Содержание
Введение. 5
1 Анализ микропроцессорной и компьютерной техники для АСУТП.. 6
1.1 Однокристальные контроллеры семейства H8S/2000. 6
1.2 Однокристальный микроконтроллер семейства МСS 51. 7
1.3 Программно-технический комплекс ADAM-5000. 13
1.4 ПЛК типа Simatic. 14
1.5 ПЛК типа DEKONT. 18
2 Разработка технического задания на проектирование АСУТП развальцовки. 22
2.1 Наименование, назначение и область применения разработки. 22
2.2 Технические характеристики. 22
2.3 Техническое описание. 23
3 Ядро АСУТП развальцовки. 24
4 Подсистема ввода. 25
4.1 Разработка датчика крутящего момента. 25
4.1.1 Анализ существующих устройств измерения крутящего момента. 25
4.1.2 Обоснование выбора тензорезистивного преобразователя. 28
4.1.3 Определение напряжения питания тензорезистивного преобразователя. 30
4.1.4 Обоснование геометрических параметров месдозы.. 31
4.1.5 Компоновка датчика крутящего момента. 34
4.1.6 Разработка электрической принципиальной схемы датчика крутящего момента. 35
4.2 Разработка датчика угла поворота. 35
4.2.1 Анализ существующих датчиков измерения угла поворота. 35
4.2.2 Компоновка датчика угла поворота. 38
4.2.3 Выбор элементной базы.. 38
4.2.4 Разработка принципиальной электрической схемы датчика. 39
4.3 Разработка датчика измерения температуры.. 40
4.3.1 Анализ измерительных технических средств измерения температуры.. 40
4.3.2 Разработка электрической принципиальной схемы датчика. 44
4.4 Разработка кнопочной станции управления. 45
4.4.1 Выбор элементной базы.. 45
4.4.2 Разработка принципиальной электрической схемы.. 46
5 Подсистема вывода. 47
5.1 Разработка панели индикации. 47
5.1.1 Выбор элементной базы.. 47
5.1.2 Разработка электрической принципиальной схемы.. 49
5.2 Проектирование привода вальцовки. 49
5.2.1 Обоснование компоновки привода. 50
5.2.2 Выбор элементной базы.. 50
5.2.3 Разработка электрической принципиальной схемы привода. 51
6 Проектирование платы коммутации режимов «АСУТП» / «Ручной». 52
6.1 Выбор элементной базы.. 52
6.2 Разработка электрической принципиальной схемы.. 52
7 Разработка функциональной схемы АСУТП развальцовки. 53
8 Разработка структурной схемы АСУТП развальцовки. 54
9 Разработка электрической принципиальной АСУТП развальцовки. 56
10 Техническое описание АСУТП развальцовки. 56
Список использованной литературы.. 59
Приложения
А – Датчик крутящего момента
Б – Датчик угла поворота
В – Датчик температуры
Г – Панель индикации
Д – Кнопочная станция управления
Е – Электрическая принципиальная схема привода вальцовки
Ж – Плата коммутации режимов
И – Функциональная схема АСУТП развальцовки
К – Структурная схема АСУТП развальцовки
Л – Электрическая принципиальная схема АСУТП развальцовки
Введение
В данном курсовом проекте производится проектирование АСУ ТП развальцовки труб трубных решеток теплообменных аппаратов.
Теплообменные аппараты нашли широкое применение в промышленности, особенно в химической. Они представляют собой набор труб, закрепленными в трубные решетки с двух сторон. Эти трубные решетки являются одними из плоскостей герметичных плоскостей, между которыми происходит взаимообмен жидкостями или газами под большим давлением. Сами трубы являются посредниками обмена, и, в свою очередь, сами находятся во внешнем контуре, в котором циркулирует охлаждающая жидкость. Естественным и необходимым условием является недопущение смешивания рабочей и охлаждающей жидкостей. Поэтому становится очевидным необходимость выполнения соединения труб с трубными решетками с максимальной прецизионностью, что является, несомненно, трудной и дорогой задачей.
Теплообменники применяются на многих предприятиях, поэтому очень актуален вопрос их изготовления. Самым надежным способом закрепления труб в трубные решетки является их развальцовка, причем происходит постоянное усовершенствование и улучшение этого метода.
Целью работы является не только изучение процесса развальцовки (с механической точки зрения), но и также разработка автоматической системы управления этим технологическим процессом; предусмотрев различные режимы работы системы, реализовав подсистему ввода и вывода, также разработав функциональную и принципиальную электрическую схемы АСУ ТП. Общее управление системой производится с помощью ДЕКОНТ - контроллера, обоснование выбора которого и его описание также приводятся в этой работе.
1
Анализ микропроцессорной и компьютерной техники для АСУТП
1.1 Однокристальные контроллеры семейства
H8S/2000
Однокристальные контроллеры семейства H8S/2000H8S/2000. Особенности этого типа контроллеров являются:
1. 24 МГц, экономичные, 16-битное статическое ядро
2. Встроенный контроллер 40-сегментного ЖКИ со схемой формирования повышенного напряжения
3. Встроенное ядро USB 2.0 (FullSpeed) с возможностью питания от шины и от собственного источника для простой реализации последовательного соединения
4. 8 режимов пониженного энергопотребления
5. Вспомогательный тактовый генератор 32 кГц, который может использоваться для уменьшения потребления
6. Высоконадежная встроенная Flash память: 64...384 Кбайт
7. Встроенное быстродействующее ОЗУ: 4...32 Кбайт
8. Встроенный контроллер передачи данных (DTC), формирующий до 85 каналов
9. Встроенный 4-канальный DMA-контроллер (DMAC)
10. Поддержка интерфейса смарт-карт, соответствующего спецификации ISO/IEC 7816-3
11. Многоканальный интерфейс двухпроводной последовательной шины PC
12. Встроенн ый контроллер внешней шины (BSC), реализующий стандартную шину или интерфейс burst-ROM
13. Генератор DTMF-сигналов
Применяется во многих областях, таких как:
– Вычислительная техника: контроллеры клавиатур, USB-устройства, конвертеры последовательного режима, устройства контроля мощности;
– Измерения: Электросчетчики, газовые счетчики, счетчики воды, термостаты;
– Медицина: Мониторы уровня глюкозы в крови, контроллеры систем для введения лекарств, мониторы сердечного ритма, передвижные системы искусственного кровообращения;
– Промышленность/торговля: Устройства контроля токсичности отработанных газов, автомобильное диагностическое оборудование, нефтехимическая промышленность, регистраторы данных, сканеры штрих кода;
– Сети/коммуникации: Преобразователи коммуникационных протоколов, системы GPS.
В настоящее время семейство MCS-51 является лидером по количеству модификаций и выпускающих их компаний среди всех 8-разрядных микроконтроллеров. Оно получило свое название от микроконтроллера 8051, выпущенного в 1980 году компанией Intel на базе технологии n-МОП. На сегодняшний день существует более 200 модификаций микроконтроллеров семейства 8051. Эти модификации включают в себя кристаллы с широким спектром периферии: от простых 20-выводных устройств с одним таймером и 1К программной памяти до 100-выводных кристаллов с 10-разрядными АЦП, массивами таймеров-счетчиков, аппаратными 16-разрядными умножителями и 64К программной памяти на кристалле. Микросхемы для этого семейства производятся рядом фирм различных стран мира, включая Россию (семейства КР1816ВЕ, КР1830ВЕ и др.).
Архитектура семейства MCS-51 в значительной мере предопределяется ее назначением – построение компактных и дешевых цифровых устройств. Микроконтроллеры семейства MCS-51 позволяют выполнять как задачи управления различными устройствами, так и реализовывать отдельные узлы аналоговой схемы. Все микросхемы этого семейства работают с одной и той же системой команд, большинство из них выполняется в одинаковых корпусах с совпадающей цоколевкой, что позволяет использовать для разработанного устройства микросхемы разных фирм-производителей без переделки принципиальной схемы устройства и программы.
Структурная схема контроллера семейства MCS-51, представленная на рисунке 1.1, состоит из следующих функциональных узлов: блока управления, арифметико-логического устройства, блока таймеров/счетчиков, блока последовательного интерфейса и прерываний, программного счетчика, памяти данных и памяти программ. Двусторонний обмен осуществляется с помощью внутренней 8-разрядной магистрали данных. Различные микросхемы этого семейства различаются только регистрами специального назначения (в том числе и количеством портов). Система команд всех контроллеров семейства MCS-51 содержит 111 базовых команд с форматом 1, 2 или 3 байта и не изменяется при переходе от одной микросхемы к другой. Это обеспечивает переносимость программ с одной микросхемы на другую с минимальными трудностями.
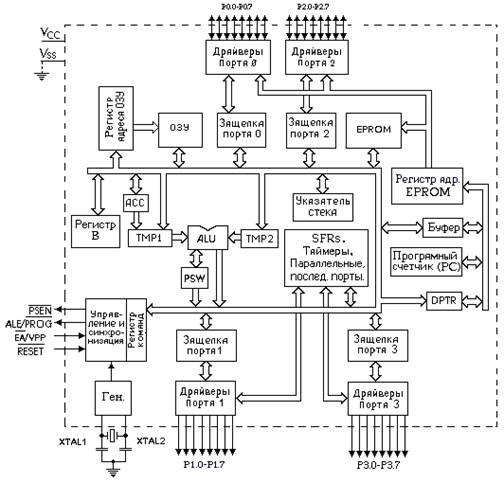
Рисунок 1 – Структурная схема микроконтроллеров семейства MCS-51
Назначение узлов:
1) Блок управления и синхронизации предназначен для выработки синхронизирующих и управляющих сигналов, обеспечивающих координацию работы блоков ЭВМ во всех допустимых режимах ее работы. В состав блока управления входят: устройство формирования временных интервалов, логика ввода-вывода, регистр команд, регистр управления потреблением электроэнергии, дешифратор команд и логика управления ЭВМ.
а) устройство формирования временных интервалов предназначено для формирования внутренних синхросигналов фаз, тактов и циклов. Количество машинных циклов определяет продолжительность выполнения команд. Все команды ЭВМ выполняются за один-два машинных цикла (кроме умножения и деления, продолжительность выполнения которых составляет четыре цикла). Длительность машинного цикла составляет 12 периодов сигнала задающего генератора;
б) логика ввода-вывода предназначена для приема и выдачи сигналов, обеспечивающих обмен информации с внешними устройствами через порты ввода-вывода Р0-Р3 (квазидвунаправленные порты ввода-вывода, предназначенные для обеспечения обмена информацией ЭВМ с внешними устройствами, образуя 32 линии ввода-вывода);
в) регистр команд предназначен для записи и хранения 8-ми разрядного кода операции выполняемой команды. Код операции, с помощью дешифратора команд и логики управления ЭВМ, преобразуется в микропрограмму выполнения команды;
г) регистр управления потреблением (PCON) позволяет останавливать работу микроконтроллера для уменьшения потребления электроэнергии и уменьшения уровня помех от микроконтроллера. Еще меньших величин потребления и помех можно добиться, остановив задающий генератор микроконтроллера. Этого можно достичь при помощи переключения бита регистра управления потреблением PCON.
2) Арифметико-логическое устройство представляет собой параллельное восьмиразрядное устройство, обеспечивающее выполнение арифметических и логических операций. АЛУ состоит из регистров аккумулятора, регистров временного хранения TMP1 и TMP2, ПЗУ констант, сумматора, дополнительного регистра (регистра В), аккумулятора (ACC) и регистра состояния программ (PSW).
а) регистр аккумулятор и регистры временного хранения – восьмиразрядные регистры, предназначенные для хранения операндов на время выполнения операций над ними. Программно не доступны;
б) ПЗУ констант обеспечивает выработку корректирующего кода при двоично-десятичном представлении данных, кода маски при битовых операциях и кода констант;
в) параллельный восьмиразрядный сумматор представляет собой схему с последовательным переносом, предназначенную для выполнения арифметических операций сложения, вычитания и логических операций сложения, умножения, неравнозначности и тождественности;
г) регистр B – восьмиразрядный регистр, используемый во время операций умножения и деления. Для других инструкций он может рассматриваться как дополнительный сверхоперативный регистр;
д) аккумулятор – восьмиразрядный регистр, предназначенный для приема и хранения результата, полученного при выполнении арифметико-логических операций или операций сдвига;
е) регистр состояния программы (PSW) предназначен для хранения информации о состоянии АЛУ при выполнении программы.
3) Блок последовательного интерфейса и прерываний (ПИП) предназначен для организации ввода-вывода последовательных потоков информации и организации системы прерывания программ.
4) Счетчик команд предназначен для формирования текущего 16-разрядного адреса внутренней памяти программ и 8/16-разрядного адреса внешней памяти программ. В состав счетчика команд входят 16-разрядные буфер РС, регистр РС и схема инкремента.
5) Память данных (RAM) предназначена для временного хранения информации, используемой в процессе выполнения программы.
6) Память программ (EPROM) предназначена для хранения программ и представляет собой постоянное запоминающее устройство (ПЗУ). В разных микросхемах применяются масочные, стираемые ультрафиолетовым излучением или FLASH ПЗУ.
Микроконтроллеры семейства MCS-51 построены по Гарвардской архитектуре, т. е. память данных и память программ в этих микросхемах разделены и имеют отдельное адресное пространство. В этих микроконтроллерах имеется пять адресных пространств: память программ, внешняя память данных, три для внутренней памяти. Такое построение памяти позволяет удвоить доступное адресное пространство. Кроме того, такое построение памяти позволяет в ряде случаев увеличить быстродействие микросхем. Для обращения к памяти данных и к памяти программ используются одни и те же шина адреса и шина данных, но разные управляющие сигналы. Для чтения памяти программ вырабатывается сигнал PSEN, а для чтения памяти данных вырабатывается сигнал RD. Для записи информации в память данных вырабатывается сигнал WR. То есть память программ доступна только для чтения, а память данных доступна и для чтения и для записи любой информации, записанной в двоичном коде. Память программ имеет адресное пространство объемом 64 КБ, причем для некоторых микросхем (КР1816ВЕ51, КМ1819ВЕ751, КР1830ВЕ51) для хранения программ на кристалле микроконтроллера расположено ПЗУ. Это ПЗУ отображается в область младших адресов памяти программ. Так как выполнение программы после сброса микроконтроллера всегда начинается с нулевого адреса памяти программ, при включении питания начнет выполняться программа, записанная во внутреннем ПЗУ микроконтроллера. Микроконтроллеры, не имеющие внутреннего ПЗУ (КР1816ВЕ31 и КР1830ВЕ31) могут работать только с внешней микросхемой ПЗУ емкостью до 64 КБ (при использовании портов P1 и P3 в качестве расширителя адреса объем подключаемой ПЗУ может быть увеличен до 1 ГБ). Внешняя память данных предназначена для хранения информации, используемой в процессе выполнения программы. Эта память физически подключена к микроконтроллеру. Максимальный объем определяется регистром DPTR и составляет 64 КБ. Объем внешней памяти данных может быть увеличен за счет использования портов P1 и P3 до 1 ГБ. Внешняя память данных для своей работы требует использование портов P0, P2 и P3, что приводит к увеличению габаритов устройства, увеличению уровня помех и увеличению стоимости устройства в целом. Поэтому в современных устройствах внешняя память не используется. Однако, в некоторых микроконтроллерах (87с550 фирмы DALLAS) команды обращения к внешней памяти используются для работы с дополнительной внутренней памятью большого объема.
Внутреннее ОЗУ данных предназначено для временного хранения информации, используемой при выполнении программы, и занимает 128 (8031, 8051, модели 31, 51 и 751 серий КР1816ВЕ и КР1830ВЕ) или 256 (для всех остальных микроконтроллеров семейства) младших байт.
Устройства серии ADAM-5000 (фирма Advantech) (8) предназначены для построения территориально-распределенных систем сбора данных и управления, обеспечивают выполнение следующих функций:
1. Аналоговый и дискретный ввод-вывод;
2. Первичное преобразование информации;
3. Прием команд от удаленной вычислительной системы и передача в ее адрес преобразованных данных с использованием интерфейса RS-485.
ADAM-5000 применяется для мониторинга и управления технологическими процессами, автоматизации помещений и управления охранными системами и состоит из трех модульных компонентов: процессор, кросс-плата, модули ввода-вывода. Каждое устройство может содержать до 8 модулей ввода-вывода. Система в целом и входящие в ее состав устройства гибко настраиваются в зависимости от количества и вида контролируемых параметров, а также от расположения контролируемых объектов. Устройства могут объединяться в многоточечную сеть на базе интерфейса RS-485, управляемую центральным компьютером. Локальные модули ввода-вывода позволяют существенно снизить затраты на монтаж и обеспечивают удобство обслуживания. Благодаря использованию символьного протокола обмена (ASCII), в качестве управляющей может быть применена любая вычислительная платформа.
Основные характеристики комплекса:
– 16-разрядный микропроцессор 80188;
– Мощность, потребляемая процессором – 1 Вт;
– ОЗУ – 32 кБ, ПЗУ – 128 кБ;
– подключение до 256 систем к одному последовательному порту;
– до 128 каналов цифрового ввода-вывода или 64 аналоговых канала;
– удаленная настройка диапазонов и типов входных аналоговых сигналов;
– гальваническая развязка по входу/выходу/питанию (2500/ 2500/ 3000 В);
– двухпроводные мультиабонентские сети на базе интерфейса RS-485;
– скорость передачи данных до 115200 бод;
– напряжение питания – нестабилизированное, от +10 до +30 В;
– установка на DIN-рельс или панель;
– блок винтовых зажимов: сечение провода от 0,5 до 2,5 мм2
;
– диапазон рабочих температур – от –10 до +70 °C;
– влажность: от 5 до 95% без конденсации;
– индикация состояния «Питание», «ЦПУ», «Cвязь».
Контроллер SIMATIC - это программируемая система управления (SPS) семейства. Он был разработан специально для автоматизации небольших установок.
Он состоит из:
1) стандартной профильной металлической шины (35 мм);
2) модуля питания, работающего от сети АС 11 5/230 вольт;
3) модуля центрального процессора;
4) шинных модулей;
5) периферийных модулей, которые устанавливают на шинные
модули;
6) модулей связи, для случая, если размещать контроллер в не
сколько рядов.
Контроллер – это не «прибор»; он состоит из отдельных блоков, которые смонтированы вместе как составные части, где каждая предназначена для решения своей задачи автоматизации. Благодаря модульной структуре внутренней шины можно устанавливать до 32-х периферийных модулей.
Модуль центрального процессора содержит собственно центральный процессор (CPU), a также блок питания с входным напряжением D 24 В.
Шинные модулиустанавливаются (защелкиваются) на стандартную профильную шину справа от модуля центрального процессора. Каждый шинный модуль содержит посадочные места для двух периферийных модулей. К шинным же модулям подводятся сигнальные провода от датчиков и исполнительных механизмов.
Периферийные модуликонтроллера SIMATIC имеются следующие виды периферийных модулей:
– Модули дискретных входов и выходов.
– Эти типы модулей используются, если решаются простые задачи управления. В распоряжении есть четырех и восьмиканальные модули.
– Модули аналоговых входов и выходов.
– Аналоговые модули используются при работе с непрерывно изменяющимися величинами, такими как: ток, напряжение, температура и сопротивление.
– Модуль симулятора (симулятор).
– Предназначен для имитации входных дискретных сигналов или для индикации выходных дискретных сигналов.
– Модуль питания.
– Например, требуется при работе контроллера S5-100U от сети переменного тока АС 11 5/230 вольт.
– Модуль таймеров.
– Предназначен для аппаратной установки времен с помощью отвертки (без изменения программы).
– Модуль счетчиков.
– Применяется для аппаратного изменения уставок счета с помощью кодовых переключателей (не меняя программы).
– Модуль граничных значений (компаратор).
– Применяется для контроля значений токов и напряжений.
– Модули связи.
– Используются при размещении контроллера в несколько рядов.
Программируемые контроллеры SIMATICS7-xxx – это модульные программируемые контроллеры, предназначенные для построения относительно простых и недорогих систем автоматического управления. Семейство включает в свой состав модули CPU, модули ввода/вывода дискретных и аналоговых сигналов, а также коммуникационные модули.
Контроллеры могут работать в простых сетях PPI, позволяющих выполнять программирование, обмен данными и подключение устройств человеко-машинного интерфейса.
Основные технические характеристики контроллеров серии S7-200 представлены в таблице 1.
Таблица 1 – Основные технические характеристики контроллеров серии S7-200
| Характеристика
|
CPU 221
|
CPU 222
|
CPU 224
|
CPU 226
|
CPU 226XM
|
Объем памяти программ
1инструкция = 2 байта
|
4Кбайт |
4Кбайт |
8Кбайт |
8Кбайт |
16Кбайт |
| Объем памяти данных |
2К слов |
2К слов |
2,5К слов |
2,5К слов |
5К слов |
| Время выполнения 1К логических операций |
0,37 мс |
0,37 мс |
0,37 мс |
0,37 мс |
0,37 мс |
| Количество флагов |
256 |
256 |
256 |
256 |
256 |
| Количество счетчиков |
256 |
256 |
256 |
256 |
256 |
| Количество таймеров |
256 |
256 |
256 |
256 |
256 |
| Количество дискретных входов и выходов CPU |
10 |
14 |
24 |
40 |
40 |
| Количество дискретных входов и выходов системы |
До 10 |
До 78 |
До 120 |
До 248 |
До 248 |
| Количество аналоговых входов и выходов системы |
- |
До 10 |
До 26 |
До 28 |
До 28 |
| Возможность подключения HMI устройств |
+ |
+ |
+ |
+ |
+ |
| Коммуникационный интерфейс |
PPI |
PPI |
PPI |
2xPPI |
2xPPI |
| Сетевая поддержка |
- |
+ |
+ |
+ |
+ |
| Часы реального времени |
+ |
+ |
+ |
+ |
+ |
Контроллеры с сетевой поддержкой способны выполнять функции ведущего устройства AS-интерфейса и функции ведомого устройства PROFIBUS-DP.
Модульные программируемые контроллеры SIMATICS7-300 предназначены для решения задач автоматического управления средней степени сложности.
Конфигурирование и программирование контроллеров серии осуществляется средствами STEP 7. Имеется возможность включения в сети MPI и SIMATICNET.
Высокая вычислительная мощность, комплексный набор команд, наличие MPI интерфейса и способность работы в локальных вычислительных сетях делают контроллер исключительно функциональным.
Набор встроенных функций, всеобъемлющая диагностика, парольная защита, удобная схема подключения внешних цепей, отсутствие ограничений на порядок размещения модулей позволяют создавать многообразные конфигурации системы управления.
Возможность подключения к стойке CPU до трех стоек расширения ввода/вывода, компактность, наличие встроенной шины связи с ПЛК в каждом модуле, возможность использования ТОР-соединителей позволяют размещать контроллер в минимальных монтажных объемах.
Все контроллеры семейства могут подключаться к сетям IndustrialEthernet (только сервер), PROFIBUSDP (ведущее и ведомое устройство), AS-интерфейс (ведущее устройство).
Комплекс обеспечивает контроль и управление по всем имеющимся каналам связи: выделенным 2-проводным линиям (до 50 км), телефонным сетям общего пользования, радиоканалу, аппаратуре уплотнения данных. Имеется возможность сопряжения с интеллектуальными приборами (электросчетчики, теплосчетчики, расходомеры, интеллектуальные кондиционеры и др.) по интерфейсам RS232 и RS485.
Использование единого оборудования при создании и эксплуатации системы. Как следствие:
– уменьшение затрат на внедрение и обслуживание.
– уменьшение количества оборудования на объектах за счет совмещения их функций.
ПТК Деконт применяется там, где требуется собирать технологическую информацию со множества территориально-распределенных объектов, где надо управлять удаленными объектами, где необходим учет производства или потребления энергоресурсов.
Комплекс ДЕКОНТ позволяет создавать:
– системы диспетчеризации и телемеханики;
– системы локальной автоматики и регулирования;
– системы архивирования технологической информации и регистрации событий;
– системы технического и коммерческого учета энергоресурсов;
– комбинированные системы.
Все основные аппаратные компоненты комплекса предназначены для круглосуточного непрерывного режима работы в температурном диапазоне -40…70 °C. Это позволяет устанавливать оборудование на промышленных объектах без дополнительного подогрева или охлаждения.
Основу каждого из модулей ввода-вывода составляет однокристальная микроЭВМ индустриального исполнения и высокой степени интеграции. Поэтому входные сигналы преобразуются, кодируются и в дальнейшем транспортируются в защищенном цифровом виде. Модули не содержат подстроечных элементов – необходимая коррекция преобразователей осуществляется программно.
Технология обработки дискретных входных сигналов позволяет обрабатывать широкий спектр типов и уровней, а также определять такие неисправности сигнальных линий как обрыв, короткое замыкание, нестабильное состояние.
Предлагаемое, в составе комплекса, специализированное ПО для ПЭВМ обеспечивает необходимые функции по загрузке, диагностике, конфигурации системы, а также весь необходимый прикладной сервис:
– представление текущих данных в виде разрабатываемых технологических схем;
– выдача оперативных команд управления;
– формирование отчетов, графиков;
– ведение службы единого времени;
– ведение архивов на удаленных объектах и их автоматическое вычитывание на верхний уровень;
– разработка и коррекция прикладных алгоритмов.
В состав комплекса
входят:
– Модули ввода-вывода.
– Программируемый контроллер Decont-182.
– Сменные интерфейсные платы.
– Малогабаритный пульт оператора (Минипульт).
– Стационарный пульт оператора (Пульт).
– ПО для контроллеров.
– ПО верхнего уровня.
Модули ввода-вывода – это микропроцессорные устройства связи с объектом, осуществляющие первичную обработку входных непрерывных и дискретных сигналов и выдачу управляющих воздействий на исполнительные механизмы. Каждый модуль имеет выход в технологическую сеть на основе интерфейса RS-485. Иными словами, в каждое устройство ПТК ДЕКОНТ заложена возможность подключения к локальной промышленной сети типа BITBUS. Результат обработки сигналов преобразуется модулем в защищенный цифровой вид для дальнейшей передачи в сеть. Из сети модуль получает команды на выдачу управляющих воздействий.
Вычислительные мощности модуля обеспечивают ряд дополнительных функций: выработка сигналов о выходе значения за допустимые пределы, синхронизация времени для ведения единого времени системы, взаимодействие с контроллером, минипультом и т.п.
Каждый модуль представляет собой функционально законченное устройство, заключенное в металлический защитный корпус. Все модули имеют единое конструкторское исполнение, интерфейс и питание.
Контроллер Decont-182 играет ключевую роль в построении любой системы на базе комплекса. Он обслуживает взаимодействие с модулями ввода-вывода, ведет алгоритмы, архивы, поддерживает связь с другими контроллерами и консолью. Дополняемый сменными интерфейсными платами, контроллер позволяет организовывать разнообразные каналы связи между удаленными объектами автоматизации и консолью.
Основные характеристики:
– Базовый процессор – ZILOG 80182 (30 МГц);
– Вспомогательный процессор – PIC16C73A;
– Флэш-ПЗУ – 512 Кбайт;
– Энергонезависимое ОЗУ – 512 Кбайт;
– Количество портов последовательной связи – 4:
· порт «А» – RS-232;
· порт «B» – RS-485;
· порты «C» и «D» – универсальные порты;
– Часы реального времени (РВ);
– Потребляемая мощность – 3 Вт;
– Сторожевой таймер;
– Супервизор управления питанием;
– Потребление в «ждущем» режиме – менее 5 мкА.
2 Разработка технического задания на проектирование АСУТП развальцовки
Автоматизированная система управления технологическим процессом развальцовки предназначена для обеспечения автоматизированной работы технологического оборудования, осуществляющего развальцовку труб в трубных решетках теплообменных аппаратов общего назначения.
Данная АСУТП развальцовки может быть применена на различных предприятиях промышленности, которая производит теплообменные аппараты, на предприятиях где используется технология развальцовки труб, а также производящая ремонтные работы.
2.2 Технические характеристики
| 1. Вариант |
14 |
| 2. Количество постов, шт. |
5 |
| 3. Удаленность постов, м |
300 |
| 4. Тип датчика крутящего момента: |
| 4.1. Величина крутящего момента, Нм |
50 |
| 4.2. Диаметр мездозы, мм |
25 |
| 4.3. Длина мездозы, мм |
26 |
| 4.4. Толщина стенки мездозы, мм |
2 |
| 4.5. Тип тензопреобразователя |
ПП (полупроводниковый) |
| 4.6. Схема включения тензопреобразователя |
ПМ (полумост) |
| 4.7. Материал мездозы |
Сталь 45Х ГОСТ 1050 - 88 |
| 4.8. Твердость материала мездозы |
35HRC; |
| 5. Датчик угла поворота |
Фотоимпульсный |
| 5.1. Количество импульсов на оборот, имп/об |
6 |
| 5.2. Диаметр растрового диска - dр
, мм |
35 |
| 5.3. Толщина растрового диска - bр
, мм |
1,6 |
| 5.4. Глубина прорезей диска, мм |
5…6 |
| 6. Тип датчика температуры |
Термосопротивление |
| 6.1. Диапазон измерений температуры, С0
|
0 – 90 |
| 6.2. Количество датчиков температуры, шт. |
3 |
| 7. Электропривод |
Электродвигатель асинхронный короткозамкнутый |
| 7.1. Мощность, кВт |
1,5 |
| 7.2. Номинальная скорость вращения, об/мин |
1500 |
| 8. Количество кнопок управления, шт. |
6 |
| 8.1. Функциональное назначение кнопок управления |
1 – Вперед; 2 – Назад;
3 – Стоп; 4 – Ручной режим;
5 – Режим АСУТП; 6 – Сеть
|
| 9. Тип элемента индикации |
Светодиод |
| 9.1. Количество светодиодов, шт. |
6 |
В результате разработки микропроцессорной системы управления должна осуществляться следующая последовательность: вычисления, выдача команд управления исполнительному устройству развальцовки.
После включения питания система запрашивает у оператора, в каком режиме она будет работать (ручном, автоматическом или полуавтоматическом). Когда режим работы определен, начинается производственный процесс.
Анализируя информацию от датчиков, расположенных непосредственно на объекте (датчик угла поворота, датчик крутящего момента), компьютер в соответствии с заложенной в него программой сравнивает получаемые им величины с заложенными, таким образом контролируя и корректируя процесс вальцовки.
3 Ядро АСУТП развальцовки
Проанализировав характеристики рассмотренных контроллеров, ядро разрабатываемой АСУТП будем разрабатывать на контроллерах серии DEP. Данный тип контроллеров позволяет вести обработку и управление в режиме реального времени, обладает гибкими возможностями установки и передачей информации в обрабатывающий комплекс. Контроллеры серии DEP могут устанавливаться непосредственной близости от преобразователей и датчиков.
Основу аппаратной части комплекса составляют следующие компоненты:
– Программируемый контроллер Decont-182 с набором сменных интерфейсов;
– Модули ввода\вывода.
Программируемый контроллер Decont-182 обеспечивает взаимодействие с модулями ввода-вывода, ведет алгоритмы, архивы, поддерживает связь с другими контроллерами и верхним уровнем системы. Устанавливаемые в контроллере сменные интерфейсные платы обеспечивают передачу данных по разнообразным каналам связи.
Модули ввода\вывода – это функционально законченные устройства, обеспечивающие необходимую первичную обработку входных физических сигналов с объекта, преобразование их в защищенный цифровой вид для дальнейшей передачи по технологической сети.
Также для связи контроллера с пользователем будет использоваться ЭВМ, совместимая с IBMPC, с помощью которой пользователь может программировать контроллер и осуществлять наблюдение за технологическим процессом.
4 Подсистема ввода
4.1 Разработка датчика крутящего момента
4.1.1 Анализ существующих устройств измерения крутящего момента
TPN-AB и TPN-CB
В тензометрических датчиках крутящего момента серий TPN-AB и TPN-CB применен принцип вращающегося трансформатора для бесконтактной передачи сигнала, что позволяет проводить долговременные стабильные измерения без эффекта щеток и контактных колец. Защита смазкой обеспечивает длительное время работы, что делает оптимальным их применение со встройкой в системы контроля и управления.
Область применения: в ручном электроинструменте – для защиты работников при резкой остановке вращения. В заводском оборудовании, автомобилях, катерах и т.д. Для контроля усилий на вращающихся частях механизмов и машин, а так же для предотвращения их разрушений.
Датчик крутящего момента TPH-A.
Бесконтактные датчики крутящего момента фланцевого типа серии TPH-A обладают высокойчувствительностью, воспроизводимостью и повторяемостью. Они позволяют измерять крутящий момент при частоте вращения до 10000 об/мин. Высокие прочностные характеристики датчиков дополняются использованием дополнительных упругих муфт. Уникальная конструкция без контактных элементов, таких как, контактные кольца, позволяет безопасно эксплуатировать датчик в длительных режимах при высоких частотах вращения. Встроенный усилитель сигнала дает возможность выдавать сигнал по напряжению и токовый сигнал непосредственно на устройства записи и индикации, а также через АЦП на персональный компьютер для сбора и обработки данных.
Выход датчика частоты вращения, входящий в стандартную конфигурацию TPH-A, позволяет одновременно измерять момент и частоту вращения.
Данные датчики имеют некоторые особенности, такие как:
– Высокая торсионная прочность с применением муфт, выше в 10-20 раз, чем у классических моделей.
– Отсутствие вращающихся частей, таких как, токосъемные кольца, делает датчики легкими в обслуживании и позволяет производить точные измерения при высоких скоростях вращения.
– Отсутствие влияния температуры трения в подшипниках делает характеристики датчиков высокостабильными.
– Подача питания на датчик посредством «вращающего трансформатора» и оптическая передача цифровых сигналов позволяют избежать интерференции
– сигнала и минимизировать наводки от вибрации и смещения валов.
– Упругие муфты диафрагменного типа
– Специальный встроенный усилитель позволяет получить сигнал по напряжению (±10 В) и току (4 ÷ 20 мА).
– Тахометрический выход (открытый коллектор) позволяет считать число оборотов (1 импульс/оборот)
Датчик обладает следующими техническими характеристиками:
– Номинальный момент: ±40
– Нелинейность: В пределах ±0.2% НВС* (±0.5% НВС* для 1TMA и выше)
– Гистерезис: В пределах ±0.2% НВС* (±0.5% НВС* для 1TMA и выше)
– Повторяемость: ±0.1% или менее (±0.5% НВС* макс. для 1TMA и выше)
– Номинальный выходной сигнал: ±10 В ±0.02 В (сопротивление нагрузки >10 кОм) ± 8 мА ±0.04 мА (сопротивление нагрузки до 500 Ом) (4 мА для отрицательного номинального момента, 12 мА для «0» и 20мА для положительного номинального момента)
– Диапазон термокомпенсации: -10÷60° С (без конденсации)
– Температурный дрейф ноля: В пределах ± 0.03% НВС*/°C
– Темп. изменение вых. сигнала: В пределах ± 0.03% /°C
– Частотный диапазон: 0 ÷ 1 кГц +1 ÷ -3 дБ (усилитель)
– Уровень сигнала: 50 дБ и более
– Питание: Постоянный ток
– Безопасная перегрузка: 150%
– Насыщение выходного сигнала при нагрузке: ~110%
Тензорезисторы.
Их действие основано на принципе изменения сопротивления металлов и полупроводников под действием деформаций
Чувствительные элементы тензорезисторов могут быть выполнены в виде петлеобразной решетки из тонкой проволоки или фольги, в виде пластинки монокристалла из полупроводникового материала. Чувствительные элементы могут быть также образованы напылением в вакууме полупроводниковой пленки и другими способами.
Чувствительный элемент обычно прикрепляют к основе из изоляционного материала (бумага, лаковая пленка, ткань и др.) с помощью связующего (клея, цемента), которые передают деформацию чувствительному элементу. На объекте исследования основу закрепляют также посредством связующего. Для электрического соединения тензорезистора с измерительными схемами имеются выводы.
Особенность тензорезистора состоит в том, что его чувствительный элемент (решетка), как правило, имеет механическую связь с объектом исследования по всей длине измерительной базы (а не только по концам базы).
Чувствительность тензорезистора к деформациям характеризуется отношением изменения его сопротивления под действием деформации к величине относительной деформации. Широкое распространение тензорезисторов как универсального средства измерения деформаций объясняется возможностью:
1. измерения деформаций при разных размерах базы, начиная с десятых долей миллиметра;
2. дистанционных измерений в большом числе точек;
3. измерений в широком диапазоне температур при самотермокомпенсации или автоматической схемной компенсации;
4. измерений при самых различных внешних условиях (влажность, давление, ионизирующие излучения и др.), неблагоприятных для других измерительных средств;
5. измерения многокомпонентных деформаций на локальных участках объекта исследования.
Они также имеют незначительную массу, широкий частотный диапазон, включающий статические деформации и низкий порог реагирования, высокую надежность и сравнительно низкую стоимость.
Тензорезисторам свойственны и некоторые недостатки:
1. невозможность индивидуальной градуировки;
2. возможность только однократного использования (исключая тензорезисторные преобразователи механических величин);
3. относительно невысокая чувствительность и относительно низкий абсолютный уровень выходных сигналов.
4.1.2 Обоснование выбора тензорезистивного преобразователя
При выборе тензорезисторов принимают во внимание характер решаемой задачи, требуемую чувствительность и точность измерений, а также упругие и структурные особенности материала объекта исследования
Требуемая чувствительность измерений предопределяет выбор тензорезисторов проводникового или полупроводникового типа. При этом следует иметь в виду,, что высокочувствительные полупроводниковые тензорезисторы для целей так называемой общей тензометрии мало пригодны из-за существенной величины температурных и других погрешностей.
Разброс метрологических характеристик тензорезисторов увеличивается как с уменьшением, так и с увеличением базы. В первом случае увеличение разброса вызвано ухудшением условий передачи деформации на решетку, во втором — трудностями, связанными с надежным закреплением большебазных тензорезисторов на поверхности объекта исследования. По этим причинам во всех случаях, когда позволяют задачи исследований, применяют тензорезисторы с базами от 5 до 50 мм. Выбирая малобазные, особенно микропроволочные тензорезисторы, необходимо иметь в виду, что габаритная длина последних может в 1,5—2,5 раза превышать активную базу.
Номинальное сопротивление тензорезисторов прежде всего должно соответствовать входным данным применяемых тензометрических преобразователей или приборов. При тензометрировании машин чаще всего применяют тензорезисторы с номинальным сопротивлением 100—400 Ом.
При меньших величинах номинальных сопротивлений начинает в большей степени сказываться влияние переходных сопротивлений различных контактов, входящих в измерительные цепи (например, токосъемников или штепсельных разъемов), а также влияние сопротивлений измерительных проводов. Поэтому лучше использовать тензорезисторы с большими номинальными сопротивлениями. Вместе с тем чрезмерно большие сопротивления (более 400 Ом) являются причиной увеличения уровня электрических и магнитных помех. Меньшие значения номинальных сопротивлений выбирают только при тензометрировании без усилителей, когда требуется согласовать выходное сопротивление моста с критическим сопротивлением прибора, например гальванометра.
Исходя из вышеизложенных соображений необходимо выбрать тензорезистор. Так как в задании уже задан тип тензорезистора, то исходя из расчета выбираем полупроводниковый тензорезистор Ю-8А:
– Номинальная тензочувствительность +100
– Номинальное сопротивление: R = 220 Ом;
– Рабочий ток: I = 10 мА;
– Габаритные размеры: l = 2 мм, L = 3 мм, b = 0,3 мм;
4.1.3 Определение напряжения питания тензорезистивного преобразователя
Напряжение питания полумоста рассчитывается по формуле:
 , ,
где  - номинальный ток тензорезистора; - номинальный ток тензорезистора;
 - эквивалентное сопротивление схемы. - эквивалентное сопротивление схемы.

Рисунок 2 – Включение тензорезисторов (R
1
иR
4
) по схеме полумоста дополненного до моста стабильными резисторами R2 и R3
Эквивалентное сопротивление берётся из соображения, что напряжение питания прикладывается к двум параллельно соединённым ветвям (R
1-
R
4
и R
2-
R
3
). При равенстве сопротивлений по каждой из этих ветвей протекает номинальный ток тензорезистора.

Зададим номинальный ток тензорезистора как 0.7…0.8 от максимального, тогда напряжения питания будет равно:

Принимаем напряжение питания тензорезистора от стабилизированного источника питания 5В.
4.1.4
Обоснование геометрических параметров месдозы
Проверим заданную толщину месдозы по допустимым касательным напряжениям.
Рисунок 3 – Схема поперечного сечения месдозыДля трубчатого вала

Mкр
– крутящий момент на валу;
D – внешний диаметр месдозы;
d– внутренний диаметр.
По условию прочности должно выполняться условие:

Для стали 45X допустимое [t]=240 МПа.
Толщина месдозы:

Из данных формул можно вывести минимально-допустимую толщину месдозы.

Подставим в данную формулу числовые значения и рассчитаем минимально-допустимую толщину месдозы:

По условию d=2мм, что удовлетворяет условию с некоторым запасом прочности, что приведет к уменьшению чувствительности датчика, но предотвратит возможность разрушения месдозы вследствие действия других сил, возникающих при наклеивании тензорезисторов и монтаже месдозы.
Оценку коэффициента преобразования при измерении момента силы делают путем расчета. Однако такой способ рекомендуется только в тех случаях, когда полностью исключена возможность градуировки тензометрируемого вала.
Для расчетов используют следующие соотношения:
для сплошного вала
для полого (трубчатого) вала

где М — измеряемый крутящий момент, Нм;
D — наружный диаметр вала, мм;
d — внутренний диаметр вала, мм;
a — угол между осью наклонного тензорезистора и образующей вала;
G — модуль сдвига, ГПа.

Деформация лежит в допустимых пределах ±3 тыс.еод, следовательно разрушения тензорезистора не произойдет.
Рассчитаем сигнал с выхода тензометрического моста:
где Uп – напряжение питания датчика.
DR – изменение сопротивления тензорезистора.
R – сопротивление плеча моста.
Так как датчик питается от стабилизированного источника питания 5В то Uпит
=5В. Относительное приращение сопротивления тензорезисторов находим по известному коэффициенту преобразования и тензочуствительности.
Тензочуствительность ST
находим по графику. ST
=2,1
 В В
Таким образом, максимальный диапазон изменения напряжения на выходе датчиков очень мал. Полученное напряжение необходимо усилить с помощью специальных усилителей, что не входит в задание данного проектирования, и поэтому считаем, что сигнал нормализован и его можно подавать на микроконтроллер.
4.1.5 Компоновка датчика крутящего момента
Определение величины моментов сил (крутящих моментов) в приводах и трансмиссиях машин с помощью тензорезисторов производят тремя способами: непосредственным измерением деформаций закручивания вала исследуемого механизма; измерением окружной силы, передаваемой специальным силоизмерителем, встроенным в трансмиссию, и, наконец, специальным тензометрическим преобразователем крутящего момента.
Первый способ прост, однако далеко не на каждый вал можно наклеить тензорезисторы; кроме того, некоторые валы выполняют с большим запасом прочности, что уменьшает измеряемые деформации, увеличивая тем самым погрешность измерения.
Второй и третий способы обеспечивают наибольшую точность, но требуют демонтажа и даже временного (частичного) изменения конструкции исследуемого узла или разрыва силовой цепи, что не всегда осуществимо.
Встроенный силоизмеритель или преобразователь крутящего момента может быть подобран нужной чувствительности и точно проградуирован.
Могут быть также наклеены четыре тензорезистора, соединенные по схеме полного моста. Тензорезисторы, воспринимающие деформации одного знака, включают в противоположные плечи мостовой схемы.

Рисунок 4 – Конструкция преобразователя крутящего момента
4.1.6
Разработка электрической принципиальной схемы датчика крутящего момента
Электрическая принципиальная схема представлена в приложении А.
Электрическая принципиальная схема датчика крутящего момента может быть реализована путем соединения тензорезисторов по схеме полумоста, дополненного до полного моста стабильными резисторами, установленными в корпусе датчика. Примем конструкцию датчика с двумя тензорезисторами Rl, R4, расположенными на месдозе и обычных резисторов R2, R3 расположенных вне месдозы и образующих при соединении через щетки и кольца по электрической схеме на рисунке 4 мост.
4.2
Разработка датчика угла поворота
4.2.1 Анализ существующих датчиков измерения угла поворота
В зависимости от способа представления измеряемого сигнала выделяют аналоговые и цифровые датчики угла поворота. Информация, представленная в цифровом виде, удобна для обработки, поэтому цифровые датчики получили наибольшее распространение. Поскольку в разрабатываемой АСУТП для обработки измерительной информации используется микроконтроллер, то рассматривать будем только цифровые датчики.
Фотоэлектрический кодовый преобразователь.
Принцип действия его состоит в том, что от газонаполненной лампы луч света через светофильтр направляется на кодированный диск, закрепленный на валу, и через диаграммы попадает на фотоэлемент. Один оборот вала делится на части с помощью кодированной шкалы-диска. Этот диск состоит из нескольких концентрических колец, образованных последовательно чередующимися прозрачными и непрозрачными секторами. Каждому из 32 возможных положений цикла соответствует одно число (от 0 до 31 включительно), выраженное в двоичном коде: 1 – соответствует наличию тока, 0 – отсутствию ток; разряд определяется концентрического кольца.
Примером такого датчика может служить датчик WDG 50B. Его характеристики приведены ниже:
– Количество импульсов: 4, 9, 10, 15, 20, 25, 28, 30 … 1500
– Корпус: диаметр 50 мм, длина 44 мм
– Вал: диаметр 8 мм, длина 15 мм
– Максимальное число оборотов: 12.000 об./мин.
– Нагрузка на подшипник: макс. 120 N радиальная, 70 N аксиальная
– Выходные каналы: ABN, ABN инвертированный
– Предельная частота: 200 кГц
– Рабочее напряжение: 4,75 - 5,5 V DC, 10 - 30 V DC
– Рабочая температура:-10 - +70°C
Датчик угла поворота вала (МДП-01М)
В качестве датчика угла поворота вала в ДК ГМК используется магнитный датчик перемещения МДП-01М, который состоит из маркера и чувствительного элемента (датчика). Маркер - управляющий элемент, механически не связанный с датчиком, но связанный с перемещающимся объектом, в качестве которого используется постоянный магнит. Магниточувствительным элементом датчика служит интегральный элемент Холла, выполненный на микросхеме серии К1116. При определённом взаимном расположении управляющего и чувствительного элементов датчика осуществляется коммутационная операция и информация о местонахождении объекта, перемещающегося относительно датчика, преобразуется в электрический сигнал.
Технические характеристики МДП-1М:
| – Напряжение питания, В |
5,0 ± 0,5; |
| – Ток потребления, мА, |
не более 6; |
| – Выходной ток низкого уровня, мА, |
не более 20; |
| – Выходное напряжение низкое, В, |
не более 0,4; |
| – Выходной ток высокого уровня, мА, |
не более 0,2; |
| – Индукция срабатывания, мТл, |
не более 35; |
| – Индукция отпускания, мТл, |
не менее 10; |
| – Время включения, мкс, |
не более 0,25; |
| – Время выключения, мкс, |
не более 0,5; |
| – Диапазон рабочих температур, °С |
-10...+70; |
| – Величина рабочего зазора, Н раб, мм |
1 ÷ 10. |
В последнее время широкое распространение получили так называемые датчики близости, построенные на использовании эффекта Холла. Датчики на основе эффекта Холла реагируют на изменение магнитного потока магнитного поля. Следовательно, если по заданию необходимо получить 6 импульсов на оборот, то по окружности вала в одном сечении устанавливаются элементы, служащие источниками магнитного тока (постоянные магниты).
Достоинства датчиков с использованием эффекта Холла:
– Широкая полоса пропускания;
– Малое воздействие на объект измерения из-за чрезвычайной малости сил, возникающих между этим объектом и датчиком;
– Повышенная надежность, вследствие отсутствия подвижных частей подверженных износу или увеличению зазора;
– Обеспечение гальванической развязки измерительного контура и перемещающего объекта;
– Возможность использования в режиме как цифровых, так и аналоговаых кодов.
Недостатки:
– Малый диапазон измерения;
– Нелинейность измерительного преобразования;
– Необходимость в калибровке в конкретных условиях применения.
Ниже представлены характеристики датчика серии HRS100 (от Honeywell), работающего по этому принципу:
– использование технологии твердотельной микроэлектроники;
– 50 млн. циклов;
– защита от электростатического разряда до ±7 кВ;
– присутствие шлица на валу;
– угол поворота 90º;
– рабочая температура -40...85 ºС;
– защита от превышения питания до 18 В.
4.2.2 Компоновка датчика угла поворота
В качестве датчика угла поворота используем оптическую пару светодиод – фотодиод, разделенную светонепроницаемым диском. Выходной сигнал фотодиода подадим на вход делителя импульсов, и затем обработанный сигнал в систему управления. Конструктивно объединим датчик угла поворота и датчик крутящего момента в одном корпусе.
4.2.3 Выбор элементной базы
Целесообразно выбрать светодиод с инфракрасным спектром излучения, при котором фотодиод может использоваться с защитным ИК фильтром. Номинальный ток светодиода выбирается в пределах до 20% от максимального тока для повышения срока службы излучателя. Фотодиод выбираем на основе кремния, что уменьшает темновой ток и повышает термостабильность датчика.
Для реализации оптической пары выбираем светодиод АЛ107Б и фотодиод ФД27К.
Параметры светодиода отечественного производства АЛ107Б:
– излучаемая мощность – 5,5мВт (при токе в диоде в 100мА);
– время нарастания/спада излучаемой мощности (0,1...0,9Рmax), - 50мкс;
– длина волны, соответствующая максимальному излучению - 0,92-0,98 мкм;
– падение напряжения на диоде, - 1,8 В (при токе, 100мА);
– максимальный ток в диоде - 100мА;
– максимальное обратное напряжение – 2 В;
Параметры фотодиода отечественного производства ФД-27К:
– размер фоточувствительного элемента, 9мм
– спектр, 0,47... 1,12мкм;
– рабочее напряжение, 24В
– темновой ток Iт, не более 1,5мкА
– габариты (без выводов), диаметр 19,6мм, длина 6,5мм
4.2.4 Разработка принципиальной электрической схемы датчика
Принципиальная электрическая схема датчика представлена в приложении Б. Рассчитаем необходимые параметры.
Так как фотодиод расположен вблизи светодиода и с учетом того, что номинальный ток светодиода выбирается в пределах до 20% от максимального тока для повышения срока службы излучателя, получаем:
 мА. мА.
 Ом; Ом;
Принимаем R1 = 1100±5% Ом по ряду Е24. Мощность, рассеиваемая на резисторе, равна:  Вт, выбираем резистор МЛТ-0.25. Вт, выбираем резистор МЛТ-0.25.
В качестве фотоприемника выберем кремниевый фотодиод типа ФД27К (VD2), имеющий очень низкий темновой ток и высокотемпературную стабильность.
Резистор R2 назначаем исходя из технических условий. R2=10..100 кОм. Принимаем R2=100±5% кОм из Е-24 типа МЛТ-0.25. Измерительный модуль ПТК Деконт должен быть настроен так, чтобы вход модуля для подключения ФИД имел гистерезис не менее 2UП
для того, чтобы модуль не реагировал на помеху.
4.3 Разработка датчика измерения температуры
4.3.1 Анализ измерительных технических средств измерения температуры
В промышленном производстве и научных исследованиях наиболее распространены контактные средства, термоэлектрические преобразователи (термопары), пирометры, и др. Широкий диапазон измеряемых температур, разнообразие условий использования и требований определяют многообразие применяемых средств измерения температуры.
Термопреобразователи сопротивления – их принцип действия основан на свойстве проводника изменять своё сопротивление с изменением температуры. Обладают высокой точностью и стабильностью характеристики. Основными частями термопреобразователя сопротивления является чувствительный элемент, защитная арматура и головка преобразователя с зажимами для подключения чувствительного элемента и соединительных проводов. Чувствительные элементымедных преобразователей представляют собой медную проволоку, покрытую эмалевой изоляцией, которая бифлярно намотана на каркас, помещённый в тонкостенную оболочку.
Платиновая проволокане может быть покрыта слоем изоляции. Поэтому платиновые спирали располагают в тонких клапанах керамического каркаса, заполненных керамическим порошком. Этот порошок выполняет функция изолятора, осуществляет фиксацию положения спиралей в каналах и препятствует межвитковому замыканию. Такая конструкция чувствительного элемента позволяет обеспечить высокую механическую прочность, вибростойкость и малую инерционность. Могут измерять в диапазоне от –260 до 1100 градусов.
Примером такого преобразователя могут служить термопреобразователи сопротивления платиновые марок ТСП-Н и ТСП-Р, предназначенные для измерения температуры твердых, сыпучих, жидких и газообразных сред в различных областях народного хозяйства. Основные характеристики данных преобразователей приведены ниже.
Таблица 3 – Основные технические данные термопреобразователей ТСП-Н, ТСП-Р
| Класс допуска |
Rном / 0ºС |
Допускаемое отклонение сопротивления от номинального при 0 ºС,
%
|
Номинальное значение W 100
|
Диапазон измеряемых tºС |
А
B
C |
50
100
500 |
0,05;
0,1;
0,2 |
1,385 |
-200...+850 |
Термоэлектрические преобразователи (термопары) –
их принцип действия основан на зависимости термо-ЭДС от значений температур мест соединения двух разнородных проводников. Термоэлектрические преобразователи имеют очень широкий диапазон измерения: от –200 до 2200 градусов цельсия, могут измерять температуру в точке объекта или измеряемой среды, имеют малые габаритные размеры – от 0,5 мм. Отличаются относительно высокой точностью и стабильностью характеристики, хотя и уступают по этим параметрам термрмопреобразователям сопротивления.
К числу недостатков относится необходимость применения специальных термоэлектродных проводов для подключения к прибору и необходимость стабилизации ошибки на температуру свободных концов.
В таблице 4 приведены особенности и области применения некоторых типов термопар.
Таблица 4 – Особенности и области применения некоторых термопар.
| Тип термопары |
Особенности применения |
| ТХА |
Обладают: — наиболее близкой к прямой характеристикой. Предназначены для работы в окислительных и инертных средах |
| ТХК |
Обладают: — наибольшей чувствительностью;
— высокой термоэлектрической стабильностью при температурах до 600°С.
Предназначены для работы в окислительных и инертных средах.
Недостаток: высокая чувствительность к деформациям |
| ТПП |
Обладают: — хорошей устойчивостью к газовой коррозии, особенно на воздухе при высоких температурах;
— высокой надежностью при работе в вакууме (но менее стабильны в нейтральных средах).
Предназначены для длительной эксплуатации в окислительных средах.
Недостаток: высокая чувствительность термоэлектродов к любым загрязнениям, появившимся при изготовлении, монтаже или эксплуатации термопар |
| ТВР |
Обладают: — возможностью длительного применения при температурах до 22О0°
С в неокислительных средах;
— устойчивостью в аргоне, гелии, сухом водороде и азоте.
Термопары с термоэлектродами из сплава платины с 10% родия относительно электрода из чистой платины могут использоваться как стандартные для установления номинальных статических характеристик термопар методом сравнения.
Недостаток – плохая воспроизводимость термоЭДС, вынуждающая группировать термоэлектродные пары по группам с номинальными статическими характеристиками А-1, А-2, А-3 |
| ТНН |
Обладают:
— высокой стабильностью термоЭДС (по сравнению с термопарами ТХА, ТПП, ТПР);
— высокой радиационной стойкостью;
— высокой стойкостью к окислению электродов.
Предназначены в качестве универсального средства измерения температур в диапазоне температур 0-1230°
С
|
В зависимости от конструкции и назначения различают термопары погружаемые и поверхностные; с обыкновенной, взрывобезопасной, влагонепроницаемой или иной оболочкой (герметичной или негерметичной), а также без оболочки; обыкновенные, вибротряскоустойчивые и ударопрочные; стационарные и переносные и т.д. Основные характеристики некоторых современных моделей термопар представлены в таблице 5.
Таблица 5 – Основные характеристики некоторых современных термопар
| Тип прибора |
ETI-2001 |
ETI-2002 |
ETI-2003 |
| Число диапазонов |
2 |
1 |
1 |
| Диапазон измерений,°С |
-49,9...199,9(1)
-50...1000(2)
|
-49,9...199,9 |
-50...1000 |
| Разрешение |
0,1°
C(1)
|
0,1°
С |
1°
С |
| Точность |
±0,5°С+1%(1)
) ±1°
С ±0,5%(2)
|
±0,5°
С ±1% |
±1°
С ±0,5% |
| Тип сенсора |
ТХА термопара (К тип) |
| Тип индикатора |
ЖК, высота знака 13 мм |
| Размеры |
141x73x35 мм |
| Вес |
220 г |
210 г |
210 г |
Термоэлектроды в термопарах, как правило, соединяют сваркой или пайкой серебренным или оловянным припоем. Эти соединения образуют рабочий спай термопреобразователя. По всей остальной длине термоэлектроды изолируют друг от друга. В большинстве случаев изолированные электроды помещают в защитный чехол с головкой. Такой чехол предохраняет электроды от вредного воздействия измеряемой среды, а головка упрощает соединение термоэлектродов с удлинительными и соединяющими проводами.
Пирометры – принцип действия основан на зависимости параметров излучения от температуры измеряемого тела или среды. Пирометры позволяют производить измерения температуры бесконтактным методом. Пирометры могут измерять температуру от 30 до 4000 градусов цельсия (но не в рамках конкретного конструктивного исполнения). Однако, точность измерения зависит от целого ряда факторов: состояния поверхности измеряемого объекта, наличием промежуточной среды между пирометром и объектом, запылённостью, наличием паразитных источников излучения и т. п. Пирометры обычно поставляются вместе с пирометрическими преобразователями разных типов, выдающих выходной сигнал по напряжению и току, также в комплект могут быть включены блоки запоминания, индикации, линеаризации.
4.3.2 Разработка электрической принципиальной схемы датчика
Согласно заданному режиму 0 ¸ 900
С, а также в связи с тем, что ПТК Деконт имеет специализированные модули для подключения термометров сопротивления модификаций R3IN6-50 (для 50-омного датчика), R3IN6-100 (для 100-омного датчика), R3IN6-500 (для 500-омного датчика) выбираем термопреобразователь сопротивления медный ТСМ Метран-203 (50М), выполненный по классу допуска «В». Краткие характеристики датчика следующие:
– Схема соединений: 2-х, 3-х, 4-х проводная для одного чувствительного элемента;
– Диапазон измеряемых температур: 50...150°С (для класса допуска «В»);
– Степень защиты от воздействия пыли и воды: IP65 по ГОСТ 14254.
– Ном. значение сопротивления (R0
): 50 ± 0,05 Ом
– Масса: от 0,2 до 1,3 кг (в зависимости от длины монтажной части).
Так как датчик имеет сопротивление 50 Ом, то он будет подключен к модулю ввода/вывода R3IN6-50. Данный модуль предназначен для подключения 6 термосопротивлений с сопротивлением 50 Ом. Схема подключения датчика к модулю показана на рисунке 3.9.
Рисунок 5 – Схема подключения датчика к модулю R3IN6-50
На рисунке 5 условными обозначениями показаны:
Rt – термосопротивление, клемма A – питание датчика, B – общий провод, С – измерительный вход.
В связи с тем, что по заданию в АСУТП развальцовки требуется три датчика температуры, то к измерительному модулю сопротивлений ПТК Деконт подключается три аналогичных датчика температуры, выполненных по данной схеме.
Электрическая принципиальная схема датчика представлена в приложении В.
4.4 Разработка кнопочной станции управления
4.4.1 Выбор элементной базы
Для управления технологическим процессом необходимо разработать панель управления на базе кнопок и электромагнитных реле, с помощью которых формируются командные сигналы, поступающие на микроконтроллер.
В качестве кнопок будем применять выключатели кнопочные серии ВК14-21. Выключатели предназначены для коммутации электрических цепей управления переменного тока частотой 50 и 60Гц напряжением до 660В и постоянного тока напряжением до 440В. Выключатели применяются для комплектации панелей, пультов, постов и шкафов управления в стационарных установках. Габаритные размеры показаны на рисунке 6.

Рисунок 6 – Габаритные размеры выключателей кнопочных ВК14-21
Выключатели могут иметь следующие виды контактов:
– 2 замыкающих контакта;
– 1 замыкающий и 1 размыкающий;
– 2 размыкающих контакта;
– 1 замыкающий;
– 1 размыкающий.
Будем использовать реле промежуточное серии РП-16-1. Реле промежуточные РП-16-1 предназначены для применения в электрических схемах промышленной автоматики и релейной защиты. Параметры реле приведены в таблице 6.
Таблица 6 – Параметры реле РП-16-1
| Тип реле |
Напряжение питания, В |
Коммутируемый ток, А |
Коммутируемое напряжение, В |
Количество контактов |
постоянного
тока
|
переменного тока |
постоянного тока |
переменного тока |
| РП-16 |
12…220 |
100…220 |
0,05…5 |
24…220 |
100…220 |
4з/3р |
Так как в разрабатываемой АСУТП большинство цепей питается от источника напряжения 24В, то имеет смысл использовать реле РП-16, с номинальным напряжением 24В.
4.4.2 Разработка принципиальной электрической схемы
Данная панель управления позволяет управлять электроприводом в ручном режиме, обеспечивая возможность вращения электродвигателя в обе стороны, а также возможность его останова. В ручном режиме должны обеспечиваться варианты управления: «Вперед», «Назад», «Стоп». За счет панели коммутации возможность воздействия на электродвигатель с панели управления при автоматическом режиме исключена.
Кнопки «Вперед» (S1) и «Назад» (S2) подключены к обмоткам реле K1 и K2 соответственно. Нормально разомкнутые контакты этих реле замыкают контакты 1, 2 и 3 разъема X1. Разъем X1 соединяется с помощью кабеля к приводу вальцовки. Таким образом, осуществляется управление направлением вращения вальцовки.
Кнопка «Стоп» (S3) предназначена для останова движения. При нажатии на кнопку S3 поступает ток на реле K3. Реле размыкает контакты K3.3 и остаются в текущем положении до тех пор, пока не будут нажата кнопка S1 или кнопка S2.
Подключение панели управления к ПТК для передачи микропроцессорной системе сигнала будем осуществлять с помощью модуля DIN16C-24.
Схема, поясняющая принцип подключения панели к модулю, показана на рисунке 7.

Рисунок 7 – Схема подключения панели к модулю DIN16C-24
Схема электрическая принципиальная кнопочной станции управления приведена в приложении Д.
5 Подсистема вывода
5.1 Разработка панели индикации
5.1.1 Выбор элементной базы
Для показания состояния технологического процесса и режимов необходимо разработать панель индикации, показывающую режимы работы установки.
В качестве индикаторов выбираем светодиоды зелёного цвета АЛ307ВМ, красного цвета АЛ307БМ и желтого цвета АЛ307ДМ.
Технические характеристики светодиодов занесены в таблицу 7
Таблица 7 – Технические характеристики светодиодов
| Тип светодиода |
Цвет |
Напряжение питания, В |
Рабочий ток, mA |
Максимальный прямой ток, mA |
| АЛ307БМ |
Красный |
2 |
10 |
22 |
| АЛ307ВМ |
Зеленый |
2,8 |
20 |
22 |
| АЛ307ДМ |
Желтый |
2,5 |
10 |
22 |
Будем использовать светодиод красного цвета для индикации:
– «Стоп»
Будем использовать светодиод желтого цвета для индикации:
– «Ручной»
Будем использовать светодиоды зеленого цвета для индикации:
– «АСУТП»
– «Вперед»
– «Назад»
Светодиоды подключаются к модулю через ограничительные резисторы.
Расчёт ограничительного резистора:
Для АЛ307БМ:
 Ом; Ом;
Берем Rк
из ряда Е24: Rк
= 1,0 кОм±5% тип МЛТ-0,25
Для АЛ307ВМ:
 Ом; Ом;
Берем Rз
из ряда Е24: Rз
= 1,0 кОм±5% тип МЛТ-0,25
Для АЛ307ДМ:
 Ом; Ом;
Берем Rз из ряда Е24: Rж
= 1 кОм±5% тип МЛТ-0,25
5.1.2 Разработка электрической принципиальной схемы
В модуле DOUT8-R07 содержатся 8 реле. У четырех реле замыкающие контакты, у остальных четырех – переключающие. На схеме общий провод обозначен как GND.
В ручном режиме световые сигналы СТОП, ВПЕРЕД, НАЗАД должны формироваться панелью управления. В автоматическом режиме указанные сигналы должны формироваться микропроцессорной системой. Сигналы РУЧНОЕ и АВТОМАТИЧЕСКОЕ формируются только панелью коммутации режимов.
При включении режима РУЧНОЕ нажатием соответствующей кнопки на панели переключения режимов в схеме панели индикации появляется сигнал «РУ», который зажигает соответствующий светодиод. Аналогично происходит зажигание светодиода, индицирующего нажатие кнопки «Автоматическое». Зажигание светодиода индицирующего режим «Вперед» происходит в ручном режиме при поступлении сигнала «Вперед ПУ» с панели управления или же по приходу сигнала «Вперед АУ» от микропроцессорной системы. Цепи светодиодов индицирующих режимы «Стоп» и «Назад» функционируют также как и для режима «Вперед».
Схема электрическая принципиальная панели индикации приведена в приложении Г.
5.2 Проектирование привода вальцовки
5.2.1 Обоснование компоновки привода
В качестве привода выбираем асинхронный электродвигатель с короткозамкнутым ротором. Данный тип двигателей является наиболее распространенным в промышленности. К достоинствам можно отнести: высокая надежность и простота.
Электродвигатель подключается к трехфазной сети переменного тока 380. Так как мы должны управлять двигателем с помощью контроллера, то двигатель будет соединен с магнитными пускателями. Магнитный пускатель представляет собой 2 реле, одно из которых подключает двигатель к питающей сети, а другое подключает в обратной последовательности (обычно 1-2-3 и 3-2-1). Таким образом, можно реверсировать двигатель.
Так как при работе асинхронного электродвигателя есть вероятность короткого замыкания (например, при заклинивании механизма), то в магнитных пускателях обычно находятся тепловые реле. Тепловое реле срабатывает при протекании через него большого тока и размыкает силовые линии.
5.2.2 Выбор элементной базы
Согласно заданию, мощность двигателя должна быть 1500 Вт. Берем асинхронный двигатель с короткозамкнутым ротором модели 5А80МВ4. Параметры электродвигателя приведены в таблице 8.
Таблица 8 – Параметры двигателя 5А80МВ4
| Номинальная мощность, кВт |
1,5 |
| Номинальная частота вращения, об/мин |
1500 |
| Номинальный ток при 380 В , А |
3,6 |
| КПД, % |
76 |
| Коэффициент мощности |
0,81 |
| Отношение пускового тока к номинальному |
5,5 |
| Отношение пускового момента к номинальному |
1,9 |
| Отношение максимального момента к номинальному |
2,2 |
| Масса, кг |
14,7 |
По заданию, привод должен вращаться в обе стороны, поэтому возьмем реверсивный пускатель с тепловой защитой. Берем пускатель ПМ 12-025641. Параметры пускателя приведены в таблице 9.
Таблица 9 – Параметры пускателя ПМ 12-025641
| Максимальный ток, А |
25 |
| Максимальное напряжение, В |
660 |
| Кнопки управления |
нет |
| Число и исполнение контактов вспомогательной сети |
2з – 4р |
| Реверс |
да |
5.2.3 Разработка электрической принципиальной схемы привода
Электрическая принципиальная схема представлена в приложении Е.
Электродвигатель управляется с помощью магнитного пускателя. Вращение по часовой стрелке происходит при срабатывании реле K1, против – K2. При срабатывании теплового реле K3 вращение прекращается. В магнитном пускателе реализована электрическая защита от короткого замыкания (при включении одновременно реле K1 и K2), это осуществляется с помощью контактов реле K2.3 и K1.3.
Команды на вращение двигателя могут поступать от ЛУСО (разъем X3) или от панели ручного управления (разъем X2). Сигнал режима поступает от разъема X5, к цепям которого подключено реле K5, срабатывающее при включении автоматического режима. Все сигналы управления («Вперед», «Назад») проходят через контакты реле K5, таким образом осуществляется выбор сигналов. Например, при включении автоматического режима, реле K5 срабатывает, контакты K5.1, K5.2 и K5.5 замыкаются и сигналы от ЛУСО проходят к пускателю, а контакты K5.3 и K5.4 размыкаются и сигналы управления от панели управления не проходят на пускатель.
Сигнал «Стоп» подключен к реле K4, все сигналы управления приводом проходят через нормально замкнутые контакты реле К4. Таким образом, при подачи сигнала «Стоп», магнитный пускатель размыкает цепь 380В – электродвигатель.
Текущее состояние привода можно наблюдать на панели индикации, для этого есть разъем X4, к которому подключены контакты реле K1 и K2.
6 Проектирование платы коммутации режимов «АСУТП» / «Ручной»
6.1 Выбор элементной базы
Необходимо разработать панель коммутации режимов на базе кнопок и электромагнитных реле, с помощью которых происходит коммутация сигналов от датчиков на ЛУСО.
Для платы коммутации режимов будем использовать два кнопочных выключателя серии ВК14-21, имеющих один замыкающий и один размыкающий контакты.
Будем использовать два реле серии РП-16. Реле промежуточные РП-16 предназначены для применения в электрических схемах промышленной автоматики и релейной защиты. Параметры реле приведены ранее в таблице 6.
6.2 Разработка электрической принципиальной схемы
Главными элементами панели является реле K1 и К2, при срабатывании которых система переходит в автоматический режим работы (контакт K2.1). Включение режимов осуществляется двухпозиционной кнопкой S1. При срабатывании кнопки S1 система переходит в автоматический режим работы «Авт.», а при включении кнопки S2 – ручной «Руч.». При нажатии кнопки S1 происходит срабатывание реле. Параллельно кнопке S1 включен контакт K1.1, таким образом происходит фиксация состояния реле К1 и К2. При нажатии кнопки S2 происходит размыкание цепи +24В – S1/K1.1 – K1 и реле К1 и К2 отключаются.
Кроме разъема питания, панель имеет 3 разъема. К разъему X2 подводятся все сигналы с датчиков: контакты 1-6 - два термосопротивления, контакты 7-8 - датчик крутящего момента и контакты 9-10 датчик угла поворота. А с разъема X4 все сигналы поступают на соответствующие модули. Между разъемами находятся контакты реле К1 и К2, позволяющие в ручном режиме отключить все сигналы, идущие от датчиков на ЛУСО.
С разъема X3 выходят сигналы, определяющие работу привода (от панели управления или от ЛУСО), на блок управления приводом и на панель индикации для индикации текущего режима.
Схема электрическая принципиальная платы коммутации режимов приведена в приложении Ж.
7 Разработка функциональной схемы АСУТП развальцовки
Разработка функциональной схемы АСУТП развальцовки введется в соответствии с функциональными блоками, которые выбираются исходя из особенностей технологического процесса. К ним относятся функциональные блоки: ПТК Decont; персональный компьютер типа IBMPC; блоки питания; модули ввода/вывода; панели и датчики. модули измерения угла поворота, температуры, крутящего момента, система управления приводом вальцовки, блоков управления и индикации. Из этих блоков состоят пять постов, удаленных друг от друга на расстояние 300м. Программируемый логический контроллер «Деконт-182» осуществляет контроль и управление процессом развальцовки. Модули ввода/вывода обмениваются информацией с ним по сети.
Персональный компьютер типа IBMPC является верхним уровнем системы. Он предназначен для сбора информации от контроллера. Еще одно назначение – загрузка технологической программы управления в контроллер.
Блоки питания осуществляют питания всех функциональных модулей системы.
Оператор взаимодействует с оборудованием и панелями: управления, коммутации режимов и индикации. К управляемому оборудованию относится привод вальцовки, который управляется либо от модуля ввода/вывода, либо от панели управления.
К датчикам относится: датчик крутящего момента, датчик температуры и датчик угла поворота. Датчики обеспечивают сбор информации о текущем состоянии и параметрах оборудования. Все датчики подключены к модулям ввода.
Для датчика угла поворота потребуется счетный дискретный модуль ввода (так как выходным сигналом является последовательность импульсов), для датчика крутящего момента – аналоговый модуль ввода, для датчика температуры – модуль измерения сопротивления.
Модули ввода обеспечивают сбор и первичную обработку информации от датчиков и ее передачу на программируемый логический контроллер. Модули вывода осуществляют преобразование цифрового сигнала в дискретный (включено/выключено).
8 Разработка структурной схемы АСУТП развальцовки
С точки зрения архитектуры построения, комплекс представляет собой структурированную систему, состоящую из унифицированных модулей, базирующихся на принципах сетевых технологий.
Основным элементов АСУТП является программируемый логический контроллер Decont-182. К нему с помощью интерфейса RS-485 подключены модули ввода/вывода. Контроллер имеет несколько портов интерфейса RS-485: В, С и D. Причем, порты C и D не входят в базовую комплектацию и расположены на плате расширения Z-2xRS-485.
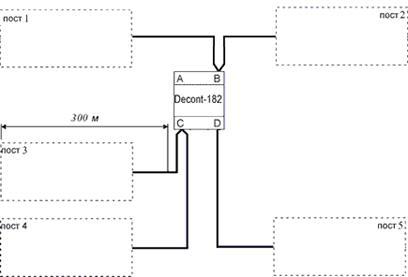
Рисунок 8 – Структура локальной сети
На рисунке 7.1. показана структура локальной сети. К порту A контроллера Decont-182 подключен персональный компьютер типа IBMPC. Для этого используется сетевой адаптер PC-I-RS485.
Пост 1 и пост 2 соединены в единую сеть, также в эту сеть соединен контроллер Decont-182 (порт B). Принцип соединения других постов такой же. Таким образом, протяженность одной сети составляет 2400 м, что вполне согласуется со стандартом на сети с интерфейсом RS-485 [6, стр.56].
Для подключения датчиков и исполнительных механизмов используем следующие модули ввода/вывода:
1) DIN16C-24 – для ввода дискретных сигналов от датчика угла поворота и панели управления;
2) DOUT8-R07 – для вывода дискретного сигнала на привод;
3) R3IN6-50 – для измерения сопротивления термометра сопротивления;
В качестве блоков питания будем использовать следующие блоки:
1) PWS24V1A (24В) – для питания контроллера Decont-182;
2) PWS24V1A (24В) – для питания модулей ввода/вывода;
3) PWS24V1A(24В) – для питания датчиков, исполнительных механизмов и панелей оператора;
4) PWS5V5A (5В) – для питания датчика крутящего момента
9 Разработка электрической принципиальной АСУТП развальцовки
На основании рассмотренного материала и расчета разработаем схему электрическую принципиальную АСУТП развальцовки.
Так как на одну клемму может быть заведено не более 2 проводов, то в схему необходимо добавить клеммный блок (A5). Ввиду того, что модули ЛУСО будут расположены рядом друг с другом, то достаточно будет соединить один модуль с другим. В случае датчиков, исполнительных механизмов и панелей оператора (ввиду их удаленности друг от друга) придется использовать клеммник. Будем использовать клеммник K16-20.
Каждый датчик или устройство подключается к блокам питания или ЛУСО с помощью разъемов. Это позволяет производить замену датчика не трогая кабели.
Чтобы гальванически разделить микропроцессорные средства и аналоговые/дискретные устройства необходимо использовать разные блоки питания. Поэтому для питания контроллера будем использовать БУ1 PWS24V1A (24В); для модулей ввода/вывода – БУ2 PWS24V1A (24В); для датчика крутящего момента – БУ3 PWS5V5A (5В); для датчиков и исполнительных механизмов – БУ4 PWS24V1A (24В).
10 Техническое описание АСУТП развальцовки
АСУТП предназначена для крепления труб в трубных решетках теплообменных аппаратов трехроликовой вальцовкой. При этом достигается повышение качества и производительности по сравнению с неавтоматизированным производством, а также достигается больший ресурс вальцовочных соединений и инструмента.
В состав АСУТП входит 5 постов развальцовки удаленных на 300 метров. Разработанная система включает в себя датчик крутящего момента, датчик угла поворота, 3 датчика температуры, а также микропроцессорную систему, состоящую из модулей ввода/вывода, контроллера, интерфейсной платы и персонального компьютера типа IBMPC. Также в составе АСУТП имеется привод вальцовочного оборудования, панель индикации, управления и коммутации режимов.
Модули постов взаимодействуют между контроллером по интерфейсу RS-485.
Панель коммутации позволяет переключаться между автоматическим и ручным режимами. В автоматическом режиме технологический процесс осуществляется под управлением микропроцессорной системы. В ручном режиме перемещением вальцовки управляет оператор (кнопки «Вперед» и «Назад»). Кнопка «Стоп» на панели управления позволяет остановить привод вальцовки в случае возникновения аварийных или иных ситуаций.
Панель индикации позволяет наблюдать режимы работы АСУТП и команды, отрабатываемые приводом вальцовки как в ручном, так и автоматическом режимах управления.
Датчик крутящего момента реализован на тензометрическом преобразователе. Датчик угла поворота – на фотоимпульсном преобразователе.
Для осуществления процесса вальцовки оператор включает автоматический режим (кнопка S1, панель коммутации режимов), при этом срабатывает реле K1 и К2 на панели коммутации и выходы/входы датчиков соединяются с модулями ЛУСО, на панели индикации загорается светодиод VD4 («АСУТП»).
При включении ручного режима (кнопка S2 панели коммутации), происходит отключение всех цепей датчиков от модулей ЛУСО. В этом режиме можно производить замену датчиков или модулей ЛУСО.
Список использованной литературы
1. Тензометрия в машиностроении. Справочное пособие / Под ред. Р. А. Макарова. М.:Машиностроение, 1975.
2. Данилин, В.Я. Создание АСУТП в отраслях промышленности. Часть I. Основные положения создания АСУТП: учеб. пособ./ ВолгГТУ, Волгоград, 2001.
3. Светодиоды обычной яркости, отечественные. Технические характеристики [Электронный ресурс]. – [2005].– Режим доступа:http://www.amplepro.ru/rr.shtml?page=catalog&pcod=0300000000000000&manuf_id=52
4. Коммутационное оборудование [Электронный ресурс]. – [2005]. – Режим доступа: http://www.emko.ru/rele/rele_391.html
5. Термопреобразователи сопротивления ТСМ и ТСП Метран-200. Руководство по эксплуатации [Электронный ресурс]. – [2004].– Режим доступа: http://www.metran.ru/rukovodstva/m200.pdf
6. Асинхронные электродвигатели [Электронный ресурс]. – [2006].– Режим доступа: http://www.vemp.ru/files/Asinxronn_elektrodvigateli.pdf
7. Информационный, измерительный и управляющий комплекс Decont. Руководство по эксплуатации [Электронный ресурс]. – [2005].– Режим доступа: http://www.dep.ru
8. Микроконтроллеры общего назначения для встраиваемых приложений производства ATMELCorp [Электронный ресурс]. – [2006].– Режим доступа: http://atmel.ru/Articles/ all.html
9. Программируемые контроллеры SIMATICS7-200[Электронный ресурс]. – [2006].– Режим доступа: http://www.automation-drives.ru/as/products/microsystems/index.php
10. Программируемые контроллеры SIMATICS7-300[Электронный ресурс]. – [2006].– Режим доступа: http://www.automationdrives.ru/as/products/simatic_s7/s7_300/index.php
11. ADAM-5000 Series: User's manual [Электронный ресурс]. – [2004].– Режим доступа: URL http://taiwan.advantech.com.tw/unzipfunc/Unzip/5000485%207th.pdf
12. Саргсян, А.Е. Сопротивление материалов, теории упругости и пластичности. Основы теории с примерами расчетов. Учебник /А.Е. Саргсян -М изд-во АСВ, 1998. - 240 с.
13. Преобразователи угловых перемещений ЛИР-112А. Технические условия[Электронный ресурс]. – [2005].– Режим доступа: http://www.skbis.ru/lib.php
14. Пускатели электромагнитные ПМН 12-025 [Электронный ресурс]. – [2005]. – Режим доступа: http://www.emko.ru/puskat/pm12_25.html
15. Схемы подключения термопреобразователей сопротивления [Электронный ресурс]. – [2005]. – Режим доступа: http://asp.tstu.ru/tfs/new/2/param.htm
16. http://www.metran.ru/rukovodstva/m200.pdf
|