| МГТУ им. Н.Э. Баумана
РЕФЕРАТ
Москва 1999
Храповые механизмы находят широкое применение в шаговых двигателях, грузоподъемных устройствах и различных отраслях техни
ки. Храповой механизм — устройство, допускающее вращение оси в одном направлении и исключающее вращение этой же оси в противоположном направлении. Он состоит из храпового колеса и собачки. Собачка 1 обычно прижата к колесу пружиной 2
(рис. 1). Реже используют храповые механизмы, в которых собачка взаимодействует с поступательно перемещающейся рейкой. Храповые колеса и собачки изготовляют из сталей 35, 50, У10А, 15Х, 20Х, 25ХГСА. При значительных нагрузках, а также для уменьшения износа их либо подвергают объемной закалке, либо цементируют, а затем закаливают. В приборах храповые колеса изготовляют также из латуней ЛК80-Э и ЛС63-3 и бронзы Бр.КМцЗ-1.
Иногда и собачки изготовляют из латуни. Используют также сплавы алюминия.
Пружины храпового механизма создают момент, прижимающий собачку к храповому колесу. Однако этот момент не предназначен для преодоления сил и моментов, которые могут действовать на собачку от храпового колеса. Усилие пружины оказывается для этой цели недостаточным. Оно лишь вводит собачку в зацепление с храповым колесом. Поэтому положение оси С
собачки выбирают с таким расчетом, чтобы окружная сила F
и вызываемая ею сила трения F
обеспечивали появление равнодействующей силы Fn
,
момент которой на плече Са
прижимал бы собачку к храповому колесу, а не выводил ее из зацепления (рис. 1). Это достигается в том случае, если угол a положения оси собачки больше угла j трения. Для обеспечения этого неравенства необходимо удалить ось С
собачки от оси храпового колеса (см. собачку, показанную выше колеса). Однако при этом следует опасаться переброса собачки на другую сторону храпового колеса, особенно после некоторого износа собачки. В таких случаях храповой механизм может срываться. Поэтому недопустимо и слишком большое удаление оси С
собачки от оси храпового колеса. У собачки, показанной слева от
| 
|
колеса, для надежного функционирования храпового механизма также необходимо выполнять неравенство к
>
j,
что может быть обеспечено, когда ось, наоборот, находится ближе к оси колеса, а собачка сделана достаточно длинной. При этом момент силы Fn
прижимает собачку к храповому колесу. Соответствующее направление нормальной силы Fn
можно обеспечить поднутрением
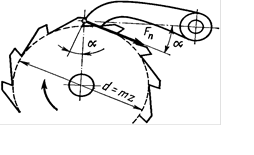
передней грани зубьев храпового колеса на угол a. Тогда ось собачки может располагаться на касательной к средней окружности зубьев храпового колеса (рис. 2). Для обеспечения прижатия собачки к зубьям храпового колеса в этом случае необходимо, чтобы угол поднутрения
был больше угла трения. Часто a выбирается равным 10°. У этой конструкции при малом окружном шаге зубьев зуб храпового колеса получается ослабленным.
Окружная сила, действующая на диаметре d
храпового колеса, F
=
2M
/d,
где М
—
крутящий момент на ос
и храпового колеса; d —
диаметр впадин зубьев храпового колеса, d
==
mz
; z
—
число зубьев храпового колеса; т
—
модуль, т
=
pt
/p
, р
t
—
окружной шаг зубьев храпового колеса по окружности впадин. На основании расчета по среднему допускаемому давлению можно определить модуль зубьев храпового колеса:
| 
Рис. 3
|
где [p]—
допускаемое давление на единицу ширины зуба храпового колеса; определяется по справочнику; y =
b/т,
b —
ширина колеса.
На рис. 3 показана конструкция храповика часового механизма. Вместо храпового колеса использовано обычное колесо с зубьями часового профиля. Это упростило конструкцию, так как сократилось число колес в механизме. Собачка 1
имеет несколько выступов и удерживается на оси винтом 4.
На рис. 3, а
показано положение собачки относительно колеса 2
при подзаводке
часов. Момент М
зав
отводит собачку, которая одним из своих выступов непрерывно прижимается под действием пружины 3
к зубьям колеса 2,
п
ропуская их. Выступ собачки захватил конец Д
пружины 3,
деформируя последнюю. Конец Г
пружины закреплен неподвижно. На рис. 3, б показано стопорящее положение собачки, когда она удерживает колесо 2.
Зуб колеса упирается в один из выступов собачки. При переходе из положения а
в положение б
храповое колесо немного поворачивается, благодаря чему ослабляется напряжение заводной пружины после ее тугого завода. Это способствует увеличению срока службы заводной пружины и стало возможным благодаря применению собачки с несколькими выступами.
| 
|
| 
|
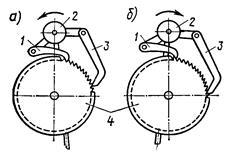
Храповые механизмы могут обеспечивать преобразование вращательного движения в колебательное или наоборот. На рис. 4 показана конструкция храпового механизма электрических часов, в которой толкающие собачки 1
и 3
преобразуют качания якоря 2
в прерывисто-вращательное движение храпового колеса 4.
При движении якоря как в прямом, так и в противоположном направлениях собачки попеременно захватывают и толкают зубья храпового колеса (рис. 4, а,
6).
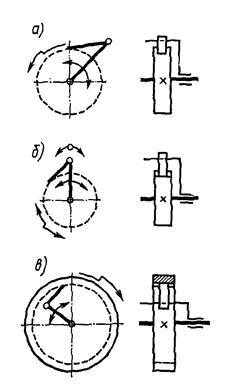
На рис. 5 даны условные обозначения храповых механизмов для схем (ГОСТ 2.770—68): а
—
односторонний храповой механизм с наружным зацеплением; б
—
двусторонний храповой механизм с наружным зацеплением; в
—
односторонний храповой механизм с внутренним зацеплением.
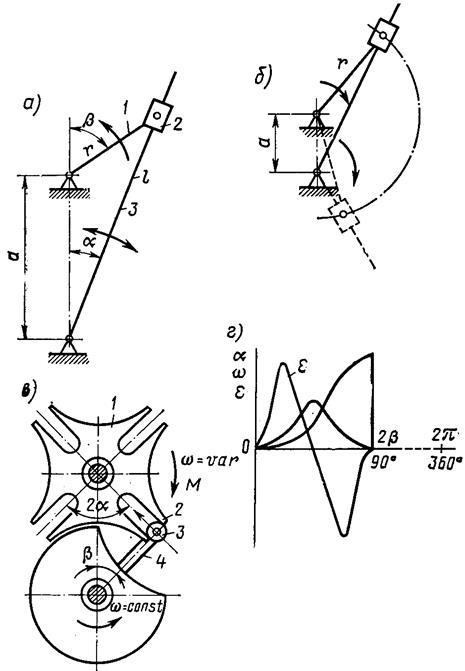
Кулисный механизм (рис. 6, а)
наиболее часто применяют для преобразования вращательного движения кривошипа 1
в качательное
движение кулисы 3.
Камень кулисы 2
перемещается вдоль нее по направляющим. Кулисные механизмы могут быть использованы также для преобразования равномерного вращательного движения в неравномерное вращательное движение при а
<
r
(рис. 6, б).
Кулисы с камнем применяют также в тангенсных
,
синусных и других механизмах для замены высших кинематических пар низшими.
Зависимость угла поворота a кулисы от угла поворота b кривошипа (рис. 6, а)
такова:
tg a = r sin b/(a + r cos b)
После дифференцирования этого выражения по времени и преобразований получаем выражение для угловой скорости кулисы
w3
=w1
r(a cos b + r)/(a2
+ r2
+2 a r cos b)
где w3
=
d
a/dt ; w1
=
d
b/dt =
const. Отсюда передаточное отношение
i12
=
w1
/w2
=
(
a2
+
r
2
+
2 a r cos b )/[r(a cos
b + r)]. Диффе
ренцируя
по времени выражение для w
3
, получаем угловое ускорение кулисы e3
=d2
a/dt2
.
.
После преобразований
Наиболее характерным является применение кулисных механизмов в устройствах для получения прерывистого движения, например в разнообразных производственных автоматах, работающих по определенному циклу, в киноаппаратуре и др. В таких устройствах используют мальтийский крест (рис. 6, в).
Лопасти 2
креста, имеющие пазы, представляют собой кулисы. Число лопастей не менее 3. При вращени
и кривошипа 4
поворот креста происходит только тогда, когда цевка
3
кривошипа перемещается в пазу лопасти креста. Крест поворачивается на угол 2a при повороте кривошипа на угол 2b. На угле поворота кривошипа 2p—2b крест неподвижен. Характер изменения кинематических параметров движения креста (рис. 6, в)
—
угла поворота a, угловой скорости w и углового ускорения e — показан на рис. 6, г.
|