Введение.
Характерная
черта научно-технического
прогресса,
определяющего
дальнейший
мощный подъём
общественно-технического
производства:
широкое внедрение
достижений
вычислительной
и микропроцессорной
техники во все
отрасли народного
хозяйства.
Решение задач
научно-технического
прогресса
требует применения
средств вычислительной
техники на
местах экономистов,
инженеров,
экономического
персонала.
В связи
с постоянным
возрастанием
масштабов
производства,
усложнением
экономических
связей, требований
научно-технической
революции в
народном хозяйстве
всё больше
возникают
потребности
в автоматизации
и компьютеризации
экономики
страны, что
является необходимым
условием для
выхода Украины
на мировой
рынок.
Особое
значение получает
разработка
автоматических
систем управления
технологическими
и производственными
процессами
и оснащения
их роботами-манипуляторами,
приборами
управления
и контроля.
Автоматизация
и роботизация
производства
— замена человеческого
труда трудом
машин, автоматов
и роботов позволяет
во много раз
повысить
производительность
труда и качество
продукции.
Внедрение
автоматизации
и роботизации
позволяет во
много раз повысить
проводить
различные
работы в тех
отраслях хозяйства,
где использование
человеческого
труда является
неприемлемым
из-за опасности
для жизни и
здоровья рабочих.
Кроме того,
точность выполнения
работы, производимой
машиной намного
выше точности
работы, выполненной
человеком, что
делает необходимым
применение
роботов и автоматов
при изготовлении
миниатюрной
и высокоточной
продукции.
Но
роботы и автоматы
— всего лишь
механизмы,
приводимые
в действие
механической
либо иным видом
энергии. Очевидно,
что для использования
этих механизмов
требуются
специальные
системы управления.
До изобретения
ЭВМ, эти функции
возлагались
либо на человека,
либо на сложные
и громоздкие
механические
системы, из-за
чего редко
удавалось
достичь высокой
точности, кроме
того, это требовало
больших затрат
финансовых
средств и энергии,
что приводило
к повышению
себестоимости
продукции.
Другой
стороной
научно-технического
прогресса
явилось развитие
науки, которая
является основой
для роста новых
технологий
и видов производства,
которые, в свою
очередь, стимулируют
развитие науки.
Нетрудно понять,
что с развитием
науки, всё более
усложняется
суть явлений,
рассматриваемых
ею, а, поскольку
практически
любое явление
можно анализировать
при помощи
математики,
то усложняются
и расчёты,
выполняемые
человеком.
Поэтому,
ещё с древнейших
времён человек
старался облегчить
процесс математических
вычислений.
Сначала для
этих целей
использовались
10 пальцев и
подручные
предметы, затем
— счёты, и, наконец,
с изобретения
в XVII
веке Блез Паскалем
первой суммирующей
и вычитающей
машины, начинается
история развития
вычислительной
техники. С
разработкой
в 1910 году первой
ЭВМ удалось
решить массу
проблем, особенно
в области
математических
и статистических
расчётов, которые
человек не мог
осуществить
с такой точностью
и скоростью,
которые обеспечивала
вычислительная
техника.
Первые
поколения ЭВМ
создавались
а основе электронных
ламп, затем —
транзисторов,
и, поэтому, из-за
своей высокой
стоимости не
находили широкого
применения.
Лишь
в 1959 году, когда
Р. Нойс изобрёл
микросхему,
значительно
снизилась
себестоимость,
потребляемая
мощность, габариты
и сложность
ЭВМ, что способствовало
их популяризации
и всеобщему
распространению,
особенно в
сфере управления
производством.
Достижения
микроэлектронной
технологии
позволило
значительно
расширить
возможности
всех классов
ЭВМ.
Простота
и гибкость
использования
компьютеров,
в большей мере
обусловлена
применением
программного
обеспечения,
что позволяет
быстро и с
наименьшими
затратами
изменить
предназначение
ЭВМ.
До
настоящего
времени были
разработаны
4 поколения
ЭВМ, причём
первые 3 уже не
используются.
Четвёртое
поколение ЭВМ,
созданное на
основе
сверхбыстрых
БИС способно
выполнять сотни
миллионов
операций в
секунду.
Успехи
в развитии
микропроцессоров
и микро-ЭВМ
ознаменовались
созданием
нового класса
средств вычислительной
техники —
персональных
компьютеров,
в которых удачно
сочетаются
удобство, малые
габариты, простота
использования
и широкая сфера
применения
со сравнительно
низкой стоимостью.
Использование
ПК во многих
случаях позволяет
повысить
продуктивность
и качество
труда. Такие
ЭВМ имеют довольно
понятный интерфейс,
благодаря чему
работа с ними
не требует
особой подготовки.
Широкий спектр
программного
обеспечения
даёт возможность
быстро изменить
назначение
данной ЭВМ.
Существует
и быстро пополняется
множество
различных
моделей
персональных
компьютеров.
В новых моделях,
которые предоставляются
пользователю,
возможности
быстро расширяются,
в первую очередь
за счёт увеличения
производительности
процессоров,
ёмкостей основной
и внешней памяти,
повышения
качества и
гибкости электронной
графики, качества
печати и т. д.
Сейчас,
наряду с
усовершенствованием
персональных
ЭВМ, широко
ведутся разработки
в области
искусственного
интеллекта,
который позволил
бы компьютеру
самостоятельно
принимать
решения, не
требуя при этом
вмешательства
человека.
Основой
для разработки
следующего
(пятого) поколения
ЭВМ станут всё
большая
миниатюризация
и внедрение
биотехнологий.
Принцип
работы любой
ЭВМ основан
на проведении
операций над
числами, представленными
двоичными (реже
— двоично-десятеричными
или другими)
кодами в виде
совокупности
низких и высоких
уровней напряжений
или токов. Также,
но значительно
реже, встречаются
ЭВМ, оперирующие
аналоговой
информацией.
Поэтому на
аппаратном
уровне ЭВМ
представлена
двумя видами
схем — комбинационными
логическими
схемами и цифровыми
автоматами,
структура
которых зависит
от того, какую
из составных
частей ЭВМ они
реализуют и
от назначения
ЭВМ в целом.
При
проектировании
ЭВМ и вычислительных
систем значительное
внимание придают
выбору операционных
блоков АЛУ для
реализации
заданных логических
и арифметических
операций
Развитие
электронной
вычислительной
техники, информатики
и применения
их средств и
методов в народном
хозяйстве,
научных исследованиях,
образовании
и иных сферах
человеческой
деятельности
является на
данный момент
приоритетным
направлением
развития
научно-технического
прогресса. Это
приводит к
необходимости
широкой подготовки
специалистов
по электронным
вычислительным
машинам, системам
и сетям, программному
обеспечению
и прикладной
математике,
автоматизированным
системам обработки
данных и управления,
а также другим
направлениям,
связанным с
интенсивным
использованием
вычислительной
техники. Всем
этим специалистам
необходимы
достаточно
глубокие знания
принципов
построения
и функционирования
современных
электронных
вычислительных
машин, комплексов,
систем и сетей,
микропроцессорных
средств, персональных
компьютеров.
Такие знания
необходимы
не только
специалистам
различных
областей
вычислительной
техники, но и
лицам, связанным
с созданием
программного
обеспечения
и применением
ЭВМ в различных
областях, что
определяется
тесным взаимодействием
аппаратных
и программных
средств ЭВМ,
тенденций
аппаратной
интеграции
системных и
специализированных
программных
продуктов, что
позволяет
достичь увеличения
продуктивности,
надёжности,
функциональной
гибкости, большей
приспособленности
вычислительных
машин и систем
к эксплуатационному
обслуживанию.
Заданием
на данный курсовой
проект является
проектирование
для некоторого
цифрового
автомата устройства
управления
на основе жёсткой
логики, формирующего
на десяти выходных
шинах последовательности
цифровых управляющих
сигналов по
заданным кодам
микрокоманд.
Введение.
Характерная
черта научно-технического
прогресса,
определяющего
дальнейший
мощный подъём
общественно-технического
производства:
широкое внедрение
достижений
вычислительной
и микропроцессорной
техники во все
отрасли народного
хозяйства.
Решение задач
научно-технического
прогресса
требует применения
средств вычислительной
техники на
местах экономистов,
инженеров,
экономического
персонала.
В
связи с постоянным
возрастанием
масштабов
производства,
усложнением
экономических
связей, требований
научно-технической
революции в
народном хозяйстве
всё больше
возникают
потребности
в автоматизации
и компьютеризации
экономики
страны, что
является необходимым
условием для
выхода Украины
на мировой
рынок.
Особое
значение получает
разработка
автоматических
систем управления
технологическими
и производственными
процессами
и оснащения
их роботами-манипуляторами,
приборами
управления
и контроля.
Автоматизация
и роботизация
производства
— замена человеческого
труда трудом
машин, автоматов
и роботов позволяет
во много раз
повысить
производительность
труда и качество
продукции.
Внедрение
автоматизации
и роботизации
позволяет во
много раз повысить
проводить
различные
работы в тех
отраслях хозяйства,
где использование
человеческого
труда является
неприемлемым
из-за опасности
для жизни и
здоровья рабочих.
Кроме того,
точность выполнения
работы, производимой
машиной намного
выше точности
работы, выполненной
человеком, что
делает необходимым
применение
роботов и автоматов
при изготовлении
миниатюрной
и высокоточной
продукции.
Но
роботы и автоматы
— всего лишь
механизмы,
приводимые
в действие
механической
либо иным видом
энергии. Очевидно,
что для использования
этих механизмов
требуются
специальные
системы управления.
До изобретения
ЭВМ, эти функции
возлагались
либо на человека,
либо на сложные
и громоздкие
механические
системы, из-за
чего редко
удавалось
достичь высокой
точности, кроме
того, это требовало
больших затрат
финансовых
средств и энергии,
что приводило
к повышению
себестоимости
продукции.
Другой
стороной
научно-технического
прогресса
явилось развитие
науки, которая
является основой
для роста новых
технологий
и видов производства,
которые, в свою
очередь, стимулируют
развитие науки.
Нетрудно понять,
что с развитием
науки, всё более
усложняется
суть явлений,
рассматриваемых
ею, а, поскольку
практически
любое явление
можно анализировать
при помощи
математики,
то усложняются
и расчёты,
выполняемые
человеком.
Поэтому,
ещё с древнейших
времён человек
старался облегчить
процесс математических
вычислений.
Сначала для
этих целей
использовались
10 пальцев и
подручные
предметы, затем
— счёты, и, наконец,
с изобретения
в XVII веке
Блез Паскалем
первой суммирующей
и вычитающей
машины, начинается
история развития
вычислительной
техники. С
разработкой
в 1910 году первой
ЭВМ удалось
решить массу
проблем, особенно
в области
математических
и статистических
расчётов, которые
человек не мог
осуществить
с такой точностью
и скоростью,
которые обеспечивала
вычислительная
техника.
Первые
поколения ЭВМ
создавались
а основе электронных
ламп, затем —
транзисторов,
и, поэтому, из-за
своей высокой
стоимости не
находили широкого
применения.
Лишь
в 1959 году, когда
Р. Нойс изобрёл
микросхему,
значительно
снизилась
себестоимость,
потребляемая
мощность, габариты
и сложность
ЭВМ, что способствовало
их популяризации
и всеобщему
распространению,
особенно в
сфере управления
производством.
Достижения
микроэлектронной
технологии
позволило
значительно
расширить
возможности
всех классов
ЭВМ.
Простота
и гибкость
использования
компьютеров,
в большей мере
обусловлена
применением
программного
обеспечения,
что позволяет
быстро и с
наименьшими
затратами
изменить
предназначение
ЭВМ.
До
настоящего
времени были
разработаны
4 поколения
ЭВМ, причём
первые 3 уже не
используются.
Четвёртое
поколение ЭВМ,
созданное на
основе сверхбыстрых
БИС способно
выполнять сотни
миллионов
операций в
секунду.
Успехи
в развитии
микропроцессоров
и микро-ЭВМ
ознаменовались
созданием
нового класса
средств вычислительной
техники —
персональных
компьютеров,
в которых удачно
сочетаются
удобство, малые
габариты, простота
использования
и широкая сфера
применения
со сравнительно
низкой стоимостью.
Использование
ПК во многих
случаях позволяет
повысить
продуктивность
и качество
труда. Такие
ЭВМ имеют довольно
понятный интерфейс,
благодаря чему
работа с ними
не требует
особой подготовки.
Широкий спектр
программного
обеспечения
даёт возможность
быстро изменить
назначение
данной ЭВМ.
Существует
и быстро пополняется
множество
различных
моделей персональных
компьютеров.
В новых моделях,
которые предоставляются
пользователю,
возможности
быстро расширяются,
в первую очередь
за счёт увеличения
производительности
процессоров,
ёмкостей основной
и внешней памяти,
повышения
качества и
гибкости электронной
графики, качества
печати и т. д.
Сейчас,
наряду с
усовершенствованием
персональных
ЭВМ, широко
ведутся разработки
в области
искусственного
интеллекта,
который позволил
бы компьютеру
самостоятельно
принимать
решения, не
требуя при этом
вмешательства
человека.
Основой
для разработки
следующего
(пятого) поколения
ЭВМ станут всё
большая миниатюризация
и внедрение
биотехнологий.
Принцип
работы любой
ЭВМ основан
на проведении
операций над
числами, представленными
двоичными (реже
— двоично-десятеричными
или другими)
кодами в виде
совокупности
низких и высоких
уровней напряжений
или токов. Также,
но значительно
реже, встречаются
ЭВМ, оперирующие
аналоговой
информацией.
Поэтому на
аппаратном
уровне ЭВМ
представлена
двумя видами
схем — комбинационными
логическими
схемами и цифровыми
автоматами,
структура
которых зависит
от того, какую
из составных
частей ЭВМ они
реализуют и
от назначения
ЭВМ в целом.
При
проектировании
ЭВМ и вычислительных
систем значительное
внимание придают
выбору операционных
блоков АЛУ для
реализации
заданных логических
и арифметических
операций
Развитие
электронной
вычислительной
техники, информатики
и применения
их средств и
методов в народном
хозяйстве,
научных исследованиях,
образовании
и иных сферах
человеческой
деятельности
является на
данный момент
приоритетным
направлением
развития
научно-технического
прогресса. Это
приводит к
необходимости
широкой подготовки
специалистов
по электронным
вычислительным
машинам, системам
и сетям, программному
обеспечению
и прикладной
математике,
автоматизированным
системам обработки
данных и управления,
а также другим
направлениям,
связанным с
интенсивным
использованием
вычислительной
техники. Всем
этим специалистам
необходимы
достаточно
глубокие знания
принципов
построения
и функционирования
современных
электронных
вычислительных
машин, комплексов,
систем и сетей,
микропроцессорных
средств, персональных
компьютеров.
Такие знания
необходимы
не только
специалистам
различных
областей
вычислительной
техники, но и
лицам, связанным
с созданием
программного
обеспечения
и применением
ЭВМ в различных
областях, что
определяется
тесным взаимодействием
аппаратных
и программных
средств ЭВМ,
тенденций
аппаратной
интеграции
системных и
специализированных
программных
продуктов, что
позволяет
достичь увеличения
продуктивности,
надёжности,
функциональной
гибкости, большей
приспособленности
вычислительных
машин и систем
к эксплуатационному
обслуживанию.
Заданием
на данный курсовой
проект является
проектирование
для некоторого
цифрового
автомата устройства
управления
на основе жёсткой
логики, формирующего
на десяти выходных
шинах последовательности
цифровых управляющих
сигналов по
заданным кодам
микрокоманд.
Общая
часть.
Преобразование
информации
в ЭВМ производится
электронными
схемами двух
типов: комбинационными
схемами и цифровыми
автоматами
(накапливающими
или последовательностными
схемами).
Более
сложный класс
преобразователей
дискретной
информации
составляют
цифровые автоматы.
ЦА в отличие
от комбинационной
схемы имеет
некоторое
конечное число
различных
внутренних
состояний.
Под
воздействием
входного слова
ЦА переходит
из одного состояния
в другое и выдаёт
выходное слово.
Выходное слово
в такте на выходе
ЦА в общем случае
определяется
входным словом,
поступившем
на вход автомата
в этот такт и
внутренним
состоянием
автомата, которое
явилось результатом
воздействия
на автомат
входных слов
в предыдущие
такты.
Комбинация
входного слова
и текущего
состояния
автомата в
данном случае
определяет
не только входное
слово, но и то
состояние, в
которое автомат
перейдёт к
началу следующего
такта.
В
ЭВМ в качестве
элементарных
автоматов
используются
главным образом
триггеры. Особенности
построения
цифровых устройств
связаны со
способом передачи
информации
между логическими
элементами.
Основные
понятия теории
автоматов.
В
данной части
курсового
проекта будут
рассмотрены
некоторые виды
цифровых автоматов,
принципы их
построения
и их различия,
в зависимости
от вида. Углубленная
проработка
данного вопроса
необходима
для оптимального
решения задания
курсового
проекта.
Термин
автомат, как
правило, используется
в двух аспектах.
В первом случае,
автомат
это устройство,
выполняющее
некоторые
функции без
непосредственного
участия человека.
Исходя из этого
определения,
можно сказать,
что ЭВМ — автомат,
так как после
загрузки программы
и исходных
данных ЭВМ
решает заданную
задачу без
участия
человека. Во
втором случае,
термин "автомат"
как математическое
понятие обозначает
математическую
модель реальных
технических
автоматов.
В этом аспекте
автомат представляется
как "чёрный
ящик", имеющий
конечное число
входов и выходов
и некоторое
множество
внутренних
состояний Q
= {q1(t),
q2(t)
... qn(t)},
в которые он
под воздействием
входных сигналов
переходит
скачкообразно,
т. е. практически
мгновенно,
минуя промежуточное
состояние. Но
это условие
идеализированно,
поскольку
очевидно, что
реальный переходный
процесс длится
конечное время.
Автомат
называется
конечным,
если множество
его внутренних
состояний
и множество
значений входных
сигналов —
конечные
множества.
В
практике часто
используется
понятие цифрового
автомата,
под которым
понимают устройство,
предназначенное
для преобразования
цифровой информации.
Входные
сигналы в цифровых
автоматах
представляются
в виде
конечного
множества
мгновенных
сигналов. В
целях упрощения
рассмотрения
процессов,
происходящих
в цифровых
автоматах,
поскольку все
события (состояния)
должны относиться
к фиксированному
моменту времени
t, то теоретически
считают, что
входные сигналы
не имеют длительности,
но реально это
не так. Условно
также принимается,
что число выходных
сигналов y(t)
конечно и они
возникают в
результате
действия входных
сигналов.
При этом следует
учитывать, что
одновременно
с появлением
выходного
сигнала происходит
скачкообразный
переход автомата
из состояния
q1(t)
в состояние
q2(t).
П
усть
имеется цифровой
автомат с одним
входом:
Рис.
1. Абстрактный
автомат с одним
входом
и одним
выходом
Математической
моделью цифрового
автомата является
абстрактный
автомат, заданный
совокупностью
шести объектов:
1) конечное
множество Х
входных сигналов
(входной алфавит
автомата):
Х={x1(t),
x2(t)
… хn(t)};
2) конечное
множество Y
выходных сигналов
(выходной алфавит
автомата):
Y={y1
(t), y2(t)
… yk(t)};
3) произвольное
множество Q
состояний
автомата:
Q={q1(t),
q2(t)
… qs(t)};
4) начальное
состояние
автомата q0,
как элемент
множества Q:
q0(t)Q;
5) функция
(q,
x) (функция
перехода
автомата из
одного состояния
в другое);
6)
функция (q,
х)
(функция
выходов
автомата).
Через
понятие "абстрактный
автомат" реализуется
некоторое
отображение
множества слов
входного алфавита
Х во множество
слов выходного
алфавита Y.
Понятие
состояния
автомата
используется
для описания
систем, выходы
которых зависят
не только от
входных сигналов
в данный
момент времени,
но и от некоторой
предыстории,
т. е. сигналов,
которые поступили
на входы системы
ранее. Состояние
автомата
соответствует
некоторой
памяти о прошлом,
позволяя устранить
время как
явную переменную
и выразить
выходные сигналы
как функцию
состояний и
входных сигналов.
Время
для цифрового
автомата имеет
также важное
значение.
Для решения
задач анализа
и синтеза цифровых
автоматов
обычно вводится
автоматное
время. Функционирование
автомата
рассматривается
через дискретные
интервалы
времени конечной
продолжительности
(интервал
дискретности).
Существует
два способа
введения автоматного
времени, по
которым цифровые
автоматы делят
на два класса.
В синхронных
автоматах
моменты времени,
в которых фиксируются
изменения
состояний
автомата, задаются
специальным
устройством
— генератором
синхросигналов,
выдающим импульсы
через равные
промежутки
времени (постоянный
интервал
дискретности).
В асинхронных
автоматах
моменты перехода
автомата из
одного состояния
в другое
заранее не
определены
и зависят от
каких-то событий.
В таких автоматах
интервал дискретности
является переменным.
Общая
теория автоматов
при сделанных
выше допущениях
разбивается
на две больших
части — абстрактную
теорию цифровых
автоматов
и структурную
теорию автоматов.
Различие между
ними заключается
в том, что в
абстрактной
теории мы отвлекаемся
от структуры,
как самого
автомата, так
и его входных
и выходных
сигналов.
Автоматы
классифицируют
по двум наиболее
распространенным
признакам:
1. Объем
памяти. Памятью
автомата
называют число
его состояний.
2. Механизм
случайного
выбора. В детерминированных
автоматах
поведение
и структура
автомата в
каждый момент
времени
однозначно
определены
текущей входной
информацией
и состоянием
автомата. В
вероятностных
автоматах они
зависят от
случайного
выбора.
В
теории автоматов
установлено,
что для осуществления
различных
преобразований
информации
совсем не обязательно
каждый раз
строить новые
автоматы: в
принципе это
можно сделать
на универсальном
автомате с
помощью программы
и соответствующего
кодирования.
В
теории автоматов
наиболее полно
описаны синхронные
автоматы. В
зависимости
от способа
определения
выходного
сигнала в
синхронных
автоматах
существует
две возможности:
1) выходной
сигнал y(t)
однозначно
определяется
входным
сигналом
x(t)
и состоянием
q(t-1)
автомата в
предшествующий
момент;
2) выходной
сигнал y(t)
однозначно
определяется
входным
сигналом
x(t)
и состоянием
q(t)
в данный момент
времени. Следовательно,
закон функционирования
абстрактного
автомата может
быть
задан следующим
образом:
для автомата
первого рода
q(t)=(q(t-1),
х(t)),
y(t)=(q(t-1),
x(t), t=1, 2…);
для
автомата второго
рода
q(t)=(q(y-1),
x(t)),
y(t)=(q(t),
x(t)), t=1,2...).
Для
каждого автомата
S
второго рода
существует
эквивалентный
ему абстрактный
автомат R
первого
рода,
функция
выходов которого
получается
в результате
подстановки
функции
переходов
автомата S
в его
сдвинутую
функцию выходов:
1(q,
x)=((q,
х), x).
Для
дальнейшего
изложения
примем, что
произвольные
автоматы первого
рода будут
называться
автоматами
Мили, а частный
случай автоматов
второго рода,
для которых
сдвинутая
функция выходов
(q,
х) не зависит
от второй переменной
х — автоматами
Мура.
Закон
функционирования
автоматов Мура
задается в
виде:
q(t)=(q-1),
x(t)),
y(t)=(q(t)).
В
отличие от
автомата Мили,
выходной сигнал
в автомате Мура
зависит только
от текущего
состояния
автомата и в
явном виде не
зависит от
входного сигнала.
Совмещенная
модель автомата
(C-автомат).
Абстрактный
C-автомат
— математическая
модель дискретного
устройства,
для которого
заданы следующие
параметры:
Q={q1
... qs}
—
множество
состояний;
X={x1(t)
... xn(t)}
—
входной
алфавит;
Y={y1(t)
...
yk(t)}
—
выходной
алфавит типа
1;
U={u1(t)
...
um(t)}
—
выходной
алфавит типа
2;
:QXQ
—
функция
переходов,
реализующая
отображение
D
QX
в Q,
l:QXY
—
функция
выходов, реализующая
отображение
D1
QX
на
У;
2:QU
— функция
выходов, реализующая
отображение
D2
Q
на U,
q0Q
—
начальное
состояние
автомата.
Р
ис.
2. Совмещённая
модель автомата
с одним входом
и двумя выходами.
Абстрактный
C-автомат
можно представить
в виде устройства
с одним входом,
на который
поступают
сигналы из
входного алфавита
X, и двумя выходами,
на которых
появляются
сигналы из
выходных
алфавитов Y
и U (рис. 2).
Отличие
C-автомата
от моделей Мили
и Мура состоит
в том, что
он одновременно
реализует две
функции выходов
1
и 2,
каждая из
которых характерна
для этих моделей
в отдельности.
Примером
ЦА могут служить
многосчётчиковые
бухгалтерские
автоматы "Аската".
Автомат
"Аската" относится
к группе машин
двухпериодного
действия, — за
первый период
осуществляется
набор цифр на
клавиатуре,
за второй —
печать цифровых
данных на бумаге
и подсчёт чисел
в счётчиках
машины.
Технические
характеристики
и эксплуатационные
данные автоматов:
количество
счётчиков, в
зависимости
от моделей —
от 3 до 55, три из
них — сальдирующие
для сложения
и сальдирования
итогов и 52 —
накапливающие
счётчики (регистры),
выполняющие
вычитание до
нуля. Отрицательное
содержание
этих счётчиков
может быть
записано
дополнительным
кодом. Все счетчики
автомата имеют
ёмкость 12-разрядного
десятеричного
арифметического
числа. Максимальная
ёмкость вводного
устройства
(цифровая клавиатура
и наборная
каретка) равна
10-разрядному
числу. Программирование
и управление
автоматом
осуществляется
при помощи
сменной шины
управления,
закреплённой
на подвижной
части каретки.
Итак,
проанализировав
вышеизложенную
информацию
можно определить
возможную сферу
применения
проектируемого
устройства:
оно может быть
использовано
для формирования
управляющих
слов при исследовании
какого-либо
синхронного
цифрового
автомата, например
на учебных
лабораторных
стендах, во-вторых,
не исключена
возможность
применения
данного устройства
в системах
автоматического
управления
технологическими
процессами,
где сигналы,
снимаемые с
выходной шины
могут подаваться
на различные
механизмы и
устройства,
либо на входы
ЦАП. Применение
устройства
в данной сфере
удобно тем, что
для начала
процесса необходимо
лишь запустить
счётчик, а остальные
операции будут
производиться
автоматически.
Кроме
того, это устройство
является наглядным
примером возможностей
использования
автоматики
и вычислительной
техники в народном
хозяйстве.
Специальная
часть.
3. 1.
Определение
задачи.
Из
задания на
курсовое
проектирование
определим суть
задачи: для
некоторого
синхронного
цифрового
автомата необходимо
спроектировать
устройство
управления
на основе жёсткой
логики, которое
в соответствии
с заданными
кодами микрокоманд
формирует на
выходной
десятиразрядной
шине управляющую
последовательность
цифровых сигналов.
3. 2. Разработка
структурной
схемы проектируемого
устройства.
Первым
шагом проектирования
устройства
является разработка
структурной
схемы.
Цифровой
автомат является
синхронным
цифровым устройством,
сохраняющим
своё значение
в каждом такте.
Следовательно,
для запоминания
состояния
цифрового
автомата в
устройстве
управления
должно быть
предусмотрено
наличие запоминающих
элементов —
триггеров.
Для
формирования
управляющих
сигналов, которые
выставляются
на выходной
шине устройства,
в соответствие
с кодом микрокоманды
в состав УУ
должна входить
комбинационная
логическая
схема — шифратор.
Для
обеспечения
УУ автоматического
последовательного
переключения
в 4 различные
состояния,
необходима
схема, обеспечивающая
формирование
сигналов обратной
связи, переводящие
УУ в следующее
состояние.
И
сходя
из определённых
выше требований,
структура УУ
может
выглядеть так:
3. 3. Разработка
функциональной
схемы устройства.
После
определения
структуры УУ
и функций каждым
элемента имеются
все необходимые
данные для
разработки
функциональной
схемы устройства.
Из
задания ясно,
что УУ должно
на выходной
шине формировать
управляющие
последовательности
кодов в соответствие
с кодами микрокоманд.
Следовательно,
для разработки
функциональной
схемы необходимо
определить
коды микрокоманд
и управляющих
последовательностей
по заданным
преподавателем
формулам.
Коды
микрокоманд
определяются
по формулам:
Nmk1=Nж+20
Nmk2=
Nmk1+2
Nmk3=
Nmk2+2
Nmk4=
Nmk3+2,
где Nж
— номер студента
по списку в
журнале, Nmk1,
Nmk2,
Nmk3,
Nmk4
— коды 4-х
микрокоманд.
Итак,
рассчитываем
коды микрокоманд,
исходя из того,
что Nж=21:
Nmk1=21+20=41D=101001B,
Nmk2=
41+2=43D=101011B,
Nmk3=
43+2=45D=101101B,
Nmk4=
45+2=47D=101111B.
Состояния
УУ фиксируются
и сохраняются
в параллельном
6-разрядном
регистре, построенном
на синхронных
JK-триггерах,
где вход J
переводит
триггер в состояние
(Q=1,Q=0),
а вход K
— в состояние
(Q=0,Q=1).
Запись информации
в триггер происходит
при наличии
сигналов либо
на входе
J, либо
на входе К
триггера и лишь
только в момент
действия тактирующего
импульса С
(C=1). Также
в триггерах
имеются инверсные
асинхронные
входыS
иR,
которые используются
при начальной
установке
триггеров в
исходное состояние
L1 (S=0),
либо L0
(R=0).
Поскольку
входыR
иS
инверсные,
то их срабатывание
происходит
в момент наличия
на них сигнала,
имеющего уровень
L0. Так как
эти входы асинхронны,
то они позволяют
устанавливать
триггер в исходное
состояние в
любой момент
времени, независимо
от уровня тактового
импульса C.
Сигналы
обратной связи,
определяющие
следующее
состояние
регистра, формируются
с помощью
дешифраторов
состояния
регистра (ДС).
Они выполняются
на логических
элементах И,
причём единичный
сигнал на выходе
каждого ДС
формируется
в ответ на некоторую
единственную
входную комбинацию.
Начальное
состояние
регистра определяется
кодом первой
МК и фиксируется
в регистре
путем установки
в состояние
единицы соответствующих
коду разрядов
регистра.
Установка
производится
сигналами
логического
нуля
(L0)
по асинхронным
входам
S.
При этом на
выходе дешифратора
состояния
регистра ДС1
формируется
сигнал обратной
связи, переводящий
регистр в следующее
заданное состояние,
соответствующее
коду микрокоманды
Nmk2.
В следующее
состояние
регистр переводится
с подачей
синхроимпульса.
После этого
формируется
сигнал обратной
связи уже на
выходе дешифратора
ДС2
и в регистр
помещается
код микрокоманды
Nmk3
и т. д. Сигналом
ДС4
регистр сбрасывается
в состояние
L0
по установочным
входам
R
через инвертор,
выполняющий
также роль
элемента задержки.
Шифратор
представляет
собой комбинационное
устройство
с шестью входами
и десятью выходами,
который преобразует
коды состояния
регистра в
коды выходных
управляющих
сигналов.
Синхронизирующее
устройство
состоит из
задающего
генератора
тактовой частоты
ЗГ
и ключа
, обеспечивающего
прохождение
синхроимпульсов
на регистр лишь
после установки
кода
Nmk1.
Ключевая схема
состоит из
асинхронного
вспомогательного
RS-триггера
Т7
и элемента И.
Триггер Т7
устанавливается
в состояние
L1
после подачи
сигнала с ДС1
и отпирает
ключ, выполненный
на элементе
И
— сигналы с ЗГ
поступают на
тактовые входы
регистра. Сигналом
с ДС4
триггер сбрасывается
в состояние
L0
и запирает ключ
на элементе
И,
после чего
прохождение
СИ на тактовые
входы регистра
прерывается.
Как
было определено
выше, код первой
микрокоманды
Nmk1=101001B.
Следовательно,
начальное
состояние
устанавливается
подачей сигнала
нулевого уровня
на S-входы
триггеров Т1,
Т4,
Т6
(S1,
S4,
S6).
Н
а
входы дешифратора
состояния
регистра подаются
сигналы прямых
либо инверсных
выходов триггеров,
в зависимости
от того,
на каком из них
в данный момент
имеется уровень
L0.
Соответственно
кодам состояния
УУ, дешифраторы
реализуют
следующие
функции:
Составим
таблицу переходов:
|
Код
состояния
|
Двоичный
код состояния |
Переход
|
Адрес
подачи сигнала
обратной связи |
Начало
|
000000 |
041
|
Вх.
S1,
S4, S6
|
| 41 |
101001 |
4143
|
ДС1
– J2
|
| 43 |
101011 |
4345
|
ДС2
– J3,
K2
|
| 45 |
101101 |
4547
|
ДС3
– J2
|
| 47 |
101111 |
470
|
ДС4
– R1,
R2, R3, R4, R5, R6
|
Из
записи двоичных
кодов состояний
41 и 43, видно, что
для перехода
из состояния
41 в состояние
43 необходимо
триггер второго
разряда Т2
перевести в
состояние L1
по входу J2.
Сигналы обратной
связи для остальных
переходов
определяются
аналогичным
образом. Следует
отметить, что
если на один
из входов сигнал
поступает
несколько раз,
то на этот вход
ставится элемент
ИЛИ с соответствующим
количеством
входов.
Далее
необходимо
разработать
схему шифратора.
На его вход
подаются сигналы
с выходов регистра
Q1, Q2,
Q3, Q4,
Q5, Q6,
а на выходах
формируются
десятиразрядные
кодовые управляющие
последовательности.
Значения
выходных сигналов
определяются
по формулам,
заданной
преподавателем.
Формула имеет
следующий вид:
УКП1=Nж+600,
УКП2=
УКП1+1,
УКП3=
УКП2+10,
УКП4=
УКП3+100,
где УКП1,
УКП2, УКП3, УКП4
— выходные
кодовые последовательности.
Определим их
значения (как
было указано
выше, Nж=21):
УКП1=21+600=621D=1001101101B,
УКП2=
621+1=622D=1001101110B,
УКП3=
622+10=632D=1001111000B,
УКП4=
632+100=732D=1011011100B.
Составляем
таблицу работы
шифратора:
| Код
сост. рег. |
X6 |
X5 |
X4 |
X3 |
X2 |
X1 |
Код
упр. сигн. |
Y10 |
Y9 |
Y8 |
Y7 |
Y6 |
Y5 |
Y4 |
Y3 |
Y2 |
Y1 |
| 41 |
1 |
0 |
1 |
0 |
0 |
1 |
621 |
1 |
0 |
0 |
1 |
1 |
0 |
1 |
1 |
0 |
1 |
| 43 |
1 |
0 |
1 |
0 |
1 |
1 |
622 |
1 |
0 |
0 |
1 |
1 |
0 |
1 |
1 |
1 |
0 |
| 45 |
1 |
0 |
1 |
1 |
0 |
1 |
632 |
1 |
0 |
0 |
1 |
1 |
1 |
1 |
0 |
0 |
0 |
| 47 |
1 |
0 |
1 |
1 |
1 |
0 |
732 |
1 |
0 |
1 |
1 |
0 |
1 |
1 |
1 |
0 |
0 |
| 0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
Таким
образом, получение
табличное
задание логических
функций Y10...Y1.
Для их реализации
их можно представить
в алгебраической
форме и, по
возможности
минимизировать
с помощью диаграмм
Вейча.
Однако,
после детального
рассмотрения
таблицы можно
прийти к выводу,
что некоторые
из функций
являются весьма
простыми и не
требуют дальнейшей
минимизации.
Так, видно, что
состояние
выходного
сигнала Y10
соответствует
состоянию
входных сигналов
X1,
X4
и X6.
Примем Y10=X1.
Далее, видно,
что выходной
сигнал Y9
не меняется
на протяжении
всех тактов
и имеет значение
L0, тогда
Y9=0.
Сигнал Y7
всегда равен
сигналу
Y10:
Y7=
Y10.
Из сопоставления
сигналов
Y8
и Y6
видно, что
Y6=Y8
и Y6=0
в случае сброса
устройства,
тогда: Y6=Y8X1.
Также можно
утверждать,
что Y5=X3.
Переключательные
функции же для
сигналов Y1,
Y2,
Y3,
Y4
и Y8
необходимо
минимизировать
при помощи карт
Карно. Для этого
необходимо
составить карту
Карно размером
88 ячеек,
поскольку
значения выходных
сигналов зависят
от 6-ти переменных,
то X3X2X1
откладывают
по столбцам,
а X6X5X4
— по строкам.
Строим
карту Карно
для переменной
Y1:

|
|
011
|
010
|
000
|
001
|
101
|
100
|
110
|
111
|
011
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
010
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
000
|
x
|
x
|
0
|
x
|
x
|
x
|
x
|
x
|
001
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
101
|
0
|
x
|
x
|
1
|
0
|
x
|
x
|
0
|
100
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
110
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
111
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
K1=X3X2
X1;
Y1=
K1=X3X2
X1.
Строим
карту Карно
для сигнала
Y2:

|
|
011
|
010
|
000
|
001
|
101
|
100
|
110
|
111
|
011
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
010
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
000
|
x
|
x
|
0
|
x
|
x
|
x
|
x
|
x
|
001
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
101
|
1
|
x
|
x
|
0
|
0
|
x
|
x
|
0
|
100
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
110
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
111
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
K1=X3
X2;
Y2=
K1=X3X2.
С троим
карту Карно
для сигнала
Y3: троим
карту Карно
для сигнала
Y3:
|
|
011
|
010
|
000
|
001
|
101
|
100
|
110
|
111
|
011
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
010
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
000
|
x
|
x
|
0
|
x
|
x
|
x
|
x
|
x
|
001
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
101
|
1
|
x
|
x
|
1
|
0
|
x
|
x
|
1
|
100
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
110
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
111
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
K1=
X2;
K2=X3X2
X1;
Y3
= K1+
K2=
X2+X3X2
X1.
Строим
карту Карно
для переменной
Y8
и минимизируем
её:

|
|
011
|
010
|
000
|
001
|
101
|
100
|
110
|
111
|
011
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
010
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
000
|
x
|
x
|
0
|
x
|
x
|
x
|
x
|
x
|
001
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
101
|
0
|
x
|
x
|
0
|
0
|
x
|
x
|
1
|
100
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
110
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
111
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
x
|
K1=
X3
X2;
Y1=
K1=
X3
X2.
Следует
отметить, функции
Y1
и Y3
имеют общий
минтермX3X2
X1, поэтому
Y3
можно выразить
как Y3=
X2+
Y1.
Т
аким
образом получены
следующие
логические
функции всех
выходных сигналов
шифратора,
имеющие вид:
Т
еперь,
по полученным
логическим
функциям можно
построить
шифратор.
3. 3. Разработка
принципиальной
схемы устройства.
После
построения
функциональной
схемы устройства
необходимо
реализовать
его на стандартных
элементах,
выпускаемых
отечественной
и зарубежной
промышленностью.
Для
разработки
принципиальной
схемы необходимо
использовать
стандартные
промышленные
микросхемы,
такие как:
JK-триггеры
с инверсными
асинхронными
входами, а также
простейшие
логические
микросхемы,
содержащие
элементы, реализующие
основные функции
булевой алгебры:
логические
элементы И,
ИЛИ,
а также элемент
ИЛИ-НЕ,
реализующий
функцию Пирса
и инверторы.
Для индикации
состояний
устройства
применены
светодиоды
и семисегментный
светодиодный
индикатор. В
качестве средств
управления
УУ применяются
микропереключатели
и микрокнопки.
В связи с многообразием
различных серий
стандартных
микросхем, в
составе которых
содержатся
вышеуказанные
необходимые
микросхемы,
отличающихся
по своим техническим
характеристикам,
и технологии
изготовления
при неизменности
своих функциональных
возможностей,
более подробно
осветим вопрос
выбора и обоснования
элементной
базы.
3.
4. Подбор элементной
базы.
При
выборе микросхем
для реализации
принципиальной
схемы разработанного
устройства
был проведен
анализ параметров
микросхем
различных серий
и структур,
выпускаемой
отечественной
промышленностью.
На
сегодняшний
день выпускается
множество серий
цифровых микросхем,
основным различием
которых является
тип применяемой
логики. Вообще
различают такие
основные технологии:
резисторно-связная
логика (РСЛ),
эмиттерно-связная
логика (ЭСЛ),
диодно-транзисторная
логика (ДТЛ),
транзисторно-транзисторная
логика (ТТЛ) и
др.
В
результате
проведенного
анализа было
принято решение
о целесообразности
применения
в данном устройстве
микросхем
технологии
ТТЛ,
поскольку
функциональный
набор микросхем
данной структуры
содержит все
необходимые
элементы для
разработанной
схемы. Ещё одно
достоинство
этой структуры
состоит в том,
что напряжение
питания для
всех серий
микросхем ТТЛ
одинаково, что
упрощает решение
вопроса питания
всего устройства.
Следующим
этапом подбора
элементной
базы являлся
анализ непосредственно
серий микросхем
ТТЛ
по их основным
параметрам.
В нижеследующей
таблице приведены
характеристики
основных параметров
микросхем
различных
серий:
Параметры
|
Серии
|
| К134 |
К155 |
К531
|
К555
|
|
Напряжения
питания,
В
|
5 |
5 |
5 |
5 |
| Время
задержки
распространения
сигнала, нс |
33
|
10
|
3
|
10
|
|
Потребляемая
мощность,
мВт
|
1
|
10
|
20
|
2
|
|
Емкость
нагрузки, пФ
|
50
|
15
|
15
|
15
|
|
Энергия
переключения,
пДж
|
33
|
100
|
60
|
20
|
|
Нагрузочная
способность,
|
10
|
10
|
10
|
20
|
После
проведенного
анализа было
принято решение
о применении
для разработанного
устройства
микросхем серии
К555. Такое решение
основано на
наибольшей
нагрузочной
способности,
наименьшей
энергии переключения
и малой потребляемой
мощности, что
делает применение
этой серии по
сравнению с
аналогами серий
К134, К155 и К531 наиболее
экономичным.
Далее
приведены
основные технические
характеристики,
принципиальные
схемы и количество
необходимых
микросхем,
примененных
в данном устройстве.
JK-триггер
с инверсными
асинхронными
входами.
П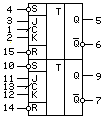
рименён
в блоке триггеров.
Микросхема
К555ТВ9
в количестве
3 штук.
| Тип
корпуса |
238.16-1 |
| Мин.
вых. напр. высокого
уровня |
2,7
В |
| Макс.
вых. напр. низкого
уровня |
500мВ |
|
Макс.
вх. ток высокого
уровня
|
80мкА |
| Макс.
вх. ток низкого
уровня |
800мкА |
| Макс.
ток потребления |
8мА |
| Напр.
питания |
5В |
| Технология |
ТТЛШ |
Элемент
2ИЛИ.
П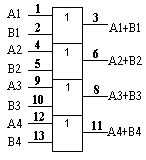
рименяется
в схеме шифратора.
Микросхема
К555ЛЛ1.
Содержит 4 элемента
2ИЛИ.
Необходимое
количество
— 1 штука.
| Тип
корпуса |
201.14
- 1 |
| Напряжение
питания |
5В |
| Макс.
ток низкого
уровня |
4,4мА |
| Макс. ток высокого
уровня |
1,6мА |
| Макс.
вых. напряжение
низкого уровня |
0,5В |
|
Мин.
вых. напряжение
высокого уровня,
В
|
2,7 |
| Макс.
вх. ток низкого
уровня |
0,36мА |
| Тип
корпуса |
201.14-1 |
| Технология |
ТТЛШ |
| Макс.
вх. ток высокого
уровня |
0,02мА |
|
Диапазон
рабочих температур
|
-10
- + 70С
|
| Масса |
1г. |
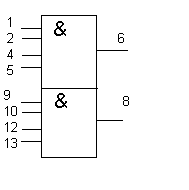
Элемент
4И.
Применяется
в качестве
дешифратора
состояния
регистра. Микросхема
К555ЛИ6.
Необходимое
количество
— 4 штуки. 1 микросхема
содержит 2 элемента
4И.
Соединение
элементов для
получения
необходимой
функции осуществляется
следующим
образом:
П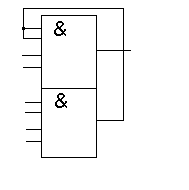
ринципиальная
схема микросхемы
имеет следующий
вид:
| Тип
корпуса |
201.14-8 |
| Мин.
вых. напр. высокого
уровня |
2,7
В |
| Макс.
вых. напр. низкого
уровня |
500мВ |
|
Макс.
вх. ток высокого
уровня
|
20мкА |
| Макс.
вх. ток низкого
уровня |
360мкА
|
| Макс.
ток потребления |
2,4мА |
| Напр.
питания |
5В |
Элемент
НЕ.
П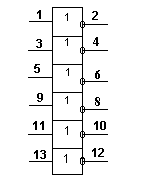
рименяется
в схемах шифратора,
а также как
элемент задержки
(на выходе ДС4)
и в других целях.
Микросхема
К555ЛН1.
Необходимое
количество
— 1 штука. 1 микросхема
содержит 6 элементов
НЕ
с открытым
коллектором.
Принципиальное
обозначение
схемы представлено
ниже:
| Технология |
ТТЛШ |
| Тип
корпуса |
201.14-8 |
| Мин.
вых. напр. высокого
уровня |
2,7
В |
| Макс.
вых. напр. низкого
уровня |
500мВ |
|
Макс.
вх. ток высокого
уровня
|
20мкА |
| Макс.
вх. ток низкого
уровня |
400мкА |
| Макс.
ток потребления
при высоком
уровне вых.
напр. |
2,4мА |
| Макс.
ток потребления
при низком
уровне вых.
напр. |
6,6мА |
| Напр.
питания |
5В |
Элемент
2И.
П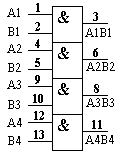
рименяется
в схеме шифратора
и в качестве
ключа в схеме
ЗГ.
Микросхема
К555ЛИ1.
Содержит 4 элемента
2И.
Для построения
схемы необходимы
2 микросхемы.
Ниже приведены
принципиальная
схема и технические
характеристики
микросхемы.
| Технология |
ТТЛШ
|
| Тип
корпуса |
201.14
- 1 |
| Напряжение
питания |
5 |
| Макс.
ток низкого
уровня |
не
более 8,8 |
| Макс. ток высокого
уровня |
не
более 4,4 |
| Макс.
вых. напряжение
низкого уровня |
не
более 0,5 |
|
Мин.
вых. напряжение
высокого
уровня, В
|
не
менее 2,7 |
| Макс.
вх. ток низкого
уровня |
не
более -0,36 |
| Макс.
вх. ток высокого
уровня |
не
более 0,02 |
|
Диапазон
рабочих температур
|
-10
- + 70С
|
| Масса |
1г. |
Асинхронный
RS-триггер.
Применяется
в ключевой
схеме ЗГ.
Микросхема
К555ТР2.
Содержит 4
асинхронных
RS-триггера
с инверсными
входами. Необходимое
количество
— 1 штука. Сигналы
будем подавать
на входы второго
триггера (R2
иS2).
Принципиальная
схема микросхемы
и её технические
характеристики
таковы:
|
Т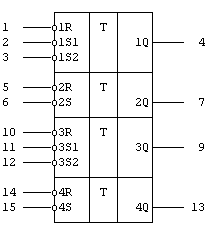
ехнология
|
ТТЛШ |
| Тип
корпуса |
238.16-2 |
| Мин.
вых. напр. высокого
уровня |
2,7
В |
| Макс.
вых. напр. низкого
уровня |
500мВ |
|
Макс.
вх. ток высокого
уровня
|
20мкА |
| Макс.
вх. ток низкого
уровня |
400мкА |
| Макс.
ток потребления |
7мА |
| Напр.
питания |
5В |
|
Диапазон
рабочих температур
|
-10
- + 70С
|
Питание
к микросхемам,
К555ЛЛ1, К555ЛИ1, К555ЛН1,
К555ЛИ6 подводится:
общий — 7, +5В — 14;
к
микросхемам
К555ТВ9, К555ТР2 — общий
— 8, +5В — 16.
Также
для контроля
и управления
работой устройства
использованы:
Светоизлучающие
диоды АЛ
307;
Семисегментный
светодиодный
индикатор
АЛС324;
Переключатель
МТ1;
Кнопка
МП1.
4. Расчётная
часть.
На этом
этапе проектирования
будет произведён
расчёт надёжности
устройства,
которая является
одним из важнейших
параметров
функционирования
любого электронного
устройства.
В
целом надёжность
устройства
определяется
надёжностью
каждого элемента
отдельно. Под
надежностью
понимают свойство
того или иного
объекта сохранять
во времени в
установленных
пределах значения
всех параметров,
характеризующие
нормальную
работоспособность
объекта.
Отказом
называется
полная или
частичная
утрата работоспособности
прибором. Главной
частью понятия
надёжности
является понятие
безотказности.
Безотказностью
называют свойство
прибора сохранять
работоспособность
в течение заданного
времени в
определенных
условиях
эксплуатации.
Увеличение
уровня интеграции
интегральных
микросхем ведет
к повышению
надежности
устройств за
счет сокращения
главным образом
паяных и контактных
соединений,
надежность
которых на
один-два порядка
ниже по сравнению
с надежностью
соединений
в корпусе ИС.
Причем по мере
совершенствования
технологии
число отказов
ежегодно падает
на 50-70 %. Современные
полупроводниковые
ИМС выдерживают
эксплутационные
нагрузки в
следующих
пределах: по
температуре
от -196 до +200С
по вибропрочности
и виброустойчивости
- до 100 в диапазоне
частот (2...5)*103
Гц. Надежность
обеспечивается
техническими
и организационно-техническими
мерами. Технические
меры обеспечения
надежности
содержат два
основных направления:
обеспечение
надежности
ИС и конструкций
РЭА. Организационно-технические
меры включают
в себя проектные
мероприятия.
Количественная
оценка надежности
производиться
с помощью различных
параметров.
Чаще всего
используется
интенсивность
отказов .
Данные
о надежности
ИМС определяются
по формуле:
=10-10(413+6,66Х+1,03У)[Ч-1];
где
Х —
число
элементов в
МС, У
— число
выводов в ИМС.
Если
время выражать
в часах, то единица
будет час в
минус первой
степени. Таким
образом, интенсивность
отказов определяется
как относительное
число элементов,
отказавших
за один час
работы. Также
необходимо
учесть надежность
соединений:
соединения
контактные
—
10-7
ч-1;
соединение
пайкой —
10-9
ч-1;
провода
печатные или
обычные в
расчете на
1мм —10-9
ч-1.
Для
определения
надежности
спроектированного
устройства
необходимо
знать надежность
всех использованных
микросхем.
Воспользовавшись
формулой определяют
отдельно надежность
каждой микросхемы:
К555ЛИ1:
=10-10(413+6,664+1,034)
4,410-8
ч-1;
К555ЛЛ1:
=10-10(413+6,664+1,034)
4,410-8
ч-1;
К555ЛН1:
=10-10(413+6,666+1,036)
4,410-8
ч-1;
К555ТВ9:
=10-10(413+6,662+1,034)
4,410-8
ч-1;
К555ТР2:
=10-10(413+6,664+1,034)
4,410-8
ч-1;
К555ЛИ6:
=10-10(413+6,662+1,032)
4,410-8
ч-1.
Для
получения
надежности
всей схемы
необходимо
сложить все
полученные
результаты
по расчетам
надежности
микросхем,
получив тем
самым общий
показатель
интенсивности
отказов данного
проектируемого
устройства:
=4,4*10-8*2+4,4*10-8+4,4*10-8+4,4*10-8*3+4,4*10-8+4,4*10-8*
*4=52,8*10-8=5,28*10-7ч-1.
Поскольку
надежность
проводов, дорожек
печатного
монтажа и соединения
пайкой выше
надежности
микросхем на
один-два порядка,
то ею можно
пренебречь,
общая надежность
узла полностью
определяется
величиной
надежности
ИМС и радиоэлементов.
5.
Эксплуатационная
часть.
В
данном разделе
будут приведены
сведения по
настройке,
контролю и
эксплуатации
устройства.
Разработанное
устройство
можно рассматривать,
как функционально
законченный
прибор и может
быть оформлено
как стенд для
наглядного
изучения процесса
работы ЦА.
С
Устройство
управления

Вход
(кнопка SB1)

.
.
.

Блок
светодиодных
индикаторов
(HL1…HL10)
труктурная
схема стенда
для контроля
и эксплуатации
прибора
имеет следующий
вид:
Блок
питания


5В
Генератор
тактовых импульсов


СИ

Счётчик
тактовых импульсов



Семисегментный
индикатор ТИ
Номер
ТИ
Питание
устройства
осуществляется
от стабилизированного
источника
питания напряжением
5 В.
Для
отображения
информации
используется
блок из десяти
светоизлучающих
диодов АЛ307Б
(HL1…HL10),
которые отображают
выходные состояния
ЦА на соответствующих
выходах.
При
эксплуатации
устройства
могут возникнуть
некоторые
неисправности,
список и методика
устранения
которых приведены
ниже.
|
Не
светится один
или несколько
светодиодных
индикаторов
|
1.Проверить
исправность
светодиодов.
2.
Проверить
исправность
логических
элементов,
подающих сигнал
на данный
индикатор.
|
|
Схема
не работает
после включения
питания
|
Проверить
наличие напряжения
в сети.
Проверить
наличие питающего
напряжения
на выходах
блока питания.
Если таковое
отсутствует
— проверить
сетевой шнур
блока питания.
При целостности
последнего
— неисправность
в источнике
питания
Проверить
напряжение
на входах схемы.
При его отсутствии
возможно
повреждёны
соединительные
провода, питающие
устройство.
|
|
Состояние
схемы не меняется
после нажатия
кнопки SB2.
|
Проверить
состояние
кнопки.
Проверить
наличие сигналов
на установочных
входах триггеров.
При их отсутствии
— проверить
работоспособность
инвертора.
Проверить
наличие сигналов
на выходах
триггеров.
При их отсутствии
— неисправность
триггеров.
Проверить
элементы схемы
шифратора.
|
|
Схема
не переходит
в следующее
состояние.
|
Проверить
наличие тактовых
импульсов.
При их отсутствии
— проверить
уровень сигнала
на входе ключевой
схемы ЗГ.
При их наличии
— проверить
состояние
элемента И
и ЗГ.
Проверить
наличие сигнала
на S-входе
триггера. При
его наличии
— проверить
исправность
RS-триггера.
При отсутствии
сигнала —
проверить
исправность
дешифратора
кода состояния
регистра.
Проверить
исправность
триггеров.
Проверить
исправность
схемы дешифратора.
|
Для
наладки и устранения
неисправностей
устройства
понадобится
следующее
лабораторное
оборудование:
Осциллограф;
Вольтметр;
Милливольтметр;
Омметр;
Миллиамперметр;
Также
при ремонте
устройства
может понадобиться
электропаяльник
и различный
электромонтажный
инструмент.
6. Техника
безопасности.
При
эксплуатации
любого электронного
прибора имеется
опасность
поражения
электрическим
током. Поэтому,
во избежания
случаев поражения
следует неукоснительно
придерживаться
правил техники
безопасности
при работе с
электроборудованием,
соответствующих
ГОСТ.
Несмотря
на то, что источник
питания модулей
устройства
имеет низкое
и, следовательно,
безопасное
выходное напряжение,
это не исключает
возможности
поражения
электрическим
током. Наличие
в источнике
питания силового
трансформатора,
первичная
обмотка которого
подключена
к напряжению
220В, а также пользование
электрифицированным
инструментом
и измерительными
приборами,
питающимися
от сети 220В, создают
дополнительную
опасность
электротравм.
Кроме того,
всегда следует
помнить о возможности
получения
ожогов при
пайке.
Поэтому
для создания
безопасных
условий сборки
спроектированного
устройства
необходимо
соблюдать
следующие
правила по
технике безопасности:
Рабочее
место должно
быть оборудовано
вытяжной
вентиляцией,
пол покрыт
резиновым
ковриком, а
само рабочее
место- линолеумом.
Освещенность
рабочего места
должна соответствовать
установленным
нормам.
В
помещении
должна быть
аптечка.
В
помещении на
видном месте
должны быть
вывешены правила
техники безопасности.
Электрические
паяльники
должны работать
при напряжении
не более 36В и
иметь специальную
подставку,
исключающую
возможность
случайного
касания его
нагретой части.
В
случае использования
технологии
травления
печатных плат
необходимо
предусмотреть
меры, исключающие
ожоги и выделения
вредных газов
от применяемых
химических
реактивов.
Рабочие
напряжения,
токи и мощности
не должны превышать
максимально
допустимых.
Желательно
снижать рабочую
температуру
прибора. Если
она на 10С
ниже предельной,
то число отказов
снизится в
двое.
Рекомендуется
защищать устройство
от перенапряжений.
Для этого должны
применяться
схемы стабилизации
напряжения
питания.
Пайку
выводов нужно
выполнять не
ближе 10 мм от
корпуса в течение
не более 5с. При
этом необходимо
осуществлять
отвод тепла
между корпусом
и местом пайки,
используя для
этой цели
плоскогубцы
или пинцет.
Не
рекомендуется
крепить элементы
только на выводах.
Большинство
микросхем
"боятся" воздействия
электростатических
зарядов, попадающих
на их выводы.
Заряды статического
электричества
легко возникают
при трении
многих синтетических
материалов
широко используемых
в быту, поэтому
необходимо
применять меры,
предупреждающие
попадание
зарядов на
выводы микросхем.
С этой целью
следует соблюдать
следующие
правила:
Не
касаться выводов
микросхем
металлическими
предметами,
щупами тестера
или пальцами.
Паяльник,
корпуса измерительных
приборов, рабочий
инструмент,
а также полоска
шины питания
0В на плате
монтируемого
модуля должны
быть заземлены
при помощи
гибкого провода,
подключенного
к заземлению
через резистор
1 мОм.
Монтаж
микросхемы,
установленной
на плате, нужно
начинать с
монтажа выводов
питания (сперва
0В, а затем +5В).
Особую осторожность
следует соблюдать
при подключении
проводников
к выводам
микропроцессора.
Помимо
электростатических
зарядов, для
микросхем
опасен перегрев.
Если при пайке
допустить
перегрев выводов
микросхем, то
это приводит
к резкому ухудшению
ее параметров,
а часто и выходу
из строя. Не
следует паять
два вывода,
расположенных
рядом. Выполнив
пайку одного
вывода, нужно
переходить
к пайке вывода,
расположенного
на противоположной
стороне корпуса
микросхемы.
Для
микросхем
недопустимы
переполюсовки,
в виде ошибочного
включения
вывода «+» питающего
напряжения
вместо вывода
«-», и наоборот.
Известную
опасность
создает отклонение
величины питающего
напряжения.
Допускается
изменение
напряжения
в пределах +5
%. При меньшем
напряжении
микросхема
будет давать
сбои в работе,
при большем
— может выйти
из строя.
МЕРЫ
ПРОТИВОПОЖАРНОЙ
БЕЗОПАСНОСТИ.
Кроме
опасности
поражения
электротоком
существует
ещё и опасность
пожара в результате
возгорания
схемы, вызванного
длительным
перегревом
либо коротким
замыканием
токоведущих
частей. Опасность
пожара существует
также и при
неосторожным
обращении с
измерительным
оборудованием,
а особенно —
с паяльником.
При
эксплуатации
устройства
необходимо
строго соблюдать
правила пожарной
безопасности:
Не
включать устройство
в электросеть,
напряжение
в которой не
соответствует
норме.
Не
оставляйте
включенное
устройство
без присмотра.
Розетка
подключения
вилки шнура
питания устройства
должна находиться
в доступном
месте для быстрого
отключения
устройства
от сети.
ПОМНИТЕ!
Пренебрежение
одним из вышеуказанных
правил может
привести к
перегреву
устройства,
к преждевременному
выходу его из
строя и даже
возгоранию!
Если
в устройстве
произошло
возгорание,
то его необходимо
немедленно
обесточить
и накрыть плотной
тканью, чтобы
прекратить
доступ свежего
воздуха, принять
меры к тушению
возгорания.
Выводы.
Курсовой
проект является
заключительным
этапом изучения
предмета
"Компьютерная
электроника
и схемотехника".
Целью выполнения
курсового
проекта является
более углублённое
изучение работы
устройств ЭВМ,
методов их
анализа и синтеза,
знакомство
со справочной
литературой,
правилами
оформления
чертежей и
другой документации
в соответствии
с требованиями
ЕСКД.
Проектирование
устройств ЭВМ
— сложный и
трудоёмкий
творческий
процесс, который
систематизирует,
закрепляет
и совершенствует
теоретические
знания, позволяя
студентам
проявить свои
творческие
способности
в области синтеза
узлов ЭВМ и
является формой
проверки
подготовленности
студента к
выполнению
дипломного
проекта.
Работа
над КП предусматривает
целенаправленную,
и систематическую
работу студента
рассчитанную
на приобретение
практических
и теоретических
навыков в плане
последних
достижений
науки и техники
в области РЭО
и ЭВТ.
В
данной работе
было спроектировано
устройство
управления
синхронным
цифровым автоматом.
В
процессе выполнения
проекта мною
была проведена
значительная
работа по определению
и минимизации
логических
функций, построению
функциональных
и принципиальных
схем, подбору
элементной
базы и расчётам
надёжности,
также был проведен
анализ возможных
неисправностей
и технологии
их устранения,
в результате
чего я получил
более глубокие
знания в области
схемотехники,
применения
ИМС, а также
приобрёл практические
навыки, необходимые
мне в процессе
моей дальнейшей
трудовой
деятельности.
Использованная
литература:
Хоровец
П., Хилл У. Искусство
схемотехники.
М. Мир., 1984.
Техническое
описание и
методические
рекомендации
по основам
автоматики
и ЭВТ. Профессор
Ямпольский
В.С. Омск 1990
Титце
Х., Шенк К. Полупроводниковая
схемотехника.
Перевод с немецкого.
Шило
В.Л. Популярные
цифровые микросхемы:
Справ.-
Челябинск:
Металургия,
1988.
Цифровые
интегральные
микросхемы:
Сравочник/
М.И. Богданович,
И.Н. Грель, С.А.
Дубина и др. -
2-е изд., Мн.:
Беларусь,
Полымя 1996
Батушев
В.А., Вениаминов
В.Н., Ковалев
В.Г. Микросхемы
и их применение.
- М.:
Радио
и связь, 1988.
Полупроводниковые
приемно-усилительные
устройства:
Справочник/
Р.М.
Терещук, К.М.
Терещук, С.А.
Седов К.:
"Наукова
думка" 1981
Интегральные
микросхемы:
справочник,
второе издание
под редакцией
Б. В. Тарабрина
М.: Энергатомиздат,
1985.
Содержание:
Введение 2
Общая
часть 4
Специальная
часть 13
3. 1.
Определение
задачи. 13
3. 2. Разработка
структурной
схемы проектируемого
устройства. 13
3.
3. Разработка
функциональной
схемы устройства. 14
3. 4. Разработка
принципиальной
схемы устройства. 21
3. 5. Подбор
элементной
базы. 21
Расчётная
часть 30
Эксплуатационная
часть 32
Техника
безопасности 35
Выводы 38
Использованная
литература 39
|