖДЕНИЯ.................................................. Ошибка! Закладка не определена.
1.1. Построение нагрузочной диаграммы двигателя постоянного тока____ 8
1.2. Выбор двигателя___________________________________________ 12
1.3. Построение механических и электромеханических характеристик электродвигателя постоянного тока________________________________ 13
1.4. Определение предела изменения w=f(М) в естественной схеме при колебаниях напряжения в пределах ±20%_____________________________ 17
1.5. Построение характеристик электродинамического торможения w = f(I), обеспечивающую замедление с ускорениями, не превышающими |eдоп
| Мс
= 0,5´ ´Мн
_________________________________________________ 18
1.6. Структурная схема двухмассовой системы механизма передвижения тележки.____________________________________________________ 21
1.7. Расчет и построение w=f(М) разомкнутой системы УП-Д___________ 23
1.8. Структурная схема и уравнение статической механической характеристики в системе УП-Д с замкнутой обратной связью по скорости.____ 23
2. ЭЛЕКТРОПРИВОД С ДВИГАТЕЛЕМ ПОСЛЕДОВАТЕЛЬНОГО ВОЗБУЖДЕНИЯ................... Ошибка! Закладка не определена.
2.1. Выбор двигателя_______________ Ошибка! Закладка не определена.
2.2. Естественные w=f(I), w=f(M) и диаграмма пусковых характеристик__ 25
2.3. Реостатные характеристики w=f(I), w=f(M)______________________ 27
2.4. Построение w=f(I), w=f(M) при питании двигателя пониженным напряжением U = 0,5×Uн
_____________________________________________ 29
2.5. Построение w=f(M) электродинамического торможения с самовозбуждением, позволяющего производить спуск груза с Мс
= 1,5×Мн
________ 29
3. ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ДВИГАТЕЛЕМ..... Ошибка! Закладка не определена.
3.1. Выбор двигателя_______________ Ошибка! Закладка не определена.
3.2. Расчет и построение естественных и реостатных характеристик w=f(M) и w=f(I2
)____________________________________________________ 35
3.3. Построение w=f(M) при частотном регулировании с постоянной мощностью в диапазоне 3:1.____________ Ошибка! Закладка не определена.
3.4. Расчёт и построение w=f(M) ЭДТ с независимым возбуждением Ошибка! Закладка не определена.
заключение......................... Ошибка! Закладка не определена.
Библиографический список
Ошибка! Закладка не определена.
ВВЕДЕНИЕ
Автоматизация и электрификация всех отраслей народного хозяйства приводит к облегчению труда рабочих, к уничтожению существенного различия между трудом умственным и физическим, к дальнейшему повышению материального благосостояния людей.
Всякое развитое машинное устройство состоит из трех существенно различных частей: машины-двигателя, передаточного механизма, наконец, машины-орудия или рабочей машины.
Назначение первых двух элементов: двигателя с его системой управления и передаточного механизма, куда могут входить валы, шкивы, ремни, шестерни и т. п., заключается в том, сообщить движение исполнительному механизму.
Следовательно, первая и вторая части машинного устройства служат для приведения в движение рабочей машины. Поэтому их объединяют общим названием «привод».
Сегодня электрический привод представляет собой электромеханическое устройство, предназначенное для приведения в движение рабочего органа машины и управления её технологическим процессом. Он состоит из трёх частей: электрического двигателя, осуществляющего электромеханическое преобразование энергии, механической части, передающей механическую энергию рабочему органу машины. И системы управления, обеспечивающей оптимальное по тем или иным критериям управление технологическим процессом. Характеристики двигателя и возможности системы управления определяют производительность механизма, точность выполнения технологических операций, динамические нагрузки механического оборудования и рад других факторов.
Целью курсовой работы является приобретения навыков расчёта автоматизированного электропривода.
1. ЭЛЕКТРОПРИВОД С ДВИГАТЕЛЕМ ПАРАЛЛЕЛЬНОГО ВОЗБУЖДЕНИЯ
1.1. Построение нагрузочной диаграммы двигателя
постоянного тока
Известны следующие параметры механизма:
JS=3,6 Нм×с2
- суммарный момент инерции механизма, приведенный к валу двигателя (с учетом момента инерции самого двигателя) при нагрузке Mc1 и Mc2.
Mc=21 Нм - статический момент.
eдоп
=67 с-2
- допустимое ускорение.
wр=105 с-1
- рабочая скорость.
Цикл работы механизмов состоит из подъема груза с моментом Мс1
и опускание с моментом Мс2
, а также подъем грузозахватывающего устройства с моментом Мс3
и опускание с Мс4
.
Операции содержат режимы пуска, установившейся работы, предварительного понижения скорости и торможения. Продолжительность включения ПВ%=65%, при одинаковом времени пауз.
Характерной особенностью электроприводов инерционных механизмов циклического действия является значительная динамическая нагрузка двигателей в переходных процессах. Относительное время переходных процессов в цикле для этих механизмов также весьма значительно. Поэтому при выборе электродвигателя по нагреву необходимо учитывать динамические нагрузки уже на этапе предварительного выбора. Уменьшение времени переходных процессов обычно ограничено допустимым ускорением (например, по условиям механической прочности). Так как реализация этого ограничения возлагается на привод, то максимальный момент электропривода в переходных процессах также должен быть ограничен.
Определяем эти моменты:
 Н×м; Н×м;
 Н×м; Н×м;
 Н×м; Н×м;
 Н×м. Н×м.
Суммарный момент инерции при моментах Мс3
и Мс4
:
 Нм×с2
. Нм×с2
.
Момент двигателя равен:
 Н×м. Н×м.
Для построения нагрузочной диаграммы Мс
= f(t) и тахограммы w= f(t) необходимо определить время пуска, установившейся работы, предварительного понижения скорости и торможения при различных моментах.
Время переходных процессов определяем с использованием основного уравнения движения из формулы:
 с; с;
 с; с;
 с; с;
 с; с;
 с; с;
 с; с;
 с; с;
 с; с;
 с; с;
 с; с;
 с; с;
 с; с;
 с; с;
 с. с.
Время простоя определяется из выражения:
 . .
Тогда время простоя t0
/4 равно:
 с. с.
По полученным данным построим нагрузочную диаграмму двигателя (рис. 1.1).
.
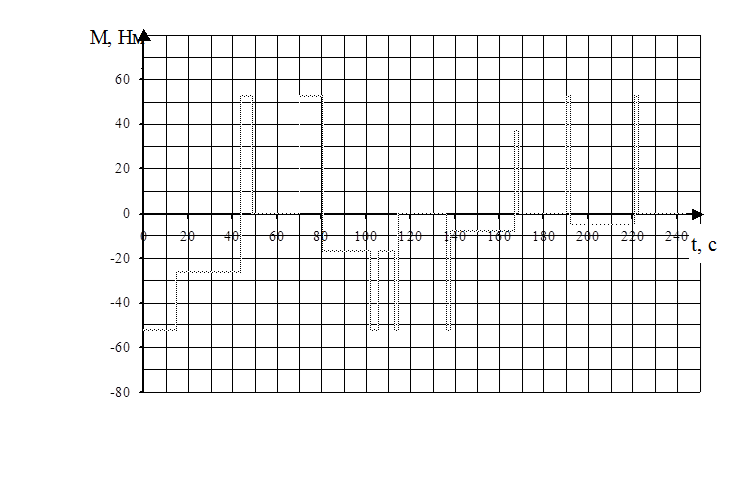
Рис. 1.1. Нагрузочная диаграмма двигателя постоянного тока
1.2. Выбор двигателя
Двигатель постоянного тока параллельного возбуждения выбрать из серии машин длительного режима работы, имеющих рабочую угловую скорость wр
.
Так как для механизма, работающего с циклической нагрузкой, необходимо выбрать двигатель продолжительного режима, то для этого определяем эквивалентный по нагреву момент:

где Мсi
– момент статической нагрузки, соответствующие i-му участку рабочего цикла нагрузочной диаграммы; ti
– время работы двигателя на i-м участке; кз
= 1,1…1,3 – коэффициент учитывающий отличие нагрузочной диаграммы двигателя от диаграммы статической нагрузки.
Расчётная мощность двигателя  Вт. Исходя из Pр и wр по каталогу [1] выбираем двигатель П51 с параметрами: приведёнными в табл.1.1. Вт. Исходя из Pр и wр по каталогу [1] выбираем двигатель П51 с параметрами: приведёнными в табл.1.1.
Таблица 1.1
Основные параметры двигателя типа П51
| Pн = 3,2 кВт
|
Uн = 220 [В]
|
rя+rдп = 1,051 Ом
|
| nн = 1000 об/мин
|
Iн = 18,3 А
|
rпар = 168 Ом
|
| J = 0,35 кг×м2
|
 [c-1
]. [c-1
].
 [Н×М]. [Н×М].
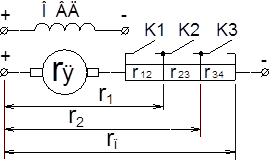
1.3. Построение механических и электромеханических характеристик электродвигателя постоянного тока
Построим w=f(М) или w=f(I) электродвигателя для каждого режима
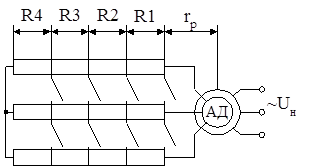
Пуск в 3 ступени (рис.1.3), торможение противовключением, получение пониженной скорости w=0,2×wр
шунтированием цепи якоря (рис.1.4) и возвращение в режим w=0 (остановка) путем торможения противовключением (рис. 1.5). Определить параметры резисторов.
Приведём rя+rдп и rпар к рабочей температуре 75°С:
rя+rдп=1,051×1,22=1,282 Ом ( далее примем rя=1,282Ом );
rпар=168×1,22=205,0 Ом.
Постоянная двигателя:
 Вб; Вб;
 А; А;
 А. А.
Скорость идеального х.х.:
 c-1
. c-1
.
Скорость в установившемся режиме:
 c-1
. c-1
.
Электромеханические характеристики изображены на рис.1.2.
Расчёт пускового реостата аналитическим методом:
 А. А.
Полное сопротивление:
 Ом; Ом;
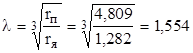 . .
Ток переключения:
 А.. А..
 Ом; Ом;
 Ом; Ом;
 Ом. Ом.
Сопротивления резисторов:
 Ом; Ом;
 Ом; Ом;
 Ом. Ом.
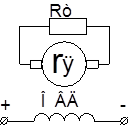
Получение пониженной скорости w=0,2×wр
шунтированием цепи якоря.
По характеристике шунтирования (рис.1.2) находим w0ш=40[c-1
]. Через начало координат проводим прямую, параллельную естественной характеристике. В точке пересечения с характеристикой шунтирования (точка А) находим ток IА=45,7[А].
 [Ом]; [Ом];
 ; ;
 [Ом]. [Ом]. 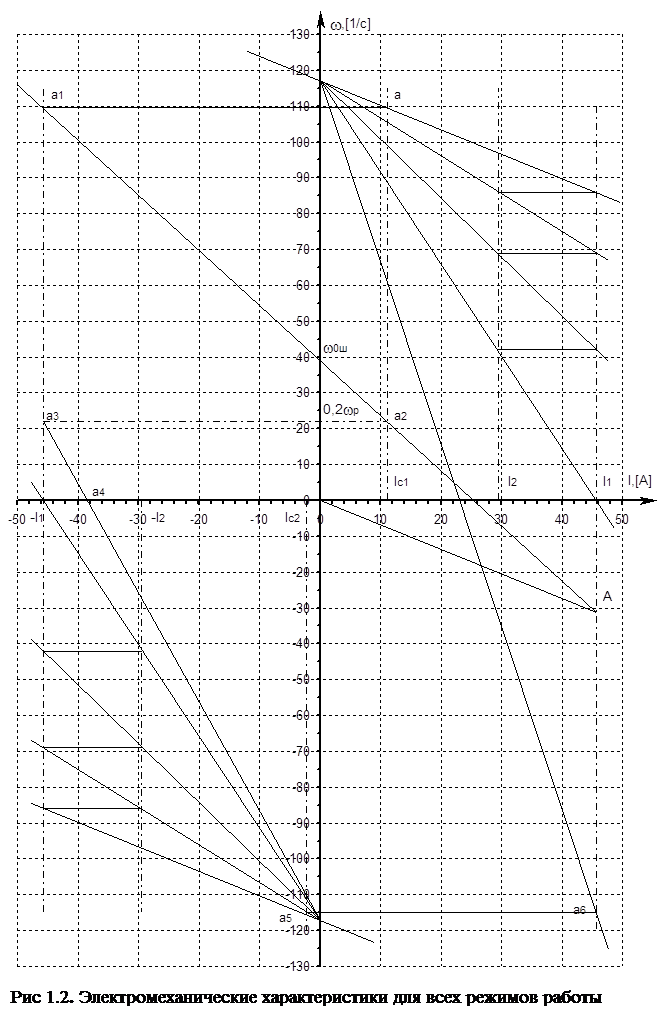
Рис.1.3. Схема пуска двигателя в 3 ступени
Рис.1.4. Шунтирование цепи якоря двигателя
Рис. 1.5. Противовключение
Рис.1.6.Естественная схема
Торможение противовключением (рис.1.5.).
II Квадрант. Скорость в точке а3:
 c-1
; c-1
;
 ; ;
 Ом. Ом.
IV Квадрант. Скорость в точке а6  c-1
. c-1
.
 Ом. Ом.
1.4. Определение предела изменения
w=f(М) в естественной схеме при колебаниях напряжения в пределах ±20%
Естественная схема включения (рис.1.6)
При неизменном сопротивлении цепи возбуждения ток возбуждения изменяется в пределах  . .
По универсальной кривой намагничивания [1] находим:
 ; ;  ; ;
 ; ; 
Характеристики строим по двум точкам:
 [c-1
]; [c-1
]; 
 [c-1
]; [c-1
];
 [c-1
]; [c-1
];
 [c-1
]; [c-1
];
Характеристики изображены на рис.1.7.
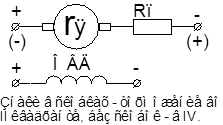
1.5. Построение характеристик электродинамического торможения
w = f(I), обеспечивающую замедление с ускорениями, не превышающими |eдоп
| Мс
= 0,5´ ´Мн
Определим максимальный тормозной момент двигателя
M+Mc=-Jдв×eдоп;
M=- Jдв×eдоп-0,5Mн= Нм; Нм;
 ; ;
 ; ;
Откуда находим сопротивление rт
 Ом. Ом.
Характеристика ЭДТ изображена на рис.1.9.

Рис. 1.8. Схема ЭДТ
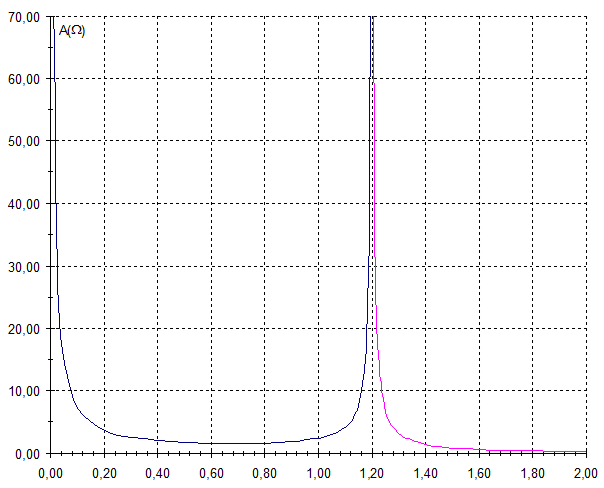
Рис. 1.9. АЧХ при воздействии возмущения на вал 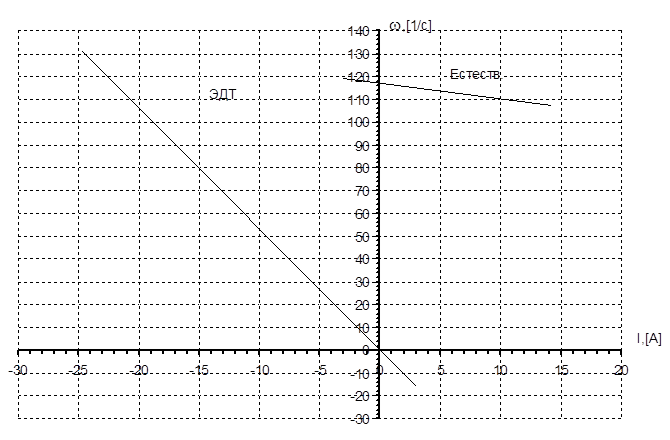
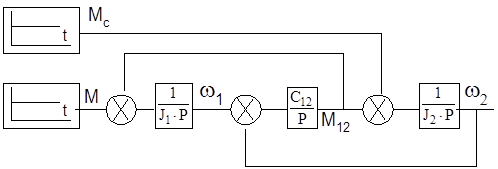
Рис. 1.10. Структурная схема двухмассовой механической системы
1.6. Структурная схема двухмассовой системы механизма передвижения тележки.
Структурная схема двухмассовой механической системы представалена на (рис. 1.10.). Приняв J1=Jдв, J2=3×J1, W12=1,2 с-1
, строим АЧХ при воздействии возмущения на вал механизма.
АЧХ двухмассовой системы:
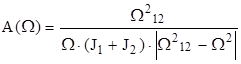 , ,
где  ; ;

Результат расчета приведён в таблице 1.2, график – на рисунке 1.11.
Таблица 1.2
Значения А(W) и W, с–1
| W, [1/c]
|
A(W)
|
W, [1/c]
|
A(W)
|
W, [1/c]
|
A(W)
|
W, [1/c]
|
A(W)
|
| 0,01
|
71,43
|
0,90
|
1,81
|
1,21
|
70,98
|
1,70
|
0,42
|
| 0,02
|
35,72
|
1,00
|
2,34
|
1,21
|
35,27
|
1,75
|
0,36
|
| 0,03
|
23,82
|
1,03
|
2,58
|
1,22
|
17,42
|
1,80
|
0,32
|
| 0,05
|
14,31
|
1,05
|
2,90
|
1,25
|
6,72
|
1,85
|
0,28
|
| 0,10
|
7,19
|
1,08
|
3,36
|
1,30
|
3,16
|
1,90
|
0,25
|
| 0,20
|
3,67
|
1,10
|
4,07
|
1,35
|
1,99
|
1,95
|
0,22
|
| 0,30
|
2,54
|
1,13
|
5,24
|
1,40
|
1,41
|
2,00
|
0,20
|
| 0,40
|
2,01
|
1,15
|
7,61
|
1,45
|
1,07
|
2,05
|
0,18
|
| 0,50
|
1,73
|
1,18
|
14,74
|
1,50
|
0,85
|
2,10
|
0,16
|
| 0,60
|
1,59
|
1,18
|
18,31
|
1,55
|
0,69
|
2,15
|
0,15
|
| 0,70
|
1,55
|
1,19
|
36,17
|
1,60
|
0,57
|
2,20
|
0,14
|
| 0,80
|
1,61
|
1,20
|
71,88
|
1,65
|
0,49
|
2,25
|
0,13
|
Рис. 1.11. АЧХ при воздействии возмущения на вал механизма
Рис. 1.12. Характеристика УП-Д
1.7. Расчет и построение
w=f(М) разомкнутой системы УП-Д
Если Eп=220 В; внутреннее сопротивление управляемого преобразователя равно: rп=2×rяд.
Механическая хар-ка в системе УП-Д имеет вид:
 . .
График строим по двум точкам:
 [c-1
]; [c-1
]; 
 [c-1
]; [c-1
];

График изображен на рис.1.12.
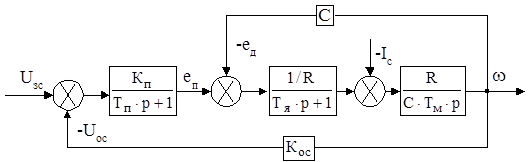
1.8. Структурная схема и уравнение статической механической характеристики в системе УП-Д с замкнутой обратной связью по скорости.
Определим коэффициент обратной связи по скорости Кос и задающий сигнал Uзс, если статическая механическая характеристика проходит через точки Мн, wн и имеет жесткость в 10 раз большую, чем в разомкнутой системе.
Преобразователь считаем инерционным звеном с коэффициентом усиления Кп=100, постоянной времени Тп=0,01 с и с внутренним сопротивлением rп=2×rяд.
 ; ;
 ; ;
 ; ;
 ; ;
 ; ;
 ; ;
 . .
Рис. 1.13. Структурная схема системы регулирования скорости
2. ЭЛЕКТРОПРИВОД С ДВИГАТЕЛЕМ ПОСЛЕДОВАТЕЛЬНОГО ВОЗБУЖДЕНИЯ
2.1.
Выбор двигателя.
Согласно заданному варианту, выбрать двигатель последовательного возбуждения тихоходного исполнения.
Тип двигателя: ДП-21.
Таблица 2.1
Основные параметры двигателя типа Д – 21
| Pн=4,5 кВт
|
rя+rдп=0,94 Ом
|
| nн=900 об/мин
|
rпос=0,275 Ом
|
| Iн=28 А
|
rдв=rя+rдп+rпос=1,215 Ом
|
2.2. Естественные
w=f(I), w=f(M) и диаграмма пусковых характеристик
Естественные характеристики рассчитываем по универсальным, приведённым в справочной литературе [1]. Результаты расчётов приведены в табл.2.2., графики - на рис.2.1.,2.2.
| Таблица 2.2
Результаты расчётов I, w и М
|
 [c-1
]; [c-1
];  [Н×М]. [Н×М].
 [А]. [А].
Рисунок 2.1 Естественная электромеханическая характеристика Рисунок 2.2 Естественная механическая характеристика
 [c-1
]; [c-1
];
 [Н×М]. [Н×М].
Зададимся пусковым током: [А] и током переключения: [А] и током переключения: [А]. [А].
Полные пусковые сопротивления цепи якоря:
 [Ом]; [Ом];  [Ом]. [Ом].
Пусковая диаграмма приведена на рис.2.3. Графически определяем сопротивления ступеней реостата:  [Ом]; [Ом];  [Ом]. [Ом].
2.3. Реостатные характеристики
w=f(I), w=f(M)
Если известны координаты рабочей точки: wс=0,4×wн, Mc=Мн. Определяем величину добавочного резистора:
 ; ;
 Ом. Ом.
Расчёт ведём по формуле:
 . .
Результаты представлены в табл.2.3., графики - на рис.2.6,2.7.
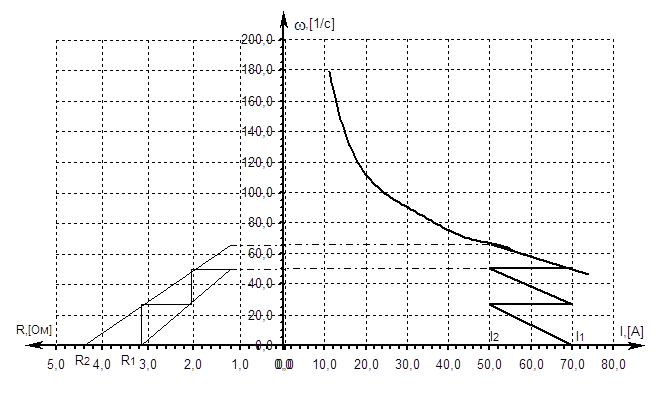
Рисунок 2.3. Пусковая диаграмма
Рис.2.4. Пуск двигателя в 2 ступени

Рис.2.5. Реостатное включение
| Таблица 2.3.
Результаты расчёта

|
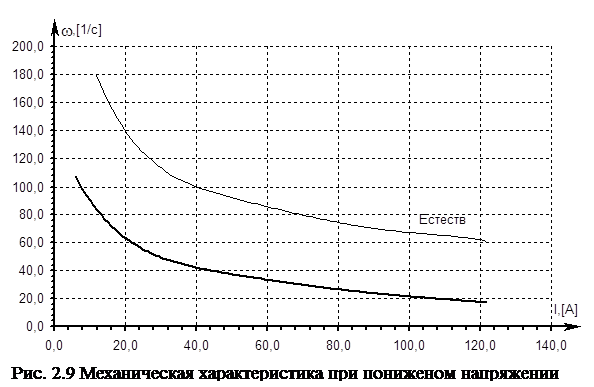
2.4. Построение
w=f(I), w=f(M) при питании двигателя пониженным напряжением U = 0,5×Uн
Расчёт ведём по формуле:
 ; ;
Результаты представлены в табл.2.4., графики - на рис.2.8,2.9.
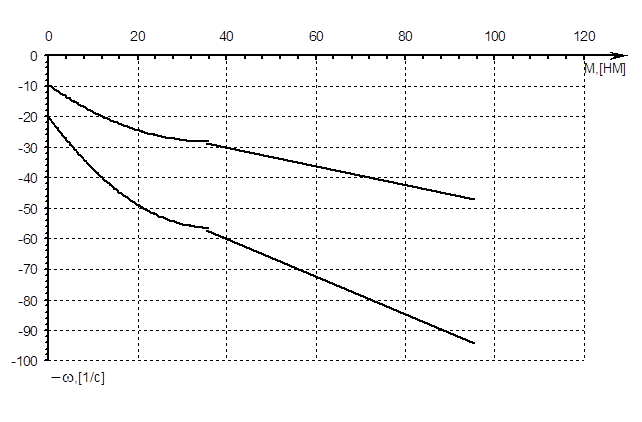
2.5. Построение w=f(M) электродинамического торможения с самовозбуждением, позволяющего производить спуск груза с Мс
= 2×Мн
Расчет производим для двух случаев: скорость спуска груза равна wр1 = -wн и wр2 = -0,5×wн.
Первый режим:
wр1 = -wн= -94,24 c-1
.

Рис. 2.8 Электромеханическая характеристика при пониженом
напряжении
По универсальным характеристикам [1] для заданного Мс находим ток:
Ic=I*×Iн=1,67×28=46,76 A;
 ; ;  Ом. Ом.
При I>Iн характеристику строим по двум точкам: заданной в условии и граничной:
 Н×М; Н×М;
 c-1
. c-1
.
При I<Iн характеристика рассчитывается на основе универсальной по формуле:
 . .
Второй режим:
wр2 = -0,5×wн= -47,12 c-1
;
 Ом; Ом;
 c-1
; c-1
;
 . .
Результаты представлены в табл.2.4, графики - на рис.2.11.
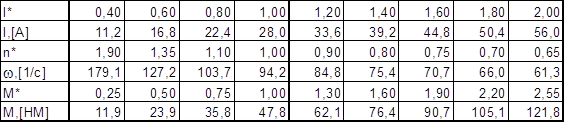
Таблица 2.4
Результаты расчёта
| I*
|
0,4
|
0,6
|
0,8
|
| I, A
|
11,2
|
16,8
|
22,4
|
| M*
|
0,3
|
0,5
|
0,8
|
| M, НМ
|
11,9
|
23,9
|
35,8
|
| w, 1/c
|
43,2
|
48,6
|
57,7
|
| w,1/c
|
21,6
|
24,3
|
28,8
|
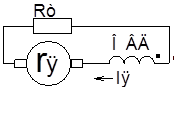
Рис. 2.10. Электродинамическое торможение ДПТ


Рис. 2.11. Электродинамическое торможение с самовозбуждением
3. ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ДВИГАТЕЛЕМ
3.1.
Выбор двигателя
Производственный механизм задается руководителем технологической практики (в качестве рекомендуемых являются механизмы мостовых кранов, вентиляторов, транспортеров и т.д.). По заданному варианту рассчитаем мощность двигателя и выберем по каталогу двигатель с фазным ротором крановой или краново-металлургической серии.
Выбран двигатель крановой серии типа МТ111-6
Таблица 3.1.
Паспортные данные двигателя типа МТ111-6
| Pн=3,5 [кВт]
|
Статор:
|
Ротор:
|
| nн=915 [об/мин]
|
Iсн=10,5[А]
|
Iрн=13,7[А]
|
| Uн=380 [В]
|
Iсх=6,6[А]
|
Ерн=181[В]
|
| Mк/Mн=2,3
|
rс=2,16[Ом]
|
rр=0,525[Ом]
|
| 
|
xс=2,03[Ом]
|
xр=0,755[Ом]
|
| 
|
ke=1,96
|
3.2. Расчет и построение естественных и реостатных характеристик
w=f(M) и w=f(I2)
Если механическая характеристика проходит через точку wс=0,5×wн, Mс=Мн. Определим параметры резистора. Построим пусковую диаграмму при пуске в 3 ступени. Определим параметры пусковых резисторов:
 Ом; Ом;
 Ом; Ом;
 Ом. Ом.
Естественная механическая характеристика строится по 4-м точкам:
1)  c-1
; c-1
;
2)  c-1
; c-1
;
 Н×М. Н×М.
3)  Н×М; Н×М;
 ; ;
 ; ;
 c-1
; c-1
;
4) Н×М. Н×М.
Электромеханическая характеристика построена по формуле
 . .
Пусковая диаграмма:
M1=0,8Mк=67[Н×М]; M2=40 Н×М
Графически определяем r1=1,312 [Ом]; r2=0,7875 [Ом]; r3=0,6825 [Ом].
 [Ом]. [Ом].
Для расчёта реостатной характеристики, проходящей через точку wс=0,5×wн=47,91[c-1
]; Mc=Mн определяю добавочное сопротивление:

Рис. 3.1. Естественная схема включения асинхронного двигателя  Рис. 3.2. Схема включения асинхронного двигателя с пусковыми сопротивлениями в четыре ступени Рис. 3.2. Схема включения асинхронного двигателя с пусковыми сопротивлениями в четыре ступени
Рис. 3.3. Естественная и реостатная механические характеристики
где  ; ;
 ; ;
 ; ;
 Н×М; Н×М;
Уравнение механической характеристики:
 . .
Уравнение электромеханической характеристики
 . .
Результаты вычислений по вышеприведенным формулам сведены в табл. 3.2, естественные и реостатные механические и электромеханические характеристики изображены на рис. 3.3, 3.4.
Таблица 3.2
Значения М, I'2
, I'2p
| w
|
S
|
I'2
, А
|
Mи
|
I'2p
, А
|
| 1
|
2
|
3
|
4
|
5
|
| -200
|
2,9102197
|
38,623286
|
82,849853
|
26,763
|
| -150
|
2,4326648
|
38,158686
|
83,999706
|
24,637561
|
| -100
|
1,9551098
|
37,459867
|
82,823741
|
21,93164
|
| -50
|
1,4775549
|
36,299884
|
77,512088
|
18,443951
|
| -40
|
1,3820439
|
35,97135
|
75,724597
|
17,630905
|
| -30
|
1,286533
|
35,594586
|
73,633769
|
16,774205
|
| -20
|
1,191022
|
35,158671
|
71,209397
|
15,871548
|
| -15
|
1,1432665
|
34,914221
|
69,862223
|
15,402264
|
| -10
|
1,095511
|
34,649278
|
68,419577
|
14,920628
|
| -5
|
1,0477555
|
34,361297
|
66,877251
|
14,426355
|
Окончание таблицы 3.2
| 1
|
2
|
3
|
4
|
5
|
| 0
|
1
|
34,047313
|
65,230966
|
13,919167
|
| 5
|
0,9522445
|
33,703862
|
63,476393
|
13,398792
|
| 10
|
0,904489
|
33,32687
|
61,60917
|
12,864964
|
| 15
|
0,8567335
|
32,911525
|
59,624923
|
12,317427
|
| 20
|
0,808978
|
32,452114
|
57,519288
|
11,755938
|
| 30
|
0,713467
|
31,372449
|
52,926624
|
10,590203
|
| 50
|
0,5224451
|
28,27174
|
42,100949
|
8,0824499
|
| 60
|
0,4269341
|
25,981501
|
35,808991
|
6,7383219
|
| 70
|
0,3314231
|
22,899358
|
28,899343
|
5,3334648
|
| 80
|
0,2359121
|
18,659849
|
21,356684
|
3,8682553
|
| 90
|
0,1404011
|
12,75683
|
13,174739
|
2,3438444
|
| 100
|
0,0448902
|
4,6463251
|
4,3583314
|
0,7622683
|
| 102
|
0,025788
|
2,7320425
|
2,5202397
|
0,4393408
|
| 104,6
|
0,0009551
|
0,1040699
|
0,0941317
|
0,0163405
|
| 106
|
-0,012416
|
1,3718971
|
-1,229199
|
0,2129029
|
| 108
|
-0,031519
|
3,5466634
|
-3,140049
|
0,5421557
|
| 110
|
-0,050621
|
5,7885036
|
-5,074612
|
0,8734503
|
| 120
|
-0,146132
|
17,400402
|
-15,09124
|
2,5592198
|
| 130
|
-0,241643
|
27,809304
|
-25,64234
|
4,2898245
|
| 150
|
-0,432665
|
39,794036
|
-48,06495
|
7,8589994
|
| 170
|
-0,623687
|
43,602101
|
-71,60943
|
11,517313
|
| 200
|
-0,91022
|
44,621873
|
-106,8986
|
17,000206
|
| 230
|
-1,196753
|
44,419388
|
-138,9618
|
22,225976
|
| 260
|
-1,483286
|
44,048313
|
-164,7825
|
26,946156
|
| 270
|
-1,578797
|
43,926609
|
-171,6798
|
28,37642
|
| 280
|
-1,674308
|
43,809804
|
-177,6771
|
29,728587
|
| 290
|
-1,769819
|
43,698658
|
-182,7774
|
31,000769
|
| 300
|
-1,86533
|
43,59345
|
-187,001
|
32,192327
|
| 310
|
-1,96084
|
43,494169
|
-190,3825
|
33,303731
|
 |
Рис. 3.4. Естественная и реостатная электромеханические характеристики 3.7.
Рассчитать и построить w=f(M) ЭДТ с независимым возбуждением
, а также рассчитать сопротивление добавочного резистора, если характеристика должна проходить через точку : w=wн, -M=1,2×Мн.


3.4. Расчёт и построение
w=f(M) ЭДТ с независимым возбуждением
Для получения максимального момента порядка 1,2×Мн
требуется согласно кривым [1] ток возбуждения двух кратный трёхфазный от холостого хода, т. е. ток возбуждения должен быть
Iв
= 2×Iсх
= 2×7,5 = 15 А. (3.34)
Полное сопротивление цепи возбуждения
R = Uн
/Iв
= 220/15 = 14,667 Ом. (3.35)
Добавочное сопротивление цепи возбуждения получится
Rв
= R – 2×rc
= 14,667 – 2×2,09 = 10,487 Ом. (3.36)
где 2×rc
– сопротивления последовательно соединённых двух фаз статора.
Из универсальных механических характеристик динамического торможения для асинхронного двигателя с фазным ротором типа МТ [1] видно, что для каждого тока возбуждения в пределах 2 – 3 кратного неудовлетворительными являются характеристики, соответствующие полному активному сопротивлению Rр
= 1, так как они дают наименьшие тормозные моменты. Поэтому возьмём Rр
= 0,2×Rр.н
, тогда получим
Rт
=  Ом. (3.37) Ом. (3.37)
Так как рабочий участок механической характеристики до кр
практически линейный, то рабочий участок характеристики электродинамического торможения есть прямая линия, проходящая через начало координат и через точку при условии, что Rр
= Rр.н
= 1
w = wн = 95,295 с–1
;
– M = 1,2×Мн
= 1,2×36,728 Н×м.
При Rр
= 0,2×Rр.н
угловую скорость определим из соотношения
 , ,
откуда найдём w0,2
, получим
w0,2
= 0,2×wн
= 0,2×95,295 = 19,059 с–1
.
Механические характеристики w=f(M) электродинамического торможения изображены на рис. 3.7.
 Рис. 3.6. Схема динамического торможения асинхронного двигателя Рис. 3.6. Схема динамического торможения асинхронного двигателя
Рис. 3.7. Механическая характеристика ЭДТ
ЗАКЛЮЧЕНИЕ
В данной работе был проведён расчёт автоматизированного электропривода с двигателями постоянного тока и с асинхронным с фазным ротором. В главе первой рассчитаны характеристики ДПТ параллельного возбуждения типа П52, во второй ДПТ типа Д – 21 последовательного возбуждения и в третьей асинхронного двигателя краново-металлургической серии типа МТ – 12 – 6.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК ИСПОЛЬЗОВАННЫХ
ИСТОЧНИКОВ
1. Вешеневский С.Н. Характеристики двигателей в электроприводе. - М.: Энергия, 1977. - 432с.
2. Ключев В.И. Теория электропривода. - М.: Энергоатомиздат, 1985. - 560с.
3. Чиликин М.Г., Соколов М.М., Терехов В.М., Шинянский А.В. Основы автоматизированного электропривода. - М.: Энергия. 1974. - 568с.
4. Чиликин М.Г., Ключев В.И., Сандлер А.С. Теория автоматизированного электропривода. — М.: Энергия, 1979. — 616 с.
|