ВВЕДЕНИЕ
Искусственные нейронные сети, или нейронные компьютеры, появились практически одновременно с компьютерами Фон-неймановской архитектуры. Они являлись одной из возможных ветвей развития вычислительной техники. Но благодаря простоте реализации с помощью технических средств того времени в этой гонке победила Фон-неймановская архитектура, а нейронные сети на какое-то время были забыты. Но с совершенствованием технологии производства элементной базы и с достижением теоретических пределов производительности компьютеров с традиционной архитектурой о нейронных сетях вспомнили и в последнее время нейронные сети, и нейрокомпьютеры получили второе дыхание.
Идея нейронных сетей была позаимствована у природы, а точнее в качестве аналога использовалась нервная система животных и человека. Нервная система состоит из огромного количества достаточно простых элементов – нейронов. Каждый нейрон получает сигналы от тысяч других нейронов и передает обработанную информацию тысячам других нейронов по одному единственному выводу. Нейроны связаны между собой в достаточно сложную и идеально настроенную систему. Высокое быстродействие данной системы, пока не достижимое для современных компьютеров, обеспечивается за счет параллельности обработки информации. Сравнительно медленные нейроны обрабатывают входящую информацию одновременно, но благодаря большому их количеству достигается огромное быстродействие (табл. 1).
Длительный период эволюции придал мозгу человека много качеств, которые отсутствуют как в машинах с архитектурой фон Неймана, так и в современных параллельных компьютерах. К ним относятся:
- массовый параллелизм;
- распределенное представление информации и вычисления;
- способность к обучению и способность к обобщению;
- адаптивность;
- свойство контекстуальной обработки информации;
- толерантность к ошибкам;
- низкое энергопотребление.
Можно предположить, что машины, построенные на тех же принципах, что и биологические нейроны, будут обладать перечисленными характеристиками.
Интеллектуальные системы на основе искусственных нейронных сетей (ИНС) позволяют с успехом решать проблемы распознавания образов, выполнения прогнозов, оптимизации, ассоциативной памяти и управления.
Таблица 1. Машина фон Неймана по сравнению с биологической нейронной системой
| Машина фон Неймана |
Биологическая нейронная система |
| Процессор |
Сложный |
Простой |
| Высокоскоростной |
Низкоскоростной |
| Один или несколько |
Большое количество |
| Память |
Отделена от процессора |
Интегрирована в процессор |
| Локализована |
Распределенная |
| Адресация не по содержанию |
Адресация по содержанию |
| Вычисления |
Централизованные |
Распределенные |
| Последовательные |
Параллельные |
| Хранимые программы |
Самообучение |
| Надежность |
Высокая уязвимость |
Живучесть |
| Специализация |
Численные и символьные oперации |
Проблемы восприятия |
| Среда функционирования |
Строго определенная |
Плохо определенная |
| Строго ограниченная |
Без ограничений |
Нейронные сети применяются для решения целого ряда задач, которые традиционными линейными методами трудно решаемы, или даже вообще не решаемы. На практике нейросети используются в двух видах – как программные продукты, выполняемые на обычных компьютерах, и как специализированные аппаратно-программные комплексы. В первом случае не используется встроенный параллелизм нейросетевых алгоритмов. Для многих задач, в т.ч. приложениях при анализе и обобщении баз данных, особенного быстродействия и не требуется: для них вполне хватает производительности современных универсальных процессоров. В этих приложениях используется исключительно способность нейросетей к обучению, к извлечению скрытых в больших массивах информации закономерностей. Для второй группы приложений – обработки сигналов в реальном времени, параллелизм нейровычислений является критическим фактором. Потребность в выполнении большого объема исследовательских работ и быстром функционировании появившихся прикладных систем привели к появлению специализированных вычислительных устройств для эффективного моделирования нейронных сетей – нейрокомпьютеров.
Перечислим основные задачи, решаемые нейронными сетями:
-Распределенная ассоциативная память;
-Распознавание образов;
-Адаптивное управление;
-Прогнозирование;
-Экспертные системы;
-Оптимизация (т.е. поиск максимума функционала при наличии ограничений на его параметры),
-Кластеризация, категоризация.
Эти задачи можно эффективно внедрять в космонавтике, механике, металлургии и т.д.
В настоящее время самые различные отрасли промышленности и народного хозяйства находятся в условиях нестабильности. Нестабильность характеризуется существенными нереализуемыми резервами в экономии затрат, связанными с издержками производства.
Без преувеличения можно сказать, что металлургия является одним из китов, на которых стоит современная технологическая цивилизация. Это положение делает её весьма привлекательной для внедрения новых технологий, способных ускорить исследования в направлении получения новых перспективных сплавов, повысить качество и безопасность способов получения выплавляемого металла, понизить его стоимость.
Наиболее сильно это проявляется в энергонасыщенном производстве, когда малейшее отклонение от оптимального режима сопровождается огромными экономическими издержками.
Один из начальных этапов производства стали – процесс подготовки железорудного сырья для выплавки металла (металлизация) сложен и зависит от огромного количества факторов, что требует постоянной и напряжённой работы оператора (диспетчера).
В процессе производства металлизованных окатышей имеются технологические ситуации, характеризующиеся частыми перестройками и переналадками, пусками и остановами шахтных печей, хаотичным изменением производительности, характеристик сырья, ограниченностью ресурсов во времени и энергоресурсов, непредсказуемостью целевых установок управления и т.д. Тем самым процесс является весьма перспективным для внедрения нейротехнологий.
1. ТЕОРЕТИЧЕСКАЯ ЧАСТЬ
1.1 ВЫБОР ОБЪЕКТА ИССЛЕДОВАНИЙ
1.1.1 Обзор процессов металлизации
Несмотря на масштабность производства стали по схеме "доменная печь – конвертер", в последние два десятка лет в мире наблюдается устойчивая тенденция развития процессов прямого получения железа и его последующего использования по схеме "шахтная печь металлизации - электродуговая печь" [1]. Причины такого резкого развития бескоксовой металлургии очевидны, не раз отмечались в литературе и в данной работе не рассматриваются.
Наиболее важными с точки зрения оценки состояния и перспектив развития рассматриваемой технологии получения первичного железа являются классификации по масштабам применения различных способов и по виду используемого для металлизации руды восстановителя (см. Приложение 1) [1,16].
Анализ различных способов металлизации предполагает определенную их классификацию по наиболее характерным признакам [1,15,16,17]. Достаточно полно различные способы могут быть представлены следующей классификацией: по физико-химическим основам технологических схем; по применяемым агрегатам; по виду используемой энергии; по виду восстановителя; по способам подготовки сырых материалов; по состоянию получаемого продукта (см. Приложение 3).
Кратко рассмотрим шесть основных процессов металлизации, которые стали традиционной технологией производства стали: "ХиЛ-I" "Мидрекс", "Пурофер", "Армко", "НСК" и "ХиЛ-Ш" (см. Приложение 2).
При разработке этих процессов основным стимулом было стремление получать железо (сталь) без применения коксующегося угля, который становился все более дефицитным, и создавать промышленные металлургические агрегаты без таких больших капиталовложений, какие необходимы в обычной коксовой металлургии.
Поскольку все эти процессы достаточно широко известны, здесь следует только отметить некоторые характерные различия между ними и попытаться объяснить, почему они получили такое разное признание.
Общим для всех процессов этой группы является то, что оксид железа в форме кусковой руды или окатышей, или их смеси, вводят в восстановительный реактор. При этом оказалось, что для точного управления работой реактора очень важное значение имеют гранулометрический состав, восстановимость или химический состав (содержание двухвалентного железа Fe2+
, основность и т.д.), склонность к слипанию, склонность к разрушению, прочность на сжатие. Только специальная подготовка сырых материалов могла обеспечить удовлетворительный режим работы агрегатов и высокий коэффициент их использования.
Другим общим признаком технологических процессов рассматриваемой группы является применение природного газа для получения восстановительного газа, хотя во всех этих процессах может применяться (а отчасти и применяется) также и альтернативное сырье — нефть, коксовый газ и уголь (после его газификации). Однако по соображениям экономичности и (или) надежности эксплуатации основным сырьем при проектировании установок все же считался природный газ.
Общим для всех способов, кроме "ХиЛ-I," (см. П.2. Рис. 1.), является применение шахтной печи, причем только по способу "Мидрекс" удалось применить динамический газовый затвор без движущихся конструктивных элементов, а во всех остальных процессах используют повышенное давление газа в системе, вследствие чего нужны шлюзы для руды (аналогичные засыпным аппаратам доменных печей) и соответствующие устройства для выгрузки готового продукта [1,15].
Охлаждение губчатого железа по способам "Мидрекс", НСК и "ХиЛ-I" осуществляется в соответствующей зоне (по способу НСК — в отдельном резервуаре) циркулирующим потоком охлаждающего газа. Содержание углерода в готовом продукте определяется химическим составом этого циркулирующего газа. По способу "Армко" (см. П.2. Рис. 2.) охлаждающий газ вместе со свежим восстановительным газом поступает в зону восстановления.
В системе шахтной печи по способу "Пурофер" и НСК никакого охлаждения не предусматривается. Горячий готовый продукт выгружают в закрываемые резервуары и в них доставляют к установке горячего брикетирования, можно также загружать губчатое железо в горячем виде непосредственно в электропечи.
С 1983 г. и в процессе "Мидрекс" в качестве варианта предусмотрена выдача продукта из восстановительной печи через шлюз без охлаждения с последующим горячим брикетированием. Получение губчатого железа в брикетированной форме оказывается все более выгодным, потому что при этом удается удачно решить проблемы, связанные с его транспортировкой на большие расстояния (самовозгорание, выделение пыли) [1,15,17].
Для получения восстановительного газа из природного применяются различные системы. Так, по способам "ХиЛ-1", "Армко" и "ХиЛ-Ш" используют конверсию паром (паровой риформинг), хорошо зарекомендовавшую себя в нефтехимии. При этом подводимый газ должен быть достаточно полно очищен от серы [доля серосодержащих компонентов не должна превышать 10-4
% (объемн.)], чтобы кристаллизатор в паровых реформерах (на никелевой основе) не был отравлен.
Газ, использованный в восстановительной шахте, не поступает в оборотный цикл (по способу "ХиЛ-Ш" в оборотный цикл вводится лишь небольшая его часть), но используется для обогрева реформера (парового конвертера) и выработки пара. Чтобы получить высокий восстановительный потенциал газа после паровой конверсии, нужно поддерживать возможно более низкое отношение пар — углерод (способ "Армко"). Другой способ достижения той же цели заключается в обезвоживании конвертированного газа путем его охлаждения (для конденсации влаги) с последующим нагревом (способы "ХиЛ- I" и "ХиЛ- Ш").
По способу НСК (см. П.2. Рис. 3.) газ, полученный паровой конверсией, смешивается с циркулирующим колошниковым газом, причем благодаря конденсации влаги и отмывки от СО2
из колошникового газа получается высококачественный восстановительный газ.
В процессе "Мидрекс" (см. П.2. Рис. 4.) применен принцип конвертирования диоксидом углерода с рециркуляцией колошникового газа. Диоксид углерода, содержавшийся в колошниковом газе, вместе с его остаточной влагой (при промывке колошникового газа в скруббере водой в нем задается определенное содержание H2
О) используются как кислородоносители для конверсии природного газа.
По всем способам рассматриваемой группы для оптимизации расхода энергии применяют более или менее глубокий теплообмен для утилизации отходящего тепла. Впрочем, при конверсии диоксидом углерода по способам этой группы можно получить самый низкий расход энергии [1].
В процессе "Пурофер" (см. П.2. Рис. 5.) для получения восстановительного газа из природного применён регенеративный принцип. Пока один из горизонтальных регенераторов нагревается за счет сжигания колошникового газа с добавкой природного до температуры ~ 1400 °С, во втором регенераторе происходит превращение смеси колошникового газа с природным в восстановительный газ. В расположенной далее камере охлаждения температуру восстановительного газа устанавливают на уровне 950 ± 10 °С. При таком крекинге природного газа при высокой температуре требуется лишь небольшая масса катализатора, нечувствительного к сернистым компонентам, содержащимся в природном или колошниковом газе.
В качестве варианта в процессе "Пурофер" предусмотрено получение восстановительного газа из такого углеродоносителя, как тяжелый мазут, который расщепляют путем частичного окисления (по способу "Тексако") и затем отмывают в скруббере от СО2
(монозтанол-амином), как и колошниковый газ, а после очистки подогревают в газоподогревателе до температуры восстановления.
По старейшему из процессов рассматриваемой группы "ХиЛ-I" (см. П.2. Рис. 1.) в восстановительном аппарате, как известно, применяют неподвижный слой. Шихту нагревают циклически в четырех ретортах и последовательно подвергают предварительному восстановлению, полному восстановлению, охлаждению и науглероживанию, затем материал выгружают и реторты наполняют новой порцией. Циклический процесс требует, кроме сравнительно большого расхода тепла, и значительные издержки на аппаратурную оснастку, что неблагоприятно сказывается на коэффициенте использования оборудования и эксплуатационных затратах. Поэтому фирма "Охалата и Ламина" с середины 70-х годов начала работать над созданием непрерывного процесса, который к концу 70-х годов получил известность как процесс "ХиЛ-Ш".
1.1.2 Выводы
Наибольшее развитие получили процессы "ХиЛ-I" и "Мидрекс". На их долю в сумме приходится более 80 % всех мощностей установок прямого восстановления в мире [1,16]. Двум этим процессам принадлежит соответственно наиболее высокая доля фактически выпускаемого губчатого железа.
По данным на 1990 г. на установках прямого восстановления, проекты которых будут реализованы в ближайшем будущем, предполагается осуществление процессов "ХиЛ-Ш", "Мидрекс" и НСК.
Анализ современного состояния бескоксовой металлургии в мире, тенденций и перспектив ее развития показывает, что возможно дальнейшее увеличение объема металлизованного сырья, особенно в регионах, обладающих ресурсами дешевых энергоносителей [1]. Основная часть (85 %) металлизованного продукта в мире производится по технологиям Мидрекс и ХИЛ-Ш. И хотя установки Мидрекс занимают лидирующее положение, технология ХИЛ в последние годы развивается быстрее.
В России эти технологии металлизации железорудных окатышей впервые были реализованы в установке ХИЛ-Ш на Лебединском ГОКе, производящей горячее брикетированное железо. А ещё раньше (1983 г.) пущены четыре установки металлизации по способу "Мидрекс" на Оскольском Эектрометаллургическом Комбинате (ОЭМК) [1].
Технологическое оборудование для процесса "Мидрекс" по сравнению с оборудованием для трех других конкурирующих процессов отличается простотой и высокой надежностью. Хотя работа ведется лишь с очень небольшим избыточным давлением в технологических циклах циркулирующего газа, удельная производительность в восстановительном реакторе, т.е. в шахтной печи, получается такой же или даже более высокой, чем при конкурирующих способах (см. П.1., П.2.). Кроме того, производственные показатели первой более крупной установки, которая начала работать на заводе в Контркёр, свидетельствовали о том, что возможности дальнейшего усовершенствования и повышения производительности процесса "Мидрекс" еще не исчерпаны.
Выбор процесса "Мидрекс" для рассмотрения в данной работе явился логическим следствием выше проведённого анализа. Все ссылки, ниже используемые данные и факты по процессу "Мидрекс" взяты из опыта ОЭМК.
1.2 ОПИСАНИЕ ЦЕХА МЕТАЛЛИЗАЦИИ
1.2.1 Модули прямого восстановления
В соответствии с полной мощностью ОЭМК мощность цеха металлизации была установлена равной 5 млн. т. металлизованного продукта в год. Мощность первого этапа первой очереди развития цеха металлизации была принята равной 1,667 млн. т губчатого железа в год, т.е. из 12 модулей, запроектированных для полного развития комбината, на первом этапе построены и работают в данный момент первые четыре [1].
В составе каждого модуля имеются: участок шахтной печи металлизации, участок реформера, система производства инертного газа, система аспирации.
Система водного хозяйства, свеча, помещение пульта с контрольно-измерительными приборами, а также электроснабжение выполнены общими для каждой пары модулей.
1.2.2 Печь металлизации
Восстановительная печь (см. Приложение 4) состоит из загрузочного (промежуточного) бункера, верхнего динамического затвора с загрузочным распределителем и загрузочными труботечками, зоны восстановления, промежуточной зоны, зоны охлаждения, огнеупорной футеровки, постоянно действующих питателей, нижнего динамического затвора и маятникового питателя (для выгрузки готового продукта).
1.2.3 Скруббер колошникового газа
В состав скруббера входят следующие узлы:
- труба Вентури, в которой колошниковый газ из шахтной печи, поступающий вертикально сверху вниз, интенсивно смачивается и охлаждается;
- насадка, в которой газ и вода движутся в противотоке через элементы насадки так, что газ охлаждается до температуры охлаждающей воды;
- зумпф, расположенный под насадкой, куда смывается смоченная пыль;
- циклонный каплеотделитель, в котором избыточная вода отделяется от чистого газа.
Компрессоры технологического и охлаждающего газа
Для повышения давления технологического и охлаждающего газов применены двухроторные винтовые компрессоры. Оси обоих роторов располагаются в корпусе параллельно. Вал ротора, не имеющего прямого привода, приводится во вращение через синхронизирующую зубчатую передачу так, что оба ротора вращаются без контакта между собой. Валы обоих роторов опираются на подшипники качения. В каждом компрессоре предусмотрена система циркуляционной масляной смазки под давлением.
1.2.4 Скруббер охлаждающего газа
По конструкции и принципу действия скруббер охлаждающего газа аналогичен скрубберу колошникового газа. В нем только нет разделительной стенки в насадке и второго циклонного каплеотделителя, поскольку поток очищенного охлаждающего газа подается на всасывание соответствующего компрессора без его разделения на две части.
1.2.5 Реформер
Корпус реформера представляет собой газоплотную сварную, стальную конструкцию длиной 41, шириной 11 и высотой 9 м, разделенную на 12 секций. Поскольку рабочая температура составляет 1100 ˚С, стальная конструкция защищена огнеупорной футеровкой. В реформере имеется 288 реакционных труб, размещенных вертикально в четыре ряда по 72 трубы в каждом ряду так, что в одной секции располагаются 24 трубы, обогреваемые на длине 8 м. Отверстия для прохода через днище и свод корпуса реформера уплотнены.
Трубы реформера заполнены катализатором. Газ проходит через них снизу вверх. Смешанный газ, подогретый до 400 ˚С, входит в трубы снизу, конвертированный газ выходит из верхних концов труб с температурой 900˚С и поступает в футерованные коллекторные трубопроводы.
Реформер отапливается с помощью установленных с днища в пять рядов 120 главных горелок и 36 вспомогательных. Главные горелки работают на топливном газе - смеси колошникового газа с природным, и на воздухе, подогретом до 600 ˚С. Во вспомогательных горелках сжигается природный газ холодным воздухом.
Катализатор, загружаемый в трубы реформера, состоит из материалоносителя (например, глинозема высокой чистоты) и активного компонента. В большинстве случаев в качестве катализатора для реакции конверсии применяется никель в различных концентрациях.
1.2.6 Рекуператор
В каждом модуле прямого восстановления имеются два рекуператора. По направлению потока дымовых газов в них расположены следующие конструктивные узлы: радиационный трубчатый рекуператор для подогрева воздуха (прямотоком дымового газа и воздуха), камера поворота дымового газа, двухходовой конвективный рекуператор для подогрева воздуха (перекрестно-противоточная схема), двухходовой конвективный рекуператор для подогрева смешанного газа (перекрестно-противоточная схема), двухгодовой конвективный рекуператор для подогрева природного газа (перекрестно-противоточная схема).
Эти узлы размещены в несущей стальной конструкции, покрытой герметичным стальным кожухом и опирающейся на бетонные фундаменты и опоры.
1.2.7 Свеча
Для модулей прямого восстановления 1 и 2 и для модулей 3 и 4 предусмотрено по одной свете. На свечу сбрасывают для дожигания газы в основном из предохранительных клапанов, скрубберов колошникового и охлаждающего газов, концевого холодильника технологического газа, холодильника конвертированного газа, фильтра природного газа (у модулей), а также с некоторых станций регулирования давления природного газа. Состав этих газов в соответствии с их происхождением различен. Для проектирования свечи были приняты за основу характеристики топливного газа.
1.3 МЕТАЛЛИЗАЦИЯ ЖЕЛЕЗА В ШАХТНОЙ ПЕЧИ
1.3.1 Краткое описание процесса "Мидрекс"
При восстановительном процессе "Мидрекс" (см. Приложение 5) оксид железа в форме окатышей или кусковой руды превращается в высокометаллизованный продукт, пригодный для производства электростали, например в дуговой печи [1,15,17]. Восстановительный процесс проводится в шахтной печи (см. Приложение 4), в которой горячий восстановительный газ реагирует в противотоке с рудой, опускающейся под действием силы тяжести. Процесс протекает при температуре ниже точки размягчения шихтовых материалов. В качестве восстановительного газа используются водород и монооксид углерода (СО), которые образуются из природного газа в газовом конверторе (реформере).
Здесь развиваются ,в основном, следующие химические реакции:
1) восстановление
Fe2
O3
+ 3H2
® 2Fe + 3H2
O;
Fe2
O3
+ 3CO ® 2Fe + 3CO2
;
2) образование карбида железа
3Fe + 2CO ®Fe3
C + CO2
;
3) конверсия
CH4
+ H2
O ®CO + 3H2
;
CH4
+ CO2
® 2CO + 2H2
;
Горячий колошниковый газ, выходящий из верхней части шахты восстановительной печи, охлаждается и очищается в соответствующем скруббере и разделяется на два потока: технологический газ и топливный газ.
Технологический газ сжимается в компрессорах, смешивается с природным газом, очищенным от серы, подогревается в рекуператорах и конвертируется в реформере в присутствии никелевого катализатора, превращаясь в конвертированный газ. Конверсия представляет собой, в основном, расщепление природного газа при воздействии кислородсодержащих газов СО2
и Н2
О на продукты распада Н2
и СО. При этом объем газа увеличивается на 30%. Избыточный газ, образовавшийся в результате увеличения объема - топливный колошниковый газ - смешивается с природным газом и сжигается в главных горелках реформера. Тепло от сжигания топливного газа покрывает значительную часть теплопотребления реформера. Недостающую часть тепла получают от сжигания некоторого количества природного газа.
Горячий металлизованный продукт, опускающийся из зоны восстановления, охлаждается в нижерасположенной зоне охлаждающим газом. Нагревшийся охлаждающий газ затем охлаждается и очищается в скруббере, сжимается в соответствующем компрессоре и снова подается в зону охлаждения. Металлизованный продукт выгружается при помощи маятникового питателя.
При альтернативном режиме работы (AFS) колошниковый газ после скруббера и последующего компримирования подается в зону охлаждения, где он охлаждает горячее губчатое железо. При прохождении через насыпной слой газ отдает содержащиеся в нем соединения серы охлажденному губчатому железу.
Все этапы описываемого процесса проходят под небольшим избыточным давлением. Сырье поступает в восстановительную печь через шлюз с динамическим газовым затвором, а готовый продукт выгружается из печи через другой аналогичный шлюз. Проникновение воздуха предотвращается тем, что в шлюзы с газовым затвором вдувается инертный газ под давлением, несколько превышающим давление в точках соединения шлюзов с печью, при этом не применяют никаких движущихся деталей.
Чтобы описать функционирование процесса, целесообразно разделить его энергоснабжение на пять оборотных циклов и систем. Имеются в виду следующие циклы и системы:
а) Цикл восстановительного газа: печь металлизации, скруббер колошникового газа, компрессоры и холодильник технологического газа, реформер, рекуператор и холодильник конвертированного газа после реформера.
б) Цикл охлаждающего газа: нижняя часть печи металлизации (зона охлаждения), скруббер и компрессор охлаждающего газа и каплеотделитель.
в) Система инертного газа: подача инертного газа в уплотнения при нормальной работе, подача продувочного газа и аварийная система подачи инертного газа.
г) Система водоснабжения: сгуститель, градирни, насосы и прочие вспомогательные устройства.
д) Система аспирации: отсасывающие зонты, трубопроводы запыленного воздуха и радиальный скруббер (промыватель).
Разумеется, во всех системах имеются трубопроводы, измерительные устройства и регуляторы, многочисленная арматура и вспомогательные устройства.
1.3.2 Цикл восстановительного газа
В печи металлизации протекают собственно процессы восстановления. Твердые материалы поступают сверху в реактор, работающий под давлением, и покидают его снизу, выходя из пространства с избыточным давлением в окружающую среду. Твердые материалы (окисленные окатыши) опускаются в печи под действием силы тяжести по мере того, как на нижнем конце печи они выгружаются (уже в виде металлизованного продукта) в заданном режиме при помощи специального устройства для выгрузки - так называемого маятникового питателя. Одновременно горячий восстановительный газ, вдуваемый через сопла примерно на середине высоты шахтной печи при температуре ~ 760 °С и абсолютном давлении ~ 0,2 МПа, движется навстречу потоку окатышей вверх, где и выходит из печи уже как колошниковый газ при температуре ~ 400°С и абсолютном давлении ~ 0,13 МПа. Для предотвращения выхода из печи горючих газов, находящихся под избыточным давлением, устройства для загрузки окисленных окатышей и выгрузки металлизованного продукта уплотнены при помощи так называемых газовых динамических затворов. В эти затворы вдувается инертный (затворный) газ под таким давлением, которое обеспечивает движение этого газа в труботечках загрузки и выгрузки только внутри печи, т.е. только вниз - на колошнике, где загружаются окисленные окатыши, и только вверх - на разгрузке, где выгружаются металлизованные окатыши. Затворный газ представляет собой отходящие из реформера обезвоженные продукты сгорания, содержание кислорода в которых поддерживается на уровне 0,5-1 %.
Время пребывания окатышей в зоне восстановления при проектной производительности модуля устанавливается таким, чтобы достигалась средняя степень металлизации в пределах 90-94 %.
Развитие различных реакций процесса металлизации - восстановления гематита до магнетита и далее до вюстита железа, и образования карбида железа, в принципе зависит от температуры восстановительного газа, его химического состава и времени пребывания газа и твердых материалов в восстановительной печи. Химический состав окисленных окатышей существенно влияет на кинетику восстановительных процессов.
Для управления восстановительным процессом используются в основном следующие взаимозависимости:
1. Повышение содержания СО2
в восстановительном газе снижает его восстановительную способность.
2. Повышение содержания СН4
в восстановительном газе охлаждает слой окатышей и повышает восстановительную способность газа при достаточно высокой температуре.
3. Увеличение отношения Н2
/СО в восстановительном газе охлаждает слой окатышей.
Внизу зоны восстановления наряду с восстановлением происходит и науглероживание металлизованного продукта, в котором углерод появляется преимущественно в форме карбида железа. На содержание углерода можно повлиять следующими практическими мероприятиями:
- изменением содержания метана в восстановительном газе путем добавки природного газа к охлажденной части конвертированного газа;
- увеличением содержания метана в охлаждающем газе, с тем чтобы заданное количество CH4
поступало в переходную зону и из нее - в зону восстановления.
В нижней части печи металлизации (ниже переходной зоны и вплоть до нижнего динамического затвора) происходит охлаждение металлизованного продукта.
Горячий запыленный колошниковый газ входит в скруббер сверху через трубу Вентури, где при подаче большого количества воды происходит резкое охлаждение газа и одновременно смачивание частиц пыли. Над поверхностью промывочной воды конусной части скруббера газ совершает поворот на 180°, вследствие чего смоченные частицы пыли вместе с большей частью капелек охлаждающей воды отбрасываются силой инерции в воду. При дальнейшем движении газа вверх через насадку скруббера он охлаждается почти до температуры охлаждающей воды. Доля газа, необходимая для реформинга (технологический газ), выходит из скруббера насыщенной водяными парами при температуре ~ 55 °С. Избыточный газ (топливный газ) должен быть возможно более полно обезвожен, поэтому он орошается в насадке скруббера промывочной водой, имеющей возможно более низкую температуру. При длительной непрерывной работе температура топливного газа может достичь 30°С. Чтобы можно было получить различные температуры газа, промывочная насадка скруббера разделена промежуточной перегородкой на зону технологического газа и зону топливного газа.
Нагретая и загрязненная пылью вода из труб Вентури и с насадки скруббера поступает в конус скруббера и оттуда передается далее в систему грязной воды. Содержание пыли в чистом газе при нормальной чистой насадке скруббера составляет в среднем ~ 5 мг/м3
. Потеря напора в скруббере для промывки колошникового газа равна ~10 кПа.
Компрессоры технологического газа обеспечивают циркуляцию технологического газа, причем суммарная потеря напора в этом цикле при полной нагрузке и равномерном ходе печи составляет 12¸14 кПа и для поддержания заданного избыточного давления давление на стороне всасывания компрессоров обычно составляет 12 кПа. Для процесса "Мидрекс" хорошо зарекомендовали себя выносливые и почти не нуждающиеся в обслуживании винтовые (двухроторные) компрессоры. Это обусловлено, в первую очередь, их характеристикой (такие компрессоры относятся к гидрообъемному типу, т.е. нагнетаемый объем почти не зависит от колебаний давления), а также их нечувствительностью к высокому и меняющемуся содержанию свободной воды во всасываемом газе и хлопьям пыли, которые иногда захватываются газом. Компрессоры работают с впрыскиванием воды, которая поглощает тепло, образующееся при сжатии, и предотвращает появление образований на роторе. Они снабжены электроприводами с постоянной частотой вращения, поэтому для регулирования расхода газа предусмотрена байпасная линия, через которую избыточное количество газа возвращается из цикла технологического газа обратно в скруббер колошникового газа.
В концевом холодильнике технологический газ с заданной точностью насыщается водяными парами благодаря орошению насадки, через которую газ проходит снизу вверх. Температура воды устанавливается в соответствии с температурой газа, измеренной после холодильника.
Для процесса "Мидрекс" характерно получение восстановительного газа в реформере [1]. Термокаталитическая конверсия протекает по реакциям:
CH4
+ H2
O ® CO + 3H2
;
CH4
+ CO2
® 2CO + 2H2
;
При этом на катализаторе устанавливается равновесие реакции водяного газа:
CO+ H2
O = CO2
+ H2
;
Для процесса "Мидрекс" типично, что в качестве кислородоносителя для конверсии, кроме (сравнительно небольших количеств) водяного пара, используется в первую очередь диоксид углерода - составная часть колошникового газа. Смешанный газ (природный + технологический) перед процессом конверсии подогревается (в рекуператоре) до температуры ~ 400 °С и затем конвертируется на никелевом катализаторе с одновременным нагревом до ~ 900 °С. При этом происходит увеличение объема. В скруббере колошникового газа избыточный газ выделяется из цикла технологического газа и используется как топливный. Теплота его сгорания используется для покрытия потребности в тепле эндотермических реакций конверсии.
При паровой конверсии обычные катализаторы реакции расщепления природного газа отличаются высокой чувствительностью к сере, в то время как при процессе "Мидрекс" допустимы и более высокие содержания серы в смешанном газе. Если заданное предельное содержание серы (например, ~0,0014% в природном газе) превышается лишь эпизодически и незначительно, то временное отравление катализатора (проявляющееся в снижении производительности) является обратимым и устранится самопроизвольно, если содержание серы в циркулирующем газе спустя короткое время вновь снизится до нормального уровня.
Обычными источниками поступления серы являются железная руда и природный газ. При использовании обожженных окисленных окатышей сера, содержащаяся в руде, становится безвредной, что соответствует условиям. Для очистки природного газа от серы предусмотрена установка десульфурации, описание которой в работе не приводится.
Процесс конверсии протекает в вертикальных реакционных трубах реформера, заполненных катализатором, газ через которые течет снизу вверх. Трубы расположены в футерованном газоплотном, стальном корпусе. Система подовых горелок, расположенных между трубами реформера, обеспечивает теплом эндотермический процесс. В главных горелках сжигается часть потока колошникового газа, к которому добавляется небольшое количество свежего природного газа.
В дополнение к описанной выше главной системе горелок отопления реформера имеется независимая вспомогательная система работающих на природном газе горелок, расположенных тоже между рядами труб в днище реформера. Вспомогательная система горелок рассчитана, так, чтобы реформер (газовый конвертор) можно было нагреть без нагрузки до заданной рабочей температуры и поддерживать во время перерывов в работе на этом уровне.
Поскольку в дымовом газе реформера при его нормальной работе содержание кислорода получается низким, он может быть использован для получения инертного газа.
Горячий конвертированный газ, выходящий из 288 труб реформера при температуре ~ 900 °С, поступает в два газосборных футерованных коллектора.
В холодильнике конвертированного газа и непосредственно за ним температура и состав газа корректируются с таким расчетом, чтобы были точно выдержаны конкретные параметры процесса восстановления.
Из трубопровода конвертированного газа ответвляется часть потока и охлаждается в противоточном оросительном охладителе (при этом содержание воды в упомянутом газе снижается). Температура основного потока регулируется количеством охлажденного конвертированного газа, вводимым в основной поток. Кроме того, можно повысить содержание метана (CH4
) в конвертированном газе, добавляя природный газ в его холодную часть. В трубопроводе восстановительного газа установлены датчики температуры и содержания метана.
В рекуператоре охлаждается дымовой газ реформера, нагревая воздух, подводимый к главным горелкам, смешанный и природный газ. Дымовой газ последовательно проходит через радиационную и конвективную зоны воздухоподогревателя, затем через конвективный подогреватель смешанного газа и, наконец, через конвективный подогреватель природного газа и при этом охлаждается.
Холодный воздух разделяется для его подогрева между радиационной и конвективной зонами воздухоподогревателя. В радиационной зоне дымовые газы и воздух движутся в прямотоке, а все конвективные зоны в рекуператоре работают по перекрестно-противоточному принципу.
Утилизация тепла дымового газа позволяет снизить общий расход тепла на процесс и увеличить производительность реформера, так как благодаря предварительному подогреву смешанного газа в рекуператоре участок нагрева в трубах реформера до начала конверсии получается более коротким.
Применена система с двумя параллельными рекуператорами, из которых дымовые газы отсасываются двухпоточным эксгаустером и сбрасывается в дымоход дымовой трубы.
Даже когда главные горелки реформера не работают, в воздухоподогреватель можно подавать воздух, благодаря чему предотвращается перегрев рекуператоров и эксгаустера. Нагретый воздух сбрасывается в дымовую трубу.
1.3.3 Цикл охлаждающего газа
В зоне охлаждения печи металлизации горячий металлизованный продукт (имеющий температуру ~ 760 °С) отдает физическое тепло охлаждающему газу, который входит в эту зону с температурой ~ 40 °С. Здесь теплопередача тоже идет в противотоке, так как охлаждающий газ движется сверху вниз из распределителя в отводящие каналы, расположенные поперек шахты навстречу движущимся сверху вниз окатышам. Для обеспечения равномерного хода печи предусмотрено разрыхление материалов в печи на трех уровнях зубьями питателя, постоянно движущегося взад и вперед. Три верхних постоянно действующих питателя выполнены водо-охлаждаемыми, а два средних и нижний работают без охлаждения.
Охлажденный металлизованный продукт выходит из печи металлизации через нижний динамический затвор и далее через маятниковый питатель. Как и на участке загрузки шихтовых материалов, в печь металлизации к нижнему динамическому затвору постоянно подводится инертный газ.
При помощи маятникового питателя можно управлять производительностью печи металлизации.
Горячий запыленный охлаждающий газ с температурой 400¸450 °С поступает через отводящие каналы в скруббер, который по конструкции в принципе аналогичен скрубберу колошникового газа, но не имеет разделения на два газовых потока. Чистый газ (имеющий остаточную запыленность не более чем ~ 10 мг/м3
) поступает в компрессор охлаждающего газа (такого же винтового типа, как компрессор технологического газа), который компенсирует потерю напора в цикле охлаждающего газа, составляющую ~ 40 кПа. Перед входом в печь металлизации охлаждающий газ в циклонном каплеотделителе освобождается от капель воды и далее через соответствующий распределитель подводится в зону охлаждения.
Между зонами восстановления и охлаждения всегда происходит неизбежный небольшой газообмен. Условия этого газообмена определяются расходом затворного газа, постоянно подводимого через динамический затвор, и устанавливающимся соотношением давлений в циклах технологического и охлаждающего газов.
Целесообразно отметить, что переход углерода в металлизованный продукт зависит от температуры охлаждающего газа. По мере снижения этой температуры содержание углерода в металлизованных окатышах повышается.
1.3.4 Цикл инертного газа
Для динамических затворов печи металлизации и для других потребителей постоянно необходим инертный газ. Для этого в цехе металлизации предусмотрена одна установка инертного газа для двух модулей. Каждая установка имеет следующие три системы: подачи инертного газа для нормальной работы, подачи продувочного газа, аварийной подачи инертного газа.
Часть потока дымового газа из реформера используется в качестве инертного газа. Этот газ не содержит никаких горючих компонентов. Содержание кислорода устанавливается на уровне ~ 1 % путем настройки отношения газ - воздух на горелках реформера. На случай, если содержание кислорода превышает 3 %, предусмотрено устройство, в котором природный газ сжигается в режиме недожога, таким образом, расходуется избыток кислорода.
1.4 УПРАВЛЕНИЕ ПРОЦЕССОМ МЕТАЛЛИЗАЦИИ
1.4.1 Организация управления
Чтобы можно было наблюдать за ходом процесса прямого восстановления и управлять им, наряду с визуальным изображением хода процесса (мнемонической схемой) нужна оптимальная организация ряда частных задач по управлению: измерение, регулирование и перестройка органов управления; наблюдение, оповещение и управление; проведение анализов и взвешивание [1].
Решение этих задач должно соответствовать модульной концепции агрегатов так, чтобы функции управления отдельными элементами агрегата включались в общую схему.
В соответствии со структурой цеха задачи по управлению процессом распределены между различными пультами управления. По два модуля прямого восстановления управляются из одного помещения, причем для каждого участка процесса в узком смысле (для печи металлизации, газовых циклов, реформера, трубопровода для отвода дымового газа) имеется свой участок пульта управления. Из общей части, расположенной между этими участками, управляются системы, используемые обоими модулями совместно (оборотные водяные циклы со сгустителем; градирнями и т.п., а также генераторы инертного газа) .
Таким образом, для модулей № 1 и 2 и № 3 и 4 имеются по одному распределительному щиту в помещении управления процессом, коммутационные помещения, трансформаторные подстанции и аварийный электрогенератор.
Управление доставкой окисленных окатышей, их распределением между четырьмя шахтными печами металлизации, отправкой металлизованных окатышей, станциями их грохочения, распределением металлизованных окатышей между обеими бункерными эстакадами (перед электросталеплавильным цехом и перед железнодорожной станцией) осуществляется с транспортного пульта. Предусматривается обмен сигналами между помещением транспортного пульта и обоими пультами для управления процессом.
Технологические параметры процесса и параметры работы машин увязываются между собой при помощи свободно программируемых систем управления. При этом реализуются все частные задачи управления процессом. В соответствии со структурой пультов управления предусмотрены свободно программируемые управляющие блоки. Эти блоки перерабатывают сигналы, поступающие на сторону их входа только в двоичном виде. Упомянутые сигналы формируются в датчиках предельных значений - местных и установленных в измерительных системах распределительных помещений и аналитических лабораторий, в концевых выключателях на вентилях (клапанах), на реле приводов и в выключателях на пультах управления процессом. Выходные сигналы передаются в бинарном виде на место на электромагнитные клапаны и в системы управления приводами в виде команд "включить - выключить" и на сигнальные лампы на местные пульты как сигналы с центрального пульта управления и от местных приборов управления.
На некоторых участках модулей для предупреждения при появлении взрывоопасных или токсичных газов установлены сигнализационные газоанализаторные устройства на взрывоопасность ("Экс") и на монооксид углерода (СО). При помощи таких устройств контролируются участки вокруг станций учета расхода природного газа, зоны загрузки в шахтные печи металлизации, газовые компрессоры, рекуператоры, генераторы инертного газа и некоторое другое оборудование. Для сигнализации о взрывоопасности ("Экс") определяется концентрация горючих газов, причем уровень подачи сигнала тревоги устанавливается на достаточном расстоянии от нижнего предела взрывоопасной концентрации горючего газа.
Система наблюдения за монооксидом углерода измеряет селективно содержание СО и подает сигнал тревоги при достижении максимально допустимой концентрации на рабочем месте.
1.4.2 Основные контуры регулирования в модулях прямого восстановления
Для оптимального управления работой установок прямого восстановления "Мидрекс" необходимо наблюдать за большим числом контуров измерения и регулирования (см. Приложение 6). Ввиду сложности технологических взаимосвязей в процессе эксплуатационный персонал должен иметь глубокие знания и большой опыт работы на установке, чтобы вести процесс по возможности без неполадок и получать хорошие показатели.
Приведём лишь некоторые важнейшие контуры регулирования.
1. Давление в системе необходимо поддерживать постоянным на таком уровне, чтобы условия на нагнетании компрессоров технологического газа были всегда определенными. Для выравнивания давления часть газа, выходящего из скруббера колошникового газа, отводится через заслонку регулирования давления из цикла технологического газа и доставляется на отопление реформера. Заслонка регулирования давления устанавливается соответствующим регулятором в такое положение, что давление в трубопроводе технологического газа между скруббером колошникового газа и компрессорами технологического газа остается постоянным.
2. Для конвертирования природного газа решающее значение имеет получение достаточно высокой влажности смешанного газа перед реформером. Это надежнее всего достигается настройкой правильного значения температуры технологического газа в насыщенном состоянии. Наиболее эффективно это реализуется регулированием температуры охлаждающей воды на стороне технологического газа в скруббере колошникового газа. Правильная температура устанавливается регулированием соотношения между горячей и холодной водой, поступающей в скруббер колошникового газа. Регулирование соотношения проводится по температуре технологического газа после компрессоров.
3. Определяющим рабочим параметром для цикла технологического газа является его объемный расход (в пересчете на нормальные условия). Поскольку компрессоры технологического газа работают с постоянным объемным расходом, нужно ответвлять регулируемую часть потока от основного и возвращать его в скруббер колошникового газа.
На основе измерения объемного расхода в основном потоке газа байпасный клапан на возвратном потоке регулируется с таким расчетом, чтобы объемный расход одного потока поддерживался на заданном уровне.
4. Природный газ, необходимый для процесса прямого восстановления, подводится в процесс в зависимости от требуемого количества продукта — металлизованных окатышей. Однако устанавливать жесткую связь между количеством выгружаемого продукта и количеством подводимого природного газа нецелесообразно. Природный газ лучше подводить в регулируемом постоянном соотношении с расходом технологического газа в его цикл. Заданное значение (уставка) для контура регулирования расхода природного газа при этом изменяется в настраиваемом соотношении в зависимости от расхода технологического газа.
5. Процессом конверсии необходимо управлять так, чтобы химический состав конвертированного газа после реформера соответствовал заданным концентрациям. При правильной настройке других параметров содержание СО в конвертированном газе определяется тонким регулированием расхода природного газа. Поэтому параллельно с регулированием соотношения между расходами технологического и природного газов предусматривается и тонкое регулирование расхода природного газа. в конвертированном газе определяется тонким регулированием расхода природного газа. Поэтому параллельно с регулированием соотношения между расходами технологического и природного газов предусматривается и тонкое регулирование расхода природного газа.
Заданное значение (уставка) в этом контуре регулирования изменяется в зависимости от результата анализа — содержания СОв конвертированном газе после реформера.
6. Потребность в тепле на процесс конверсии в значительной части покрывается избытком технологического газа - так называемым топливным газом. Недостающее количество тепла покрывается добавочным количеством природного газа, расход которого регулируется в зависимости от температуры в рабочем (топочном) пространстве реформера.
7. Для предотвращения экзотермически протекающей реакции обратной метанизации (образования СН из СО и Н) в шахтной печи к свежему конвертированному газу нужно добавлять некоторое количество метана в форме природного газа. Содержание СН в восстановительном газе должно устанавливаться на основе опыта (в основном в зависимости от характеристик применяемых окисленных окатышей). из СО и Н) в шахтной печи к свежему конвертированному газу нужно добавлять некоторое количество метана в форме природного газа. Содержание СН в восстановительном газе должно устанавливаться на основе опыта (в основном в зависимости от характеристик применяемых окисленных окатышей).
Расход добавляемого природного газа регулируется с таким расчетом, чтобы в восстановительном газе поддерживалось постоянное содержание метана.
8. Температура восстановления (в печи металлизации) должна устанавливаться, возможно, более высокой, в зависимости от производительности, степени использования газа, склонности металлизованных окатышей к вторичному окислению и их прочности. Однако, она ограничивается свойствами применяемых окисленных окатышей, в частности потому, что при некоторой температуре, специфической для данного вида окатышей, они спекаются в конгломерат, а в крайнем случае даже сплавляются. Допустимым верхним пределом температуры восстановления следует считать такую температуру, при которой появляются первые спекшиеся конгломераты металлизованных окатышей.
Температуру восстановительного газа регулируют путем ответвления от конвертированного газа, имеющего температуру ~ 900°С, части потока, охлаждения его до температуры насыщения вспрыскиванием воды и последующего подмешивания холодного газа к горячему с целью охлаждения его до требуемого температурного уровня. Величину охлаждаемого потока конвертированного газа регулируют при помощи заслонки после испарительного охладителя в зависимости от заданной температуры зоны восстановления.
9. Сжигание отопительного газа (смеси газов топливного колошникового и природного) в реформере должно происходить лишь с небольшим избытком воздуха. Кроме получения хорошего теплотехнического к.п.д. топки, это должно способствовать получению дымового газа, пригодного для последующей переработки на соответствующий инертный (затворный) газ.
Расход воздуха для горения следует устанавливать лишь с небольшим превышением стехиометрического соотношения (с коэффициентом расхода ~1,05). В соответствии с тем, что сжигается газ двух видов, расход так называемого первичного воздуха устанавливается в соотношении с расходом топливного колошникового газа, а расход так называемого вторичного воздуха в соотношении с расходом сжигаемого природного газа.
Вспомогательные горелки реформера, которые при нормальной работе выполняют лишь поддерживающую функцию, регулируются следующим образом: расход вспомогательного воздуха принимается в соотношении с расходом вспомогательного (добавляемого) природного газа. В соответствии с составами газов можно настроить соотношение газ - воздух на правильно заданное значение.
10. Давление в топочном (межтрубном) пространстве реформера должно поддерживаться на некотором постоянном уровне, во-первых, для того, чтобы обеспечить постоянство неизбежных подсосов атмосферного воздуха и, во-вторых, для защиты корпуса реформера и его конструктивных элементов.
Давление в топочном пространстве реформера определяется разрежением, создаваемым дымовым газом (тягой). По результатам измерения этого давления регулятор устанавливает правильное положение поворотных направляющих лопаток на всасывании вентилятора. Принимаются особые меры для того, чтобы при переходных рабочих состояниях во время пуска и выключения установки и при выходе горелок из строя получающиеся колебания давления укладывались в допустимые пределы.
11. Для защиты окружающей среды от загрязняющих газовых выбросов предусмотрена уже упоминавшаяся дымовая труба высотой 250 м. У основания дымовой трубы создается значительное разрежение, особенно при работе на холостом ходу. Чтобы защитить агрегат от недопустимо высокого разрежения, между эксгаустером и входом в дымовую трубу установлена дроссельная заслонка. Эта заслонка по результатам измерения давления непосредственно за эксгаустером регулирует предусмотренное давление.
12. Главным показателем работы модуля прямого восстановления является количество готового продукта (металлизованных окатышей), выгружаемого из печи металлизации. В качестве выгружающего устройства применен маятниковый питатель, в котором часть продукта сталкивается со стола вправо и влево при движениях толкателя. Выгруженное количество определяется числом ходов питателя за единицу времени. При нормальном ходе производственного процесса число ходов в час прямо пропорционально количеству выгруженных металлизованных окатышей.
Число ходов толкателя, имеющего гидравлический привод, регулируется на заданное значение по результатам определения выгруженного количества конвейерными весами. Управление числом ходов в минуту по результату измерения конвейерными весами возможно, но не является необходимым.
2. АКТУАЛЬНОСТЬ ИССЛЕДОВАНИЙ
2.1 АНАЛИТИЧЕСКИЙ ОБЗОР
2.1.1 Анализ темы дипломной работы
Тема дипломной работы отражает суть и предложения по разрешению вопросов, которые долгие годы не имели приемлемого решения, поскольку не было адекватных технологических методов [8,9]. На основании исследований предложено использовать методы искусственного интеллекта, в частности нейронные сети, что связано со стремительным развитием нейронных технологий в управлении за последнее десятилетие [3]. Благодаря этому и универсальности нейронных сетей появляется возможность автоматизировать многопараметрический и нелинейный процесс металлизации железа в шахтной печи при отсутствии формализованной модели.
Целью работы является исследование возможности применения искусственных нейронных сетей для автоматического управления процессом прямого восстановления железа в шахтной печи. Результатом исследований должна явиться нейросетевая модель автоматической системы управления процессом прямого восстановления железа, прогнозируемые результаты работы которой приемлемы относительно ручного управления оператором.
2.1.2 Обзор литературы
По тематике процесса восстановления количество литературных изданий позволяет в полной мере ознакомиться с методами и технологиями процесса прямого восстановления, а также определить необходимость автоматического управления [1,8,9,15,16,17].
Современный рынок литературных изданий, освещающих тематику интеллектуальных систем, достаточно широк и позволяет исследователю изучить основные методы и принципы и сформировать общую картину современного состояния разработок. При этом, крайне важным следует отметить скудную освещенность применения интеллектуальных систем управления на основе нейронных сетей в черной металлургии, в частности, в области решения задач автоматизации процессов прямого восстановления железа. Данный факт усложняет процесс исследования и разработки, но тем самым повышает научную и практическую значимость проводимой работы.
2.2 АКТУАЛЬНОСТЬ ПРОВОДИМЫХ ИССЛЕДОВАНИЙ
2.2.1 Исследование предметной области
Для исследования были выбраны модули прямого восстановления цеха ЦОиМ ОАО ОЭМК, использующие технологию фирмы "Мидрекс".
Пример Оскольского электрометаллургического комбината, построенного в СССР, продемонстрировал возможности промышленного получения высококачественного металла путем использования методов прямого восстановления железа в любых необходимых количествах [1]. При этом, только ряд экономических, технических и организационных просчетов, совершенных на этапах проектирования и строительства, не позволил ОЭМК стать в полной мере рентабельным производством. К сожалению, целый ряд неурядиц, связанных с износом оборудования, необходимостью разработки, изготовления и поставки оборудования, приборов, узлов, запасных частей взамен импортных преследовал комбинат и в последующем в процессе его эксплуатации. По этой причине возникала даже угроза остановки комбината. И, тем не менее, комбинат обеспечивал страну необходимым количеством высокосортного металла в полном объеме. В металлургической промышленности, так же, как и в других областях, к производительности установок, качеству продукции и гибкости при переналадке производственных процессов предъявляются все более высокие требования. Применение современного электротехнического оборудования и новейших автоматизированных систем с использованием средств вычислительной техники обеспечивает надежное и наглядное управление технологическим процессом, обширный контроль и диагностику неисправностей, высокую оперативную готовность агрегата и позволяет удовлетворить самым высоким требованиям к промышленному производству с одновременной экономией затрат [16].
2.2.2 Определение научного уровня
Предлагаемые методы автоматического управления процессом металлизации железа на основе нейронных технологий являются относительно новыми решениями для научной сферы [12,21,22]. Таким образом, данная тема относится к новому направлению развития нейронных технологий управления, что, несомненно, делает её актуальной как с точки зрения развития науки, так и с точки зрения практической полезности, вызванной, в первую очередь, спецификой исследуемой предметной области.
3. АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ
3.1 ХАРАКТЕРИСТИКА АВТОМАТИЗАЦИИ
3.1.1 Текущий уровень автоматизации
Для каждой из установок металлизации предусмотрен отдельный центральный пост управления процессом, расположенный в здании, где размещаются распредустройства. В помещениях КИПиА, кроме измерительных панелей с показывающими и самопишущими приборами, расположены шкафы с регуляторами, шкафы со вспомогательными электронными блоками, а также шкафы систем сигнализации и оповещения.
Все установки цеха, а также участок подвода и отвода энергетических сред оснащены большим количеством устройств измерения и регулирования, обеспечивающих поддержание на заданном уровне всех параметров процесса.
В соответствии со спецификой процессов автоматически должны регулироваться, в основном, теплотехнические параметры: температура, давление, расходы, уровни, плотность и химический состав газов и жидкостей. Проектом предусмотрено несколько тысяч точек контроля этих параметров. Измеряемые в ходе процесса значения преобразуются на месте в стандартные электрические сигналы и передаются в помещения КИПиА (посты управления). На взрывоопасных участках эти сигналы преобразуются в пневматические, которые управляют исполнительными органами. В качестве исполнительных органов в контурах регулирования предусмотрены дроссельные клапаны и регулируемые вентили с электрическими или пневматическими сервоприводами. Любой из них при отказе регулятора может быть перемещён вручную из поста управления, причём положение исполнительного органа указывается на пульте управления.
Каждое устройство сигнализации состоит из электронной системы извещения о неисправности с оптической индикацией поступающих сообщений. Существующие системы измерений технологических параметров и автоматизации реализованы на технических средствах TELEPERMC. В качестве устройств по сбору информации о состоянии агрегатов и формированию предупредительной, аварийной сигнализации, блокировок, а также для управления, сейчас частично используются программируемые контроллеры SIMATICS3.
На данный момент в отделении металлизации осуществляется контроль и регулирование технологических процессов с помощью системы автоматического управления технологическими процессами фирмы SimensAG, но начат постепенный переход с SimaticS3 на программно - аппаратный комплекс на базе универсальных программируемых промышленных контроллеров фирмы "ЭМИКОН" серии ЭК-2000 [36].
Специалистами управления автоматизации и метрологии комбината совместно с ЦОиМ была разработана и внедряется поэтапная программа модернизации установки автоматической системы управления. Уже осуществлена модернизация системы контроля и блокировок на шахтной печи №1; № 2. На очереди шахтные печи №3, № 4, на которых практическое выполнение работ было начато летом 2003 года.
Суть этой программы заключается в следующем: информация с первичных датчиков (преобразователей) поступает на универсальный микропроцессорный контроллер в виде токовых сигналов на соответствующие аналого-цифровые преобразователи (АЦП). Информационная панель установлена рядом с контроллером на двери шкафа. На информационной панели находится жидкокристаллический матричный дисплей и клавиатура. Панель подсоединяется к контроллеру по последовательному интерфейсу RS-485. На лицевой стороне панели имеются также светодиодные индикаторы, отражающие работу и связь панели с контроллером.
С контроллера значения контролируемых параметров передаются на операторские станции технолога по последовательному интерфейсу RS-485 с использованием сетевых модулей С-02А контроллера и С-05А компьютера операторской станции со скоростью 2,5 Мбит/с. На операторских станциях представлена вся информация о текущих значениях контролируемых параметров в цифровом и графическом виде. Оператор на основании этой информации принимает решения о необходимости управления тем или иным процессом. Управление осуществляется вручную с пульта управления в виде выдачи локальным регуляторам управляющих сигналов. Но оператору не всегда удаётся выбрать оптимальный режим. Как правило, все параметры работы печи устанавливаются на некоторое среднее значение, так чтобы при приемлемом качестве продукции была нормальная производительность печи.
3.1.2 Направление дальнейшего развития
Дальнейшее продвижение автоматизации в цеху металлизации возможно на пути решения задач управления производственным процессом. Это предполагает взаимосвязанное управление различными системами.
Возникающие при этом трудности связаны, в первую очередь, с особенностями технологического процесса (не всегда процесс протекает в нормальных условиях). Во вторую очередь, необходимо отметить, что очень не многие технологии управления сложными процессами сейчас могут реализовать полностью автоматическое управление. Здесь, можно отметить, по крайне мере, следующие проблемы:
- формализация задачи и построение математической модели;
- непредсказуемость объекта по параметрам и возмущениям;
- реализации АСУП для работы в режиме реального времени;
3.2 ПОСТАНОВКА ЗАДАЧИ
Решение задачи должно соответствовать модульной концепции агрегатов так, чтобы функции управления отдельными элементами агрегата включались в общую схему и, чтобы обеспечить взаимосвязанное управление различными системами, включающими в себя сложные многопараметрические процессы.
Система должна обрабатывать и анализировать на входе несколько сотен сигналов с установки металлизации и управлять исполнительными объектами в реальном времени. Также необходимость адаптации машины к изменяющимся внешним условиям и сохранение приобретённого опыта – одно из основных свойств.
Для реализации этих условий необходимо проанализировать и выбрать адекватный подход к решению задачи.
3.3 ОБЗОР ТЕХНОЛОГИЙ УПРАВЛЕНИЯ
3.3.1 Традиционные схемы управления
1. ПИ, ПИД контроллеры
Одними из первых систем управления были ПИ и ПИД контроллеры. Они доказали свою эффективность в управлении разнообразными процессами [3]. Использование ПИ и ПИД контроллеров не требует знания точной модели процесса, поэтому они эффективны в управлении промышленными процессами, математические модели которых достаточно сложно определить. ПИ и ПИД контроллеры строятся на основе классической теории управления. Установление связей между параметрами и управление действиями системы могут осуществляться инженерами-практиками и операторами
В большинстве случаев настройки, оптимальные значения ПИ и ПИД параметров достигаются путем минимизации взвешенного интеграла квадратичной ошибки.
Однако, наряду с вышеуказанными достоинствами, ПИ и ПИД контроллеры имеют и ряд недостатков. Так, если рабочая точка процесса изменяется из-за возмущений, параметры контроллера требуется перенастраивать вручную, чтобы получить новую оптимальную настройку. Настройка должна выполняться опытным оператором. Для систем с взаимодействующими контурами эта процедура может быть сложной и занимать много времени. Кроме того, для процессов с переменными параметрами, временными задержками, существенными нелинейностями и значительными помехами использование ПИ и ПИД контроллеров может не обеспечить оптимальных характеристик. Методы настройки ПИ и ПИД контроллеров также имеют ряд недостатков. Например, чувствительность к возмущениям или требуется человеко-машинное взаимодействие, в ходе которого оператор должен генерировать входные сигналы каждый раз, когда требуется изменение параметров с целью адаптации к изменению динамики процесса.
Управление с самонастройкой
По вышеупомянутым причинам необходимо, чтобы параметры контроллера настраивались в оперативном режиме управления с самонастройкой, в котором используется концепция машины, автоматически выполняющей самонастройку в целях управления произвольным динамическим процессом [3,19,20].
Управление с самонастройкой можно рассматривать как вид управления, выполняющий две основные задачи в замкнутом цикле обратной связи. На ней показаны обе основные задачи системы самонастройки. Первая из них — сбор информации о текущем состоянии управляемого процесса. К данной задаче относится постоянное определение текущего состояния управляемого процесса на основе измеренных данных о входе и выходе процесса, а также сигналов состояния.
Полученная информация используется для идентификации системы, которая включает определение структуры модели, оценку ее параметров, а также оценку параметров неконтролируемых сигналов (например, шумовых сигналов в стохастических системах). Определение структуры модели требует построения вида математического представления системы, соответствующего решаемой задаче. Оценка параметров представляет собой ключевой элемент самонастройки. Она выполняется в оперативном режиме. Для управления с самонастройкой используется несколько схем рекурсивной оценки параметров. Наиболее распространенная схема — рекурсивный метод оценки на основе метода наименьших квадратов или его расширение — UD факторизационный метод, который является более надежным.
Вторая задача системы самонастройки — задача проектирования (контроллера); ее решение обычно базируется на оптимизации критерия оптимальности управления. Цель управления задается для каждой конкретной системы, при этом требуется принять решения в отношении того, как контроллер должен адаптироваться или настраиваться. На этой основе рассчитывается новый набор параметров контроллера (взамен прежних параметров в цикле управления). Эта часть процесса известна как этап ратификации или утверждения. Одно из основных достоинств системы самонастройки состоит в том, что данный процесс выполняется в оперативном режиме и в реальном времени. При традиционном методе процесс утверждения обычно выполняется в автономном режиме, результаты часто оказываются неудовлетворительными, и весь процесс моделирования и проектирования приходится повторять. Расчет закона управления выполняется на основе процедуры, называемой эквивалентом определенности, в ней неопределенность текущих оценок параметров игнорируется.
3.3.2 Управление на основе искусственного интеллекта
Экспертные системы
Общие понятия
Экспертные системы (ЭС) - это набор программ или программное обеспечение, которое выполняет функции эксперта при решении какой-либо задачи в области его компетенции. ЭС, как и эксперт-человек, в процессе своей работы оперирует со знаниями [18]. Знания о предметной области, необходимые для работы ЭС, определенным образом формализованы и представлены в памяти ЭВМ в виде базы знаний, которая может изменяться и дополняться в процессе развития системы.
В отличие от машинных программ, использующих процедурный анализ, ЭС решают задачи в узкой предметной области (конкретной области экспертизы) на основе дедуктивных рассуждений. Такие системы часто оказываются способными найти решение задач, которые неструктурированны и плохо определены. Они справляются с отсутствием структурированности путем привлечения эвристик, т. е. правил, взятых "с потолка", что может быть полезным в тех системах, когда недостаток необходимых знаний или времени исключает возможность проведения полного анализа. При решении задач, требующих обработки большого объема знаний, возможность возникновения ошибки при переборе очень мала.
Главное достоинство экспертных систем - возможность накапливать знания, сохранять их длительное время, обновлять и тем самым обеспечивать относительную независимость конкретной организации от наличия в ней квалифицированных специалистов. Накопление знаний позволяет повышать квалификацию специалистов, работающих на предприятии, используя наилучшие, проверенные решения.
Основными отличиями ЭС от других программных продуктов являются использование не только данных, но и знаний, а также специального механизма вывода решений и новых знаний на основе имеющихся. Знания в ЭС представляются в такой форме, которая может быть легко обработана на ЭВМ. В ЭС известен алгоритм обработки знаний, а не алгоритм решения задачи. Поэтому применение алгоритма обработки знаний может привести к получению такого результата при решении конкретной задачи, который не был предусмотрен. Более того, алгоритм обработки знаний заранее неизвестен и строится по ходу решения задачи на основании эвристических правил. Решение задачи в ЭС сопровождается понятными пользователю объяснениями, качество получаемых решений обычно не хуже, а иногда и лучше достигаемого специалистами. В системах, основанных на знаниях, правила (или эвристики), по которым решаются проблемы в конкретной предметной области, хранятся в базе знаний. Проблемы ставятся перед системой в виде совокупности фактов, описывающих некоторую ситуацию, и система с помощью базы знаний пытается вывести заключение из этих фактов.
Качество ЭС определяется размером и качеством базы знаний (правил или эвристик). Система функционирует в следующем циклическом режиме: выбор (запрос) данных или результатов анализов, наблюдения, интерпретация результатов, усвоение новой информации, выдвижение с помощью правил временных гипотез и затем выбор следующей порции данных или результатов анализов. Такой процесс продолжается до тех пор, пока не поступит информация, достаточная для окончательного заключения.
В любой момент времени в системе существуют три типа знаний:
- Структурированные знания - статические знания о предметной области. После того как эти знания выявлены, они уже не изменяются.
- Структурированные динамические знания - изменяемые знания о предметной области. Они обновляются по мере выявления новой информации.
- Рабочие знания - знания, применяемые для решения конкретной задачи или проведения консультации.
Все перечисленные выше знания хранятся в базе знаний. Для ее построения требуется провести опрос специалистов, являющихся экспертами в конкретной предметной области, а затем систематизировать, организовать и снабдить эти знания указателями, чтобы впоследствии их можно было легко извлечь из базы знаний.
При создании ЭС возникает ряд затруднений. Это, прежде всего, связано с тем, что заказчик не всегда может точно сформулировать свои требования к разрабатываемой системе. Также возможно возникновение трудностей чисто психологического порядка: при создании базы знаний системы эксперт может препятствовать передаче своих знаний, опасаясь, что впоследствии его заменят "машиной". Но эти страхи не обоснованы, т. к. ЭС не способны обучаться, они не обладают здравым смыслом, интуицией. Но в настоящее время ведутся разработки экспертных систем, реализующих идею самообучения (нейросетевые ЭС). Также ЭС неприменимы в больших предметных областях и в тех областях, где отсутствуют эксперты.
Экспертная система состоит из базы знаний (части системы, в которой содержатся факты), подсистемы вывода (множества правил, по которым осуществляется решение задачи), подсистемы объяснения, подсистемы приобретения знаний и диалогового процессора.
При построении подсистем вывода используют методы решения задач искусственного интеллекта.
Достоинства экспертных систем
Постоянство - экспертные системы ничего не забывают из-за неограниченности базы знаний, в отличие от человека-эксперта;
Воспроизводимость - можно сделать любое количество копий экспертной системы, а обучение новых экспертов отнимает много времени и средств. Если имеется сложный лабиринт правил, то экспертная система может "распутать" этот лабиринт;
Устойчивость - Системы, основанные на знаниях, устойчивы к "помехам". Эксперт пользуется побочными знаниями и легко поддается влиянию внешних факторов, которые непосредственно не связаны с решаемой задачей. ЭС, не обремененные знаниями из других областей, по своей природе менее подвержены "шумам";
Эффективность - может увеличить производительность и уменьшать затраты персонала. Хотя экспертные системы дороги для создания и поддержки, они недороги для эксплуатации. Разработка и эксплуатационные расходы могут быть распределены среди многих пользователей. Полная стоимость может быть более разумной по сравнению с дорогими и малочисленными экспертами;
Постоянство - с использованием экспертных систем подобные транзакции обрабатываются одним и тем же способом. Система будет делать сопоставимые рекомендации для похожих ситуаций;
Влияние на людей - новый эффект (самая современная информация, имеющая влияние на здравый смысл). Главный эффект (ранняя информация доминирует над здравым смыслом );
Документация - экспертная система может задокументировать процесс решения задачи;
Законченность - экспертная система может выполнять обзор всех транзакций, а человек-эксперт сможет сделать обзор только отдельной выборки;
Своевременность - погрешности в конструкциях могут быть своевременно найдены;
Широта - могут быть объединены знания многих экспертов, что делает систему компетентной в широком спектре знаний, чего не может достичь один человек;
Снижают риск ведения дела - благодаря последовательности принятия решения, документированности, компетентности;
Недостатки экспертных систем
Интерфейс - большинство ЭС не вполне пригодны для применения конечным пользователем. Если вы не имеете некоторого опыта работы с такими системами, то у вас могут возникнуть серьезные трудности. Многие системы оказываются доступными только тем экспертам, которые создавали их базы знаний.
Быстродействие - вопросно-ответный режим, обычно принятый в таких системах, замедляет получение решений. Например, без экспертной системы врач может (а часто и должен) принять решение значительно быстрее, чем с ее помощью.
Здравый смысл - в дополнение к широкому техническому знанию, человек-эксперт имеет здравый смысл. Еще не известно, как заложить здравый смысл в экспертные системы;
Творческий потенциал - человек-эксперт может реагировать творчески на необычные ситуации, экспертные системы не могут;
Обучение - человек-эксперт автоматически адаптируется к изменению среды, экспертные системы нужно явно модифицировать. Нейронные сети - метод, который использует адаптацию и обучение.
Сенсорный Опыт - человек-эксперт располагает широким диапазоном сенсорного опыта, экспертные системы в настоящее время основаны на вводе символов;
Формализация - Все еще остается проблемой приведение знаний, полученных от эксперта, к виду, обеспечивающему их эффективную машинную реализацию.
Экспертные системы не эффективны, если решения не существует или когда проблема лежит вне области их компетенции. Системы, основанные на знаниях, также оказываются неэффективными при необходимости проведения скрупулезного анализа, когда число "решений" зависит от тысяч различных возможностей и многих переменных, которые изменяются во времени.
Критерий использования ЭС для решения задач
Существует ряд прикладных задач, которые решаются с помощью систем, основанных на знаниях, более успешно, чем любыми другими средствами. При определении целесообразности применения таких систем нужно руководствоваться следующими критериями.
1. Данные и знания надежны и не меняются со временем.
2. Пространство возможных решений относительно невелико.
3. В процессе решения задачи должны использоваться формальные рассуждения.
4. Должен быть, по крайней мере, один эксперт, который способен явно сформулировать свои знания и объяснить свои методы применения этих знаний для решения задач.
В таблице 3.1. приведены сравнительные свойства прикладных задач, по наличию которых можно судить о целесообразности использования для их решения ЭС [18].
Таблица 3.1Критерий актуальности ЭС
| Применимы |
Не применимы |
| Не могут быть построены строгие алгоритмы или процедуры, но существуют эвристические методы решения. |
Имеются эффективные алгоритмические методы. |
| Есть эксперты, которые способны решить задачу. |
Отсутствуют эксперты или их число недостаточно. |
| По своему характеру задачи относятся к области диагностики, интерпретации или прогнозирования. |
Задачи носят вычислительный характер. |
| Доступные данные "зашумлены". |
Известны точные факты и строгие процедуры. |
| Задачи решаются методом формальных рассуждений. |
Задачи решаются прецедурными методами, с помощью аналогии или интуитивно. |
| Знания статичны (неизменны). |
Знания динамичны (меняются со временем). |
В целом, ЭС не рекомендуется применять для решения следующих типов задач:
- математических, решаемых обычным путем формальных преобразований и процедурного анализа;
- задач распознавания, поскольку в общем случае они решаются численными методами;
- задач, знания о методах решения которых отсутствуют (невозможно построить базу знаний).
Подобно другим видам компьютерных программ ЭС не могут заменить человека в решении задач, а скорее напоминают орудия труда, которые дают ему возможность решать задачи быстрее и эффективнее. Эти системы не заменяют специалиста, а являются инструментом в его руках.
Нечёткая логика
Для многих промышленных процессов сложно обеспечить точное управление. Они обычно являются многомерными, нелинейными и изменяющимися во времени. Управление на основе нечеткой логики может успешно применяться для таких процессов [3,11]. Кроме того, нечеткие контроллеры могут работать с не полностью описанными системами с неизвестной динамикой, так как для них (в отличие от многих традиционных адаптивных контроллеров) не требуется априорная математическая модель объекта управления. Еще одно преимущество нечетких контроллеров состоит в том, что они могут быть легко реализованы на цифровых или аналоговых СБИС, в которых информация может кодироваться по параллельно распределенной схеме.
Применение нечеткой логики для управления процессами в промышленности имеет ряд преимуществ по сравнению с использованием традиционных контроллеров. По-видимому, одно из основных преимуществ состоит в том, что нечетко-логический контроллер может разрабатываться по лингвистическим правилам, что тесно связано с искусственным интеллектом. Одна из целей искусственного интеллекта состоит в том, чтобы заменить человека машиной при выполнении точных операций. Нечеткий контроллер состоит из набора условных лингвистических операторов, или правил (называемых нечеткими ассоциативными матричными правилами, или НАМ-правилами), задающими конкретные ситуации управления. Эти условные лингвистические операторы могут быть легко получены из соображений здравого смысла или из технических сведений о процессе, которым требуется управлять.
Алгоритмы нечеткого управления, использующиеся в следующих случаях:
–когда традиционные автоматические системы не справляются с управлением, а оператору в ручном режиме удается обеспечить заданное качество управления;
–когда необходимо быстро провести наладку автоматической системы, при этом, с одной стороны, отсутствуют математические модели объекта управления, с другой стороны, имеется богатый опыт в виде знаний и навыков оператора по управлению в ручном режиме.
Показана схема построения нечеткой системы управления (НСУ). В ней можно выделить четыре блока. Основой для построения НСУ является схема управления объектом с участием (1) эксперта. Именно эксперт на основе собственных знаний об управлении объектом формирует (2) описание процесса управления. В этом случае описание задается в виде набора лингвистических правил и условий работы каждого лингвистического правила. Затем экспертное описание процесса управления преобразуется (3) в блок управления на основе нечетких экспертных знаний - НСУ. Это дает возможность исключить эксперта из схемы управления и в дальнейшем управление осуществляется (4) только на основе знаний эксперта об управлении, хранящихся в базе знаний НСУ.
На практике формирование базы знаний НСУ производит не сам эксперт, а инженер по знаниям во взаимодействии с экспертом.
Основные этапы построения систем интеллектуального управления на основе нечёткой логики следующие:
1) Определение входов и выходов создаваемой системы;
2) Задание для каждой из входных и выходных переменных функции принадлежности;
3) Разработка базы правил для реализуемой нечёткой системы;
4) Выбор и реализация алгоритма нечёткого логического вывода;
5) Анализ результатов работы созданной системы (проверка адекватности разработанной модели).
Составляющей частью НСУ является контроллер нечеткой логики - наиболее важное приложение теории нечетких множеств. Его функционирование отличается от работы обычных контроллеров тем, что для описания системы используются знания экспертов вместо дифференциальных уравнений. Эти знания могут быть выражены естественным образом с помощью лингвистических переменных, которые описываются нечеткими множествами.
Система управления на основе нечеткой логики состоит из набора НАМ-правил, задающих конкретные ситуации управления [3]. Во многих приложениях достаточно найти соотношение между ошибкой и скоростью изменения ошибки в процессе, чтобы изменить управляющее воздействие на величину, обеспечивающую удовлетворительное управление системой.
В этом отношении могут быть сформулированы простые лингвистические правила, основанные на наблюдениях или на простом изучении хода процесса. Приведем пример лингвистического правила на естественном языке, которое эксперт может использовать для описания действия системы управления:
Если ошибка является положительной, и большой, а скорость изменения ошибки — отрицательная, и малая, то изменение на входе процесса — положительное и большое.
В правиле использованы три переменных: ошибка (Е), скорость изменения ошибки (С) и изменение управляющего воздействия (U). Они задаются фиксированными универсальными множествами, определяющими диапазоны измерений величин, возможные в данной системе управления. В некоторых приложениях [33,34] в качестве посылки НАМ-правила, с целью улучшения характеристик системы, может быть добавлена еще какая-либо переменная, например, величина предыдущего управляющего воздействия, однако это приводит к усложнению в разработке системы управления.
Нейронные сети
В последнее время для целей управления все шире начинают применяться нейронные сети. Они строятся на основе биологических структур мозга и, благодаря способности к самоорганизации и обучению, имеют большие преимущества перед обычными ПИД и самонастраивающимися регуляторами [2,3,5,11,12,13,14,21,22].
Они показали свою эффективность для решения задач распознавания образов. Нейронные сети способны обучаться на основе соотношений "вход-выход", поэтому они могут обеспечить более простые решения для сложных задач управления [2,3,6]. Кроме того, нейроны — это нелинейные элементы; следовательно, нейронные сети в своей основе являются нелинейными системами, пригодными для решения задач управления, принципиально связанных с наличием нелинейных характеристик. Традиционные методы управления не обеспечивают решения подобных задач. Таким образом, в последнее время интеллектуальное управление стало достаточно подходящим для решения реальных задач [2,14,21,22].
Вот основные причины, по которым нейронные сети в последние годы нашли широкое применение как в нейроуправлении, так и во многих других задачах науки и техники [3]:
- нейронные сети – наилучший из возможных способ аппроксимации и экстраполяции функций. Это справедливо при наличии в процессе обучения нейронных сетей достаточно большого объема обучающей информации, а также грамотного синтеза многослойной нейронной сети, решающей задачу;
- наличие множественных нелинейных функций активации в многослойной нейронной сети обеспечивает эффективную реализацию достаточно гибких нелинейных преобразований. Это важно для решения задач с существенными нелинейностями, для которых традиционные подходы пока не дают практически реализуемых решений;
- необходимым условием применения традиционных методов оптимального адаптивного управления является наличие большого объема априорной информации об объекте управления, например, данных математического моделирования. Благодаря способности нейронных сетей к обучению и самообучению для нейроконтроллеров такой объем информации не требуется. В связи с этим можно полагать, что нейроконтроллеры пригодны для управления в условиях существенных неопределенностей;
- высокая параллельность нейронных сетей является предпосылкой эффективной реализации аппаратной и программно-аппаратной поддержки нейросетевых контроллеров в контуре управления;
- многократно отмечаемое в литературе по нейронным сетям, но пока недостаточно исследованное свойство нейронных сетей монотонно (а не катастрофически) уменьшать качество работы при увеличении числа вышедших из строя элементов, а также отсутствие изменения качества работы при значительных изменениях параметров схем, реализующих элементы.
3.4 АНАЛИЗ
До 1998 г. система автоматики металлизации была оснащена зарубежной аппаратурой. В частности, для управления технологическим процессом, системой сигнализации и блокировок на базовом уровне использовали контроллеры SIMATIC S3, для системы измерений, индикации и контроля использовали мнемосхему процесса, систему самописцев, индикаторов и узкопрофильных приборов, на которые выводилась необходимая информация.
На данный момент внедряется стандарт открытых систем – поэтапная программа модернизации системы контроля и блокировок на шахтной печи на базе универсальных программируемых промышленных контроллеров фирмы "ЭМИКОН" серии ЭК-2000. Это делает предприятие независимым от одного поставщика АСУТП. Появляется возможность создать информационную связь с АСУП в режиме реального времени. В конечном счёте это означает существенное снижение как прямых, так и косвенных затрат на производство. Данная модернизация явилась следствием следующих факторов:
-моральный и физический износ оборудования КИПиА и автоматизации;
-дороговизна запасных частей и комплектующих (для самописцев);
-невозможность подключения компьютера к контроллерам типа SIMATIC S3, а современные контроллеры независимо от их типа обеспечивают свободный выбор при внедрении или модернизации системы;
-одним из важнейших факторов был временной, так как ни одна фирма не могла предложить замену (модернизацию) оборудования в сроки капитального ремонта.
Но вопрос по созданию автоматической системы управления процессом металлизации пока остаётся открытым. Это, в первую очередь, связано с рядом проблем:
- практически невозможна формализация процесса, в связи с чем возникают серьёзные затруднения с построением математической модели. Причём, даже если удастся создать такую модель, вопрос о её практической пригодности и полезности вряд ли можно экономически выгодно разрешить. Созданная модель оказалась бы громоздкой, так как должна описывать не только физику технологического процесса, но и учитывать взаимосвязи и возмущения, а это не позволит ей работать в режиме реального времени.
- модель и её параметры динамически меняются и из-за неформализованности процесса невозможно спрогнозировать его ход.
- отсутствие во многих традиционных системах управления (в том числе и в системах с самонастройкой) способностей к обучению и дообучению (эти функции в полной мере присущи искусственному интеллекту).
Разрешить названные проблемы очень трудно, используя только стандартные методы автоматизации.
Из вышесказанного понятно, что использование для автоматизации традиционных подходов практически невозможно, так как отсутствуют данные математического моделирования, а процесс по своей природе нелинеен и подвержен влиянию шумов. В связи с этим, надо искать альтернативные методы автоматизации, которые должны обладать вышеуказанными свойствами. Описанные ранее методы ИИ обладают этими свойствами.
3.5 ВЫВОДЫ
Для решения подобных задач необходима либо постоянная работа группы квалифицированных экспертов, либо адаптивные системы автоматизации, каковыми являются нейронные сети. Если создание экспертных систем может выполняться как на базе самоадаптирующихся систем, так и с использованием классических алгоритмов, то задачи управления агрегатами находятся целиком в компетенции систем с самостоятельной адаптацией.
В данной дипломной работе предложен метод автоматизации процесса металлизации на базе адаптивного нейросетевого подхода.
4. НЕЙРОННЫЕ СЕТИ
4.1 ЭЛЕМЕНТЫ НЕЙРОННЫХ СЕТЕЙ
4.1.1 Понятие нейрона
Основной элемент нейронной сети - это формальный нейрон, осуществляющий операцию нелинейного преобразования суммы произведений входных сигналов на весовые коэффициенты:

где X=(x1
, x2
, …, xn
)T
– вектор входного сигнала; W=(w1
, w2
, …, wn
) – весовой вектор; F – оператор нелинейного преобразования.
На рис. 4.1 представлена схема персептронного нейронного элемента, состоящая из сумматора å и блока нелинейного преобразования F. Каждому i-му входу нейрона соответствует весовой коэффициент wi
(синапс), характеризующий силу синаптической связи по аналогии с биологическим нейроном. Сумма произведений входных сигналов на весовые коэффициенты называется взвешенной суммой. Она представляет собой скалярное произведение вектора весов на входной вектор:

где |W|, |X| – соответственно длины векторов W и X; a = W, X– угол между векторами W и X.
Длины весового и входного векторов определяются через их координаты:

Так как для нейронного элемента длина весового вектора после обучения |W|=const, то величина взвешенной суммы определяется проекцией входного вектора на весовой вектор:

где ХW
– проекция вектора Х на вектор W.
Если входные векторы нормированы, т.е. |X|=const, то величина взвешенной суммы будет зависеть только от угла между векторами Х и W. Тогда при различных входных сигналах взвешенная сумма будет изменяться по косинусоидальному закону. Максимального значения она будет достигать при коллинеарности входного и весового векторов.
Если сила связи wi
отрицательная, то такая связь называется тормозящей. В противном случае синаптическая связь является усиливающей.
Оператор нелинейного преобразования называется функцией активации нейронного элемента, вектор входного сигнала - паттерном входной активности нейронной сети, а вектор выходного сигнала - паттерном выходной активности.
4.1.2 Функции активации нейронов
В качестве оператора нелинейного преобразования могут использоваться различные функции, которые определяются в соответствии с решаемой задачей и типом нейронной сети. Пусть Т - порог нейронного элемента, который характеризует расположение функции активации по оси абсцисс. Представим взвешенную сумму как:

Рассмотрим наиболее распространенные функции активации нейронных элементов (Табл. 4.1).
Пороговая
В качестве пороговой функции активации может использоваться биполярнаяили бинарная функция. Пороговая бинарная функция активации может принимать значения 0 или 1. В случае использования пороговой биполярнойфункции активации –1 или 1.
Линейная функция
В этом случае выходное значение нейронного элемента равняется взвешенной сумме у = kS, где k — коэффициент наклона прямой.
Изменение порога линейного элемента эквивалентно сдвигу функции активации по оси абсцисс.
Таблица 4.1. Перечень функций активации нейронов
| Наименование функции |
Функция |
Область значений |
| Пороговая бинарная |
 |
0, 1 |
Пороговая биполярная
(сигнатурная)
|
 |
-1, 1 |
Сигмоидная
(логистическая)
|
 |
[0, 1] |
| Полулинейная |
 |
 |
| Линейная |
f(S) = kS |
 |
Радиальная базисная
(Гауссова)
|
 |
(0, 1) |
Полулинейная
с насыщением
|
 |
(0, 1) |
Линейная ограниченная
(с насыщением)
|
 |
(-1,1) |
Гиперболический
Тангенс
|
 |
(-1,1) |
Модифицированная
Пороговая
|
 |
-1, 1 |
| Биполярная сигмоидная |
 |
[-1,1] |
| Треугольная |
 |
(0, 1) |
Сигмоидная функция
Эта функция является непрерывной, возрастающей функцией в диапазоне значений [0, 1]. Коэффициент ''c'' характеризует ширину сигмоидной функции по оси абсцисс.Сигмоидная функция является монотонной и всюду дифференцируемой. Поэтому она получила широкое распространение в искусственных нейронных сетях.
Модифицированная пороговая функция
Такая функция используется в двунаправленной ассоциативной памяти.
Гиперболический тангенс
Функция гиперболического тангенса аналогична биполярной сигмоидной функции. Коэффициент ''c'', как и в случае с сигмоидной функцией, характеризует ширину функции "гиперболический тангенс" по оси абсцисс.
Радиально-базисная функция
Она характеризуется функцией Гаусса для нормального закона распределения. Среднеквадратичное отклонение s характеризует ширину радиально-базисной функции.
Величина S в данном случае будет определяться в соответствии с евклидовым расстоянием между входным и весовым векторами:

Применение различных функций активации определяется классом решаемых нейронной сетью задач. Помимо перечисленных могут применяться и другие функции активации нейронных элементов, которые адекватно отражают решаемую задачу.
4.2 СТРУКТУРА НЕЙРОННЫХ СЕТЕЙ
4.2.1 Основные понятия
Нейронные сети образуются путем соединения нейронов по определенным правилам. Схема соединения нейронов называется структурой (в совокупности с методом обучения - парадигмой) нейронной сети. В общем случае для решения задачи можно использовать нейронную сеть любой структуры. Но на практике было определено, что для наилучшего решения определенных задач подходят только некоторые из структур. Поэтому одной из задач, решаемых в данной работе, является выбор структуры нейронной сети.
Все разнообразие структур нейронных сетей принято делить на прямоточные (сети с прямыми связями), сети с обратными связями (рекуррентные, самоорганизующиеся) и гибридные сети. В прямоточных сетях нейроны не связаны обратными связями, т.е. в таких сетях не образуется петель и информация передаётся в одном направлении. К таким сетям относятся сети персептронного типа (простой персептрон, многослойный персептрон). В многослойных сетях с обратным распространением информации, нейроны связаны не только прямыми, но и обратными связями, т.е. в структуре таких сетей образуются петли. К таким сетям относятся, например, рекуррентные, рециркуляционные и сети Кохонена. В прямоточных и рекуррентных сетях структура сети не изменяется при обучении и эксплуатации сети. В самоорганизующихся сетях при обучении могут изменяться не только веса синаптических связей, но и структура сети, количество нейронов в отдельном слое и даже количество слоев в сети. Гибридные сети представляют собой объединение различного рода структур и концепций обучения сетей.
4.2.2 Сети прямого распространения информации
Однослойные сети
Рассмотрим нейронные сети, состоящие из одного слоя нейронных элементов, который осуществляет обработку входной информации.
Такие сети принято изображать в виде двухслойной нейронной сети, где первый слой нейронных элементов является распределительным, а второй обрабатывающим. Распределительный слой передает входные сигналы на обрабатывающий слой нейронных элементов, который преобразует входную информацию в соответствии с синаптическими связями и функцией активации (рис. 5.3). При этом каждый нейрон распределительного слоя имеет синаптические связи со всеми нейронами обрабатывающего слоя.
Тогда выходное значение j-го нейронного элемента второго слоя можно представить как:

где Tj
– порог j-го нейронного элемента выходного слоя; wij
– сила синаптической связи между i-м нейроном распределительного слоя и j-м нейроном обрабатывающего слоя.
Совокупность весовых коэффициентов сети можно представить в виде матрицы размерностью п х т:

Тогда вектор-столбец взвешенной суммы в матричном виде определяется следующим образом:\

где T– вектор-столбец порогов нейронных элементов второго слоя.
Однослойный персептрон
Данную структуру предложил американский ученый Ф. Розенблатт в 1959 г. для нейронной сети, которую он назвал персептроном. Персептрон - это сеть, состоящая из S, А и R нейронных элементов (рис. 5.4). Нейроны слоя S называются сенсорными и предназначены для формирования входных сигналов в результате внешних воздействий. Нейроны слоя А называются ассоциативными и предназначены для непосредственной обработки входной информации. Нейроны слоя R называются эффекторными. Они служат для передачи сигналов возбуждения к соответствующему объекту. В сетях персептронного типа нейрон одного слоя связан со всеми нейронам другого слоя и не связан с нейронами своего собственного слоя. Простой персептрон состоит всего из двух слоев – входного и выходного. На входной слой подаются независимые и зависимые переменные. Нейроны входного слоя обрабатывают поступившую информацию и передают ее нейронам выходного слоя. Нейроны выходного слоя, в свою очередь, обрабатывают поступившую информацию и выдают ее на выход сети.
Многослойные сети
Многослойная нейронная сеть способна осуществлять любое отображение входных векторов в выходные. Архитектура такой сети состоит из множества слоев нейронных элементов.
Входной слой (inputlayer) нейронных элементов выполняет распределительные функции. Выходной слой (outputlayer) нейронов служит для обработки информации от предыдущих слоев и выдачи результатов. Слои нейронных элементов, расположенные между входным и выходным слоями, называются промежуточными или скрытыми (hiddenlayers). Как и выходной слой, скрытые слои являются обрабатывающими. Выход каждого нейронного элемента предыдущего слоя нейронной сети соединен синаптическими связями со всеми входами нейронных элементов следующего слоя. Таким образом, топология многослойной нейронной сети является однородной и регулярной (рис. 5.5).
В качестве функции активации нейронных элементов обычно используется гиперболический тангенс или сигмоидная функция.
Многослойный персептрон
В многослойном персептроне помимо входного и выходного слоев добавляются скрытые слои. Они представляют собой нейроны, которые не имеют непосредственных входов исходных данных, а связаны только с выходами входного слоя и с входом выходного слоя. Таким образом, скрытые слои дополнительно преобразуют информацию и добавляют нелинейности в модели (рис. 5.5).
Простой персептрон хорошо справляется с задачами классификации. Каждому выходу нейронной сети сопоставляется определенный класс входного набора данных. Обученная нейронная сеть анализирует полученную информацию и активизирует только один выход – тот, который соответствует классу входного набора. Простой персептрон не способен решать большинство других практических задач. Многослойный персептрон с сигмоидной функцией активации нейронов способен аппроксимировать любую функциональную зависимость и, таким образом, способен решать большой круг самых разнообразных задач. Но при этом заранее не известно ни нужное число слоев сети, ни нужное количество скрытых нейронов, ни необходимое для обучения сети время. В большинстве случаев эти задачи решаются при конструировании сети эмпирическим путем.
4.2.3 Сети обратного распространения информации
4.2.3.1 Многослойные сети
Рекуррентные (Recurrentnetworks), рециркуляционные (Recirculationnetworks) и релаксационные нейронные сети характеризуются как прямым (feedforward), так и обратным (feedback) распространением информации. При этом обратное распространение информации осуществляется по-разному для таких нейронных сетей. В рециркуляционных нейронных сетях распространение информации происходит по двунаправленным связям, которые имеют в различных направлениях разные весовые коэффициенты. При обратном распространении сигналов в таких сетях осуществляется их преобразование с целью восстановления входного образа. При прямом распространении сигналов происходит сжатие входных данных. В результате осуществляется рециркуляция информации. Обучение рециркуляционных нейронных сетей производится без учителя. Рекуррентные нейронные сети характеризуются обучением с учителем и обратными связями, по которым передаются результаты обработки сетью данных на предыдущем этапе. В результате этого входом рекуррентной нейронной сети в каждый фиксированный момент времени является вектор входных данных и результаты обработки информации сетью на предыдущем этапе. Обучение таких сетей базируется на алгоритме обратного распространения ошибки. Это дало повод, несмотря на различия между рекуррентными и рециркуляционными нейронными сетями, отнести их к одному классу.
Рекуррентные сети
Рекуррентными нейронными сетями называются такие сети, в которых выходы нейронных элементов последующих слоев имеют синаптические соединения с нейронами предшествующих слоев. Это приводит к возможности учета результатов преобразования нейронной сетью информации на предыдущем этапе для обработки входного вектора на следующем этапе функционирования сети. Рекуррентные сети могут использоваться для решения задач прогнозирования и управления. Существуют различные варианты архитектур рекуррентных нейронных сетей. В 1986 г. Джордан (Jordan) предложил рекуррентную сеть (рис. 5.6), в которой выходы нейронных элементов последнего слоя соединены посредством специальных входных нейронов с нейронами промежуточного слоя. Такие входные нейронные элементы называются контекстными нейронами (contextunits). Они распределяют выходные данные нейронной сети на нейронные элементы промежуточного слоя.
Число контекстных нейронов равняется числу выходных нейронных элементов рекуррентной сети. В качестве выходного слоя таких сетей используются нейронные элементы с линейной функцией активации. Тогда выходное значение j-го нейронного элемента последнего слоя определяется по формуле:

где vij
– весовой коэффициент между i-м нейроном промежуточного и j-м нейроном выходного слоев; pi
(t) – выходное значение i-го нейрона промежуточного слоя; Tj– пороговое значение j-го нейрона выходного слоя.
Взвешенная сумма i-ro нейронного элемента промежуточного слоя определяется следующим образом:

где wji
– весовой коэффициент между j-м нейроном входного и i-м нейроном промежуточного слоев;
р – число нейронов выходного слоя; wki
– весовой коэффициент между k-м контекстным нейроном и i-м нейроном промежуточного слоя;
Тj
– пороговое значение i-го нейрона промежуточного слоя;
n– размерность входного вектора.
Тогда выходное значение i-го нейрона скрытого слоя:
pi
(t)=F(Si
(t))(5.2.1.)
В качестве функции нелинейного преобразования Fобычно используется гиперболический тангенс или сигмоидная функция.
Другой вариант рекуррентной нейронной сети предложил Элман (Elman) в 1990 году.
В такой сети выходы нейронных элементов промежуточного слоя соединяются с контекстными нейронами входного слоя.
Тогда взвешенная сумма i-го нейронного элемента промежуточного слоя:
где т – число нейронов промежуточного слоя; pk
(t-1) –выходное значение k-го нейрона промежуточного слоя.
Выходное значение k-го нейрона промежуточного слоя определяется следующим образом:
pk
(t-1)=F(Si
(t-1))(5.2.3.)
Для построения рекуррентных нейронных сетей можно использовать также два приведенных выше подхода.
В этом случае существуют обратные связи к контекстным нейронам, как от нейронных элементов выходного, так и промежуточного слоев.
Число контекстных нейронов входного слоя равняется общему числу нейронов промежуточного и выходного слоев. Тогда:

где p - число нейронов выходного слоя.
Рециркуляционные нейронные сети

Рециркуляционные сети характеризуются как прямым У = f(X), так и обратным Х = f (У) преобразованием информации. Задача такого преобразования - достижение наилучшего автопрогноза или самовоспроизводимости вектора Х. Рециркуляционные нейронные сети применяются для сжатия (прямое преобразование) и восстановления исходной (обратное преобразование) информации. Такие сети являются самоорганизующимися в процессе работы, где обучение производится без учителя. Они были предложены в 1988 г. Теоретической основой рециркуляционных нейронных сетей служит анализ главных компонент (principalcomponentanalysis). Этот метод применяется в статистике для сжатия информации без существенных потерь её информативности. Он состоит в линейном ортогональном преобразовании входного вектора X размерности n в выходной вектор Y размерности p, где p< n. При этом компоненты вектора Y являются некоррелированными ,и общая дисперсия после преобразования остаётся неизменной.
Рециркуляционная нейронная сеть представляет собой совокупность двух слоев нейронных элементов, которые соединены между собой двунаправленными связями (рис. 5.8).
Каждый из слоев нейронных элементов может использоваться в качестве входного или выходного. Если слой нейронных элементов служит в качестве входного, то он выполняет распределительные функции.
В противном случае нейронные элементы слоя являются обрабатывающими. Весовые коэффициенты, соответствующие прямым и обратным связям, характеризуются матрицей весовых коэффициентов W и W'. Для наглядности рециркуляционную сеть можно представить в развернутом виде, как показано на рис. 5.9.
Такое представление сети является эквивалентным и характеризует полный цикл преобразования информации. При этом промежуточный слой нейронных элементов производит кодирование (сжатие) входных данных X, а последний слой - восстановление сжатой информации Y. Слой нейронной сети, соответствующий матрице связи W, назовем прямым, а соответствующий матрице связей W' - обратным.
Рециркуляционная сеть предназначена для сжатия данных и восстановления сжатой информации. Сжатие данных осуществляется при прямом преобразовании информации в соответствии с выражением
Y=F(WT
X)(5.2.5.)
Восстановление или реконструкция данных происходит при обратном преобразовании информации:
X=F(W'Y)(5.2.6.)
В качестве функции активации нейронных элементов F может использоваться как линейная, так и нелинейная функции. При использовании линейной функции активации.Релаксационные нейронные сети
Релаксационные нейронные сети характеризуются прямым и обратным распространением информации между слоями сети. В основе функционирования таких сетей лежит итеративный принцип работы. Он заключается в том, что на каждой итерации происходит обработка данных, полученных на предыдущем шаге. Такая циркуляция происходит до тех пор, пока не установится состояние равновесия. При этом состояния нейронных элементов перестают изменяться и характеризуются стационарными значениями. Для анализа устойчивости релаксационных нейронных сетей используются функции Ляпунова. Такие сети применяются в качестве ассоциативной памяти и для решения комбинаторных задач оптимизации. К релаксационным относятся нейронные сети Хопфилда, Хемминга, двунаправленная ассоциативная память и машина Больцмана.
В 1982 г. американский биофизик Д. Хопфилд (Hopfield) представил математический анализ релаксационных сетей с обратными связями. В основе анализа лежит теория изинговых спинов, которая используется для изучения ферромагнетиков при низких температурах. Поэтому такие нейронные сети получили название сетей Хопфилда.
Нейронная сеть Хопфилда характеризуется обратными связями. В ней каждый нейрон имеет синаптические связи со всеми остальными нейронами сети.
Архитектуру такой сети представим в виде двух слоёв нейронных элементов (рис. 5.10).

При этом первый слой является распределительным, а второй слой нейронных элементов осуществляет нелинейное преобразование взвешенной суммы:
где yi
(t+1) – выходное значение i-го нейронного элемента в момент времени t+1; F– оператор нелинейного преобразования; Ti
– пороговое значение i-го нейрона.
В матричной форме модель Хопфилда можно представить как:
Y(t+1)=F (S(t)); S(t)=WT
Y(t)-T (5.2.8.)
При этом используемые векторы имеют вид:
S=[S1
, S2
,…,Sn
]T
; Y=[y1
, y2
,…,yn
]T
; T=[T1
, T2
,…,Tn
]T
;
 (5.2.9.) (5.2.9.)
В качестве матрицы весовых коэффициентов Хопфилд использовал симметричную матрицу (wij
=wji
) с нулевой главной диагональю (wii
=0). Последнее условие соответствует отсутствию обратной связи нейронного элемента на себя. В качестве функции активации нейронных элементов F может служит как пороговая, и непрерывная функции, например сигмоидная или гиперболический тангенс.
Сеть Хопфилда может использоваться в качестве ассоциативной памяти. В этом случая она способна распознавать зашумлённые или искажённые образы. Для обучения нейронной сети Хопфилда используется правило Хебба.
В 1987 г. Р. Липпманом (Lippman) была предложена нейронная сеть Хэмминга (HammingNetwork). Она представляет собой релаксационную, многослойную нейронную сеть с обратными связями между отдельными слоями. Сеть Хэмминга применяется в качестве ассоциативной памяти. При распознавании образов она использует в качестве меры близости расстояние Хэмминга. Весовые коэффициенты и пороги сети Хэмминга определяются из условия задачи, поэтому такая сеть является нейронной сетью с фиксированными связями.
Сеть Хэмминга является многослойной, состоящей из различных классов нейронных сетей. Пусть имеется m образов, каждый из которых имеет размерность n:
Тогда нейронная сеть Хэмминга будет состоять из сети с прямыми связями, сети Хопфилда и слоя выходных нейронов (рис. 5.11).
Сеть с прямыми связями состоит из n входных распределительных и m выходных нейронных элементов. Она вычисляет меру подобия между входными и эталонными образами, хранящимися в ней. В качестве меры подобия используется число одинаковых разрядов между входным и эталонным образом.
Сеть Хопфилда используется для разрешения возникающих конфликтов, когда входной паттерн является подобным нескольким эталонным образам, хранящимся в сети. При этом на выходе сети остаётся активным только один нейрон-победитель.
Выходной слой нейронной сети состоит из mнейронов, каждый из которых имеет пороговую функцию активации. Он предназначен для преобразования выходной активности нейрона-победителя сети Хэмминга в единичное значение. При этом значения всех остальных нейронов выходного слоя устанавливаются в нулевое состояние. Таким образом, происходит идентификация входного паттерна, который кодируется номером нейрона выходного слоя, имеющим единичное значение. Если входной образ не совпадает с эталонным, то на выходе сети Хэмминга будет формироваться такой эталонный паттерн, который имеет минимальное расстояние Хэмминга по отношению к выходному образу.
В 1988 г. Б. Коско предложил дальнейшее развитие сети Хопфилда – двунаправленную ассоциативную память, представляющей собой релаксационную сеть с циркуляцией информации.
Двунаправленная ассоциативная память состоит из двух слоёв нейронных элементов. Нейроны каждого из слоёв могут быть как входными, так и выходными. Архитектура двунаправленной ассоциативной памяти аналогична рециркуляционной нейронной сети (рис. 5.8). Однако принципы функционирования таких сетей разные.
4.2.3.2 Саморганизующиеся нейронные сети
Самоорганизующиеся нейронные сети (self-organisingnetworks) характеризуются обучением без учителя, в результате которого происходит адаптация сети к решаемой задаче. К таким сетям относятся нейронные сети Кохонена, адаптивного резонанса и рециркуляционные сети (см. п. 5.2.3.1). В каждой из этих сетей самоорганизация происходит в результате различных механизмов обучения. Наиболее известными среди самоорганизующихся нейронных сетей являются сети, которые разработал в 80-х годах финский ученый Т.Кохонен (Kohonen). Нейронные сети Кохонена осуществляют топологическое упорядочивание входного пространства паттернов. Они широко применяются в задачах распознавания образов, оптимизации и управления.
Самоорганизующиеся нейронные сети используются для решения различных задач: кластеризации, векторного квантования, сокращения размерности входного пространства, выделения характерных признаков и т.д. При кластеризации входные образы группируются в кластеры, причем каждому кластеру ставится в соответствие отдельный нейрон. Векторное квантование применяется для сжатия данных. Для обучения самоорганизующихся нейронных сетей используется конкурентный метод, который был предложен в 1976 г. С. Гроссбергом (S. Grossberg) и затем развит в работах финского ученого Т. Кохонена (Т. Kohonen).
Сети адаптивного резонанса
Нейронные сети адаптивного резонанса были предложены С. Гроссбергом (S.Grossberg) в 1976 г. Они основываются на теории адаптивного резонанса (AdaptiveResonanceTheory). В соответствии с ней такие нейронные сети называются ART-сетями. Резонанс в них происходит при идентификации какого-либо события или образа. В процессе функционирования ART-сетей в них происходит циркуляция информации до тех пор, пока не наступит состояния резонанса. Нейронные сети адаптивного резонанса обучаются без учителя и характеризуются самоорганизацией в процессе работы. Они могут использоваться для распознавания образов, обработки речевых сигналов и в задачах управления.
Теория адаптивного резонанса базируется на следующих основных принципах:
1. Адаптация входного паттерна к паттернам, хранящимся в сети, осуществляется при помощи резонанса.
2. Резонанс происходит при идентификации входного образа, когда он максимально совпадает с образом, хранящимся в сети. В процессе функционирования сеть резонирует до тех пор, пока не выделит паттерн наименее отличающийся от входного, или не зарезервирует новый класс.
3. В процессе адаптации входного паттерна к образам, имеющимся в сети, происходит его контрастное усиление. Оно характеризуется тем, что только отличительные особенности входного паттерна отображаются на синаптические веса. Это напоминает процесс биологической эволюции, когда отдельные признаки усиливаются, а другие ослабляются.
4. Хранение информации осуществляется в кратковременной (short-term-memory) и долговременной (long-termmemory) памяти. Кратковременная память хранит входной паттерн, который должен быть декодирован, а долговременная соответствует образам, которые хранятся в нейронной сети.
Отсюда следует, что теория адаптивного резонанса имеет биологические предпосылки. Так, долговременная и кратковременная память соответствует типам памяти, которые имеются у человека. Явление резонанса играет большую роль, как при самоорганизации индивида, так и биологической системы.
Постановка задачи при распознавании образов методом адаптивного резонанса состоит в следующем. Необходимо найти такие синаптические векторы W1
,W2
,...,Wm
, которые разбивают входное пространство паттернов на различные кластеры. Каждый кластер имеет размер, который характеризуется угловым расстоянием a (рис. 5.15) и соответствующей ему величиной r = cosa, называемой параметром бдительности.
Если r имеет маленькое значение, то входные векторы будут отображаться на большие кластеры, в противном случае на маленькие (рис. 5.15). В соответствии с параметром бдительности нейронная сеть должна каждый раз решать, принадлежит ли входной вектор уже имеющемуся кластеру, или резервировать для него новый кластер с соответствующим весовым вектором. Это обеспечивает, с одной стороны, пластичность сети, так как каждый раз сеть может реагировать на незнакомый образ и, с другой стороны, стабильность, так как уже идентифицированные кластеры не размываются посредством новых входных векторов.
Существуют различные модели нейронных сетей, основанных на теории адаптивного резонанса. В общем случае архитектура таких сетей представлена на рис. 5.16. Она состоит из двух слоев, которые соединены между собой прямыми и обратными синаптическими связями. Весовой вектор W характеризует прямые синаптические связи, а вектор V - обратные синаптические связи (рис. 5.16).
Информация, хранящаяся в этих связях, характеризует долговременную память (LTM), активизация нейронов каждого из слоев - кратковременную память (STM). При помощи конкурентного слоя входной паттерн отображается в соответствующий кластер.
Сравнивающий слой анализирует степень совпадения входного и выделенного сетью образа. При достаточной степени совпадения наступает резонанс, что соответствует идентификации образа.
Для описания функционирования и обучения таких сетей С. Гроссберг использовал дифференциальные уравнения. Используя функцию Ляпунова, С.Гроссберг доказал сходимость нейронных сетей, в основе которых лежит теория адаптивного резонанса.
4.2.4 Гибридные нейронные сети
Гибридные нейронные сети представляют собой объединение различного рода нейронных сетей и концепций их обучения. Они предназначены для решения различного рода задач, таких как распознавание образов, прогнозирование, аппроксимация функций и т. д.
Нейронные сети встречного распространения
Нейронные сети встречного распространения (Counterpropagationnetworks) были предложены в 1987 г. Р. Хечт-Нильсоном (Hecht-Nielsen). Они являются дальнейшим расширением нейронных сетей Кохонена и предназначены для аппроксимации функций. В отличие от сети Кохонена, которая разбивает входное n- мерное пространство на разные области, сеть встречного распространения ставит в соответствие каждой области числовое значение аппроксимируемой функции. Она характеризуется сочетанием двух подходов к обучению: с учителем и без учителя. Существуют различные варианты нейронных сетей встречного распространения, которые используют разные методы аппроксимации функций.
Нейронные сети с радиально-базисной функцией
Нейронные сети с радиально-базисной функцией (RadialBasisFunctionNetwork) являются дальнейшим развитием сетей встречного распространения. Они были предложены в 1989 г. и предназначены для решения задач распознавания образов, прогнозирования, сжатия данных и аппроксимации функций. Нейроны входного слоя выполняют распределительные функции. Промежуточный слой состоит из нейронов Кохонена. Каждый элемент скрытого слоя использует в качестве активационной функции радиальную базисную функцию типа гауссовой, а в качестве выходного слоя используются нейронные элементы с линейной функцией активации.
4.3 ОБУЧЕНИЕ НЕЙРОННЫХ СЕТЕЙ
4.3.1 Структура сети
Способность к обучению является фундаментальным свойством мозга. В контексте ИНС процесс обучения может рассматриваться как настройка архитектуры сети и весов связей для эффективного выполнения специальной задачи. Обычно нейронная сеть должна настроить веса связей по имеющейся обучающей выборке. Функционирование сети улучшается по мере итеративной настройки весовых коэффициентов. Свойство сети обучаться на примерах делает их более привлекательными по сравнению с системами, которые следуют определенной системе правил функционирования, сформулированной экспертами.
Теория обучения рассматривает три фундаментальных свойства, связанных с обучением по примерам: емкость, сложность образцов и вычислительная сложность. Под емкостью понимается сколько образцов может запомнить сеть, и какие функции и границы принятия решений могут быть на ней сформированы. Сложность образцов определяет число обучающих примеров, необходимых для достижения способности сети к обобщению. Слишком малое число примеров может вызвать переобученность сети, когда она хорошо функционирует на примерах обучающей выборки, но плохо - на тестовых примерах, подчиненных тому же статистическому распределению.
Для конструирования процесса обучения, прежде всего, необходимо иметь модель внешней среды, в которой функционирует нейронная сеть - знать доступную для сети информацию. Эта модель определяет парадигму обучения. Во-вторых, необходимо понять, как (по какому алгоритму) модифицировать весовые параметры сети - какие правила обучения управляют процессом настройки. Алгоритм обучения означает процедуру, в которой используются правила обучения для настройки весов. Эффективность обучения многослойных нейронных сетей зависит от числа слоев, числа элементов в скрытых слоях нейронной сети и начальной инициализации весовых коэффициентов. Разная инициализация весовых коэффициентов нейронной сети может приводить к различным решениям задачи. Важную роль здесь играет размер случайно инициализируемых синаптических связей. Так, для сигмоидной функции активации нейронных элементов, если весовые коэффициенты будут иметь большие значения (положительные или отрицательные), то выходная активность нейронных элементов будет близка к единице или нулю. Это приведет к тому, что процесс обучения остановится в ближайшем, локальном минимуме от стартовой точки. Рекомендуется случайно выбирать значения весовых коэффициентов, которые имеют следующий порядок:

где  — число нейронных элементов в слое — число нейронных элементов в слое  . .
Другой способ - случайным образом инициализировать весовые коэффициенты в диапазоне [-0,05; 0,05] или [-0,1; 0,1]. При этом пороговые значения нейронных элементов устанавливаются в начальный момент времени в единичные значения.
Большую роль для эффективности обучения играет архитектура нейронной сети. Размерность входного и выходного слоев нейронной сети определяется из условия решаемой задачи или обучающей выборки. Как было доказано в [16], при помощи трехслойной нейронной сети можно аппроксимировать любую функцию со сколь угодно заданной точностью. При этом точность аппроксимации зависит от числа нейронов в скрытом слое. Чем больше число нейронных элементов в скрытом слое, тем больше точность. Однако при слишком большой размерности скрытого слоя может наступить явление, называемое перетренировкой сети, так как слишком большое число нейронов в скрытом слое ухудшает обобщающие способности нейронных сетей. Поэтому число нейронных элементов в скрытом слое должно быть меньше числа тренировочных образцов. С другой стороны, при слишком малой размерности скрытого слоя можно попасть в нежелательный локальный минимум или процесс обучения будет слишком длительным. Поэтому здесь необходим разумный компромисс.
Для обеспечения требуемой точности и обобщающей способности можно использовать нейронную сеть с двумя скрытыми слоями, размерность которых меньше, чем при использовании трехслойной сети. Однако нейронные сети, которые имеют несколько скрытых слоев, обучаются значительно медленнее.
Исходя из проведенных в данном разделе рассуждений, можно сделать следующие выводы:
- нейронная сеть с одним скрытым слоем позволяет осуществить любое отображение входных сигналов в выходные;
- число нейронных элементов в промежуточном слое должно быть меньше числа тренировочных образцов;
- мощность нейронной сети можно увеличивать как за счет числа нейронов в слое, так и за счет числа слоев. Если на нейронную сеть накладываются ограничения, и она не может решить поставленную задачу, то необходимо увеличивать число скрытых слоев нейронной сети;
- случайная инициализация весовых коэффициентов нейронной сети должна проходить в достаточно узком диапазоне значений.
4.3.2 Алгоритмы обучения
Существуют три парадигмы обучения: "с учителем", "без учителя" (самообучение) и смешанная. В первом случае нейронная сеть располагает правильными ответами (выходами сети) на каждый входной пример. Веса настраиваются так, чтобы сеть производила ответы как можно более близкие к известным правильным ответам. Усиленный вариант обучения с учителем предполагает, что известна только критическая оценка правильности выхода нейронной сети, но не сами правильные значения выхода. Обучение без учителя не требует знания правильных ответов на каждый пример обучающей выборки. В этом случае раскрывается внутренняя структура данных или корреляции между образцами в системе данных, что позволяет распределить образцы по категориям. При смешанном обучении часть весов определяется посредством обучения с учителем, в то время как остальная получается с помощью самообучения.
Известны четыре основных типа правил обучения: коррекция по ошибке, машина Больцмана, правило Хебба и обучение методом соревнования.
Правило коррекции по ошибке
При обучении с учителем для каждого входного примера задан желаемый выход d. Реальный выход сети y может не совпадать с желаемым. Принцип коррекции по ошибке при обучении состоит в использовании сигнала (d-y) для модификации весов, обеспечивающей постепенное уменьшение ошибки. Чтобы реализовать эту процедуру, нам нужно изменять каждый вес на величину, пропорциональную скорости, с которой изменяется ошибка по мере изменения веса. Эта величина (называемая производной ошибки по весу и обозначаемая EW) вычисляется не просто. Один из способов вычисления EW заключается в том, чтобы изменить вес на очень маленькую величину и посмотреть, как изменится ошибка. Однако, этот метод не эффективен, поскольку требует отдельных вариаций для каждого из многих весов. Известны различные модификации этого алгоритма обучения (например, на базе одного из градиентных методов – метод обратного распространения ошибки).
Обучение Больцмана
Представляет собой стохастическое правило обучения, которое следует из информационных теоретических и термодинамических принципов. Целью обучения Больцмана является такая настройка весовых коэффициентов, при которой состояния видимых нейронов удовлетворяют желаемому распределению вероятностей. Обучение Больцмана может рассматриваться как специальный случай коррекции по ошибке, в котором под ошибкой понимается расхождение корреляций состояний в двух режимах.
Правило Хебба
Самым старым обучающим правилом является постулат обучения Хебба. Хебб опирался на следующие нейрофизиологические наблюдения: если нейроны с обеих сторон синапса активизируются одновременно и регулярно, то сила синаптической связи возрастает. Важной особенностью этого правила является то, что изменение синаптического веса зависит только от активности нейронов, которые связаны данным синапсом. Это существенно упрощает цепи обучения.
Обучение методом соревнования
В отличие от обучения Хебба, в котором множество выходных нейронов могут возбуждаться одновременно, при соревновательном обучении выходные нейроны соревнуются между собой за активизацию. Это явление известно как правило "победитель берет все". Подобное обучение имеет место в биологических нейронных сетях. Обучение посредством соревнования позволяет кластеризовать входные данные: подобные примеры группируются сетью в соответствии с корреляциями и представляются одним элементом. При обучении модифицируются только веса "победившего" нейрона. Эффект этого правила достигается за счет такого изменения сохраненного в сети образца (вектора весов связей победившего нейрона), при котором он становится чуть ближе к входному примеру.
В таблице 2 представлены различные алгоритмы обучения и связанные с ними архитектуры сетей (список не является исчерпывающим). В последней колонке перечислены задачи, для которых может быть применен каждый алгоритм. Каждый алгоритм обучения ориентирован на сеть определенной архитектуры и предназначен для ограниченного класса задач. Кроме рассмотренных, следует упомянуть некоторые другие алгоритмы: Adaline и Madaline , линейный дискриминантный анализ , проекции Саммона, анализ главных компонентов .
4.3.2 Алгоритм обратного распространения ошибки
Математические основы алгоритма
Примерно в 1974 году Поль Дж. Вербос изобрел значительно более эффективную процедуру для вычисления EW, когда работал над своей докторской диссертацией в Гарвардском университете. Процедура, известная теперь как алгоритм обратного распространения (back propagation algorithm), стала одним из наиболее важных инструментов в обучении нейронных сетей.
Алгоритм обратного распространением проще всего понять, когда все элементы сети линейны. Алгоритм вычисляет каждую EW, сначала вычисляя EA – скорость, с которой изменяется ошибка при изменении уровня активности элемента. Для выходных элементов EA является просто разностью между действительным и желаемым выходом. Чтобы вычислить EA для скрытого элемента в слое, непосредственно предшествующем выходному слою, мы сначала идентифицируем все веса между этим скрытым элементом и выходными элементами, с которыми соединен данный скрытый элемент. Затем мы умножаем эти веса на величины EA для этих выходных элементов и складываем полученные произведения. Эта сумма и равна EA для данного скрытого элемента. Вычислив EA для всех элементов скрытого слоя, прилегающего к выходному, мы можем аналогичным образом рассчитать EA и для других слоев, перемещаясь в направлении, обратном тому направлению, в котором активность нейронов распространяется по сети. Отсюда и название алгоритма обратного прослеживания (или обратного распространения). После того как значение EA для элемента вычислено, подсчитать EW для каждой входной связи элемента уже несложно. Величина EW является произведением EA и активности во входной цепи.
Для нелинейных элементов алгоритм обратного распространения включает дополнительный шаг. Перед перемещением в обратном направлении EA необходимо преобразовать в EI – скорость, с которой изменяется ошибка по мере изменения суммарного входа элемента.
Чтобы реализовать этот алгоритм, мы сначала должны дать математическое описание нейронной сети. Рассмотрим нейронную сеть, состоящую из четырех слоев (рис. 5.17). Обозначим слои нейронных элементов от входа к выходу соответственно через  . Тогда выходное значение . Тогда выходное значение  -го нейрона последнего слоя: -го нейрона последнего слоя:

где  – взвешенная сумма -го нейрона выходного слоя; – взвешенная сумма -го нейрона выходного слоя;  – выходное значение – выходное значение  -го нейрона предпоследнего слоя; -го нейрона предпоследнего слоя;  – весовой коэффициент -го нейрона выходного слоя; – весовой коэффициент -го нейрона выходного слоя;  – порог -го нейрона выходного слоя. – порог -го нейрона выходного слоя.
Аналогичным образом выходное значение -гонейрона предпоследнего слоя:

Соответственно для  -го слоя: -го слоя:
Алгоритм обратного распространения ошибки минимизирует среднеквадратичную ошибку нейронной сети. Для этого с целью настройки синаптических связей используется метод градиентного спуска в пространстве весовых коэффициентов и порогов нейронной сети. Согласно методу градиентного спуска изменение весовых коэффициентов и порогов нейронной сети происходит по следующему правилу:

где  – среднеквадратичная ошибка нейронной сети для одного набора значений входов. – среднеквадратичная ошибка нейронной сети для одного набора значений входов.
Эта среднеквадратичная ошибка определяется по формуле:
где  – эталонное выходное значение -го нейрона. – эталонное выходное значение -го нейрона.
Ошибка -го нейрона выходного слоя:

Ошибка  некоторого -го нейрона произвольного слоя сети зависит от ошибки нейронных элементов следующего слоя и определяется по формуле: некоторого -го нейрона произвольного слоя сети зависит от ошибки нейронных элементов следующего слоя и определяется по формуле:

где и  – выходное значение -го и -го нейрона соответственно; – взвешенная сумма -го нейрона. – выходное значение -го и -го нейрона соответственно; – взвешенная сумма -го нейрона.
Принимая во внимание:
получаем, что для любого скрытого слоя i ошибка i-го нейронного элемента определяется рекурсивным образом через ошибки нейронов следующего слоя j по следующей формуле:

где m – число нейронов следующего слоя по отношению к слою i.
Аналогичным образом доказывается, что производные среднеквадратичной ошибки по весовым коэффициентам и порогам нейронных элементов для любых двух слоев i и j определяются по формулам:

Из последних формул очевидно, что для минимизации среднеквадратичной ошибки сети весовые коэффициенты и пороги нейронных элементов должны изменяться с течением времени следующим образом:


где a – скорость обучения.
Последние два выражения () и () определяют правило обучения многослойных нейронных сетей в общем виде, которое называют обобщенным дельта-правилом.
Недостатки алгоритма обратного распространения ошибки
Алгоритм обратного распространения ошибки, в основе которого лежит градиентный метод, создает ряд проблем при обучении многослойных нейронных сетей. К таким проблемам можно отнести следующие:
- неизвестность выбора числа слоев и количества нейронных элементов в слое для многослойных сетей;
- медленную сходимость градиентного метода с постоянным шагом обучения;
- сложность выбора подходящей скорости обучения a. Так, слишком малая скорость обучения увеличивает время обучения и приводит к скатыванию нейронной сети в локальный минимум. Большая скорость обучения может привести к пропуску глобального минимума и сделать процесс обучения расходящимся;
- невозможность определения точек локального и глобального минимумов, так как градиентный метод их не различает;
- влияние случайной инициализации весовых коэффициентов нейронной сети на поиск минимума функции среднеквадратичной ошибки.
Последний пункт отражает, что при разной инициализации синаптических связей могут получаться различные решения задачи. Это характеризует неустойчивость алгоритма обучения, когда нейронная сеть в одних случаях может обучаться до требуемой суммарной среднеквадратичной ошибки, а в других нет. То, что алгоритм обратного распространения ошибки не позволяет в общем случае достичь глобального минимума, не умаляет его достоинств, так как во многих практических задачах достаточно обучить нейронную сеть до требуемой среднеквадратичной ошибки. Является ли при этом найденный минимум локальным или глобальным, не имеет большого значения.
Адаптивный шаг обучения
Ранее отмечалось, что в стандартном алгоритме обратного распространения ошибки существует проблема выбора подходящего шага обучения, чтобы увеличить быстродействие и обеспечить сходимость алгоритма. Для выбора адаптивного шага обучения a можно использовать метод наискорейшего спуска [4]. В соответствии с ним на каждой итерации обучения нейронной сети необходимо выбирать шаг обучения для каждого слоя таким, чтобы минимизировать среднеквадратичную ошибку сети:

где  ; ;  — число нейронных элементов последнего слоя. — число нейронных элементов последнего слоя.
Выходное значение j-го нейрона зависит от функции активации нейронных элементов и в общем случае определяется следующим образом:

При этом весовые коэффициенты и пороги нейронной сети модифицируются, как:
Среднеквадратичная ошибка нейронной сети:
Тогда для нахождения a(t) необходимо решить следующее уравнение:
Данное уравнение невозможно решить относительно a(t) аналитическим путем. Поэтому в ряде работ для определения адаптивного шага обучения предлагается использовать методы линейного поиска [14]. Однако это связано со значительными вычислениями. Поэтому можно предложить приближенный метод нахождения скорости обучения a(t). Он базируется на разложении функции активации нейронных элементов в ряд Тейлора.
Пусть выходное значение j-го нейрона последнего слоя нейронной сети
где  — выходное значение -го нейрона скрытого слоя. — выходное значение -го нейрона скрытого слоя.
Для определения взвешенной суммы -го нейрона в момент  подставим в (111) выражения (222) и (333): подставим в (111) выражения (222) и (333):
Обозначим:
Тогда можно представить в следующем виде:

Выходное значение j-го нейрона в момент времени t+1:

Разложим по формуле Тейлора и ограничимся первыми двумя членами:

Тогда

Так как

то (888) можно переписать в виде

Для обеспечения адаптивного шага обучения необходимо обеспечить:

Тогда

Откуда

Так как  , то при данном , то при данном  обеспечивается минимум среднеквадратичной ошибки. Найдем выражение для обеспечивается минимум среднеквадратичной ошибки. Найдем выражение для  . Для этого определим: . Для этого определим:


получим:

Исходя из принципа независимости слоев, предполагаем, что
получим приближенное выражение для вычисления адаптивного шага обучения различных слоев нейронной сети:
где  — ошибка -го нейронного элемента.. — ошибка -го нейронного элемента..
Следует отметить, что в приведенном выше выражении вычисляется отдельно для каждого слоя нейронной сети. Как показывают эксперименты, при использовании адаптивного шага обучения могут получаться слишком большие значения . Это может привести к десинхронизации процесса обучения, когда весовые коэффициенты резко изменяются в определенном направлении. В результате изменение среднеквадратичной ошибки с течением времени будет иметь колебательный характер. Поэтому рекомендуется ограничивать по абсолютному значению. Полученное выше выражение для адаптивного шага обучения позволяет значительно повысить скорость обучения нейронной сети и избежать выбора подходящего шага. Это является существенным преимуществом по сравнению со стандартным алгоритмом обратного распространения ошибки. Хотя при удачном выборе постоянного шага обучения данный алгоритм будет сходиться не быстрее, чем метод градиентного спуска.
5. ЭКОНОМИЧЕСКАЯ ЧАСТЬ
5.1 ВВЕДЕНИЕ
Экономическое планирование является нормой любой деятельности, направленной на получение прибыли. Исследования по использованию новых технологий в металлургии имеют экономические предпосылки. В связи с этим желательно предусмотреть в рамках исследовательской работы оценку экономической эффективности новых методов, которая могла бы служить в дальнейшем основанием для проектного решения по этой проблеме.
Как метод экономического планирования выберем составление бизнес-плана. Бизнес-план выступает как объективная оценка собственной деятельности предприятия и, в то же время, необходимый инструмент проектно – инвестиционных решений в соответствии с потребностями рынка. В нем характеризуются основные аспекты коммерческого предприятия, анализируются проблемы, с которыми оно столкнется, и определяются способы их решения. Следовательно, бизнес-план – одновременно поисковая, научно–исследовательская и проектная работа.
Цель бизнес-плана может быть разная, Например, получение кредита или привлечение инвестиций, определение стратегических и тактических ориентиров предприятия и др.
В зависимости от рыночной ситуации цели составления бизнес-плана могут быть различны. Вследствие этого бизнес-планы по объектам бизнеса можно классифицировать в соответствии со схемой (см. приложение 10). Бизнес-планы разрабатываются в различных модификациях в зависимости от назначения: по бизнес линиям (продукция, работы, услуги, технические решения), по предприятию в целом (новому или уже действующему). Бизнес-план может быть нацелен как на развитие предприятия, так и на его финансовое оздоровление. Также может планироваться деятельность всего предприятия или его отдельного подразделения.
Необходимо отметить, что различные экономисты выделяют несколько разные структуры бизнес-планов, однако, все они имеют приблизительно одинаковое строение. Такая структура представлена в приложении 12.
5.2 РАЗРАБОТКА БИЗНЕС-ПЛАНА
5.2.1 Концепция
Целью данного исследования является развитие производственного подразделения. Возможность решения может быть предоставлена внутренними ресурсами предприятия. Проект развития, в основе которого лежат выше проведённые исследования позволит:
- снизить расход топлива и энергоносителей;
- снизить себестоимость продукции;
- повысить производительность и качество;
-
- на много увеличить надёжность работы;
Для реализации проекта потребуются капитальные затраты в размере 3 648 600,00 руб., срок окупаемости которых составит 1,2 года и по истечение пяти лет даст планируемую прибыль 13 636 733,84.
5.2.2 Краткая информация о предприятии
Открытое Акционерное Общество Оскольский электрометаллургический комбинат (ОАО "ОЭМК") – это частное предприятие, вышестоящим органом которого является собрание акционеров.
Адрес: 309500, Белгородская обл., г. Старый Оскол – 15.
E-mail: [email protected]
http://www.oemk.oskol.ru
5.2.3 Характеристика предприятия и продукции
ОЭМК являет собой интегрированное (с полным циклом) металлургическое предприятие, предназначенное для производства высококачественной металлопродукции из стали, выплавленной из металлизованных окатышей (с добавкой металлолома), производство которых, как и производство окисленных окатышей, входит в состав комбината.
Основные достоинства ОЭМК:
1. Принципиально новая технология производства металла, основанная на прямом получении железа из руды по способу "Мидрекс", позволяет исключить из состава комбината такие сильные источники загрязнения атмосферы, как аглофабрика, коксохимическое производство, доменный цех. Практически отсутствуют выбросы в атмосферу серы, фенолов, цианидов и других вредных веществ. Исключение из процесса жидких высоконагретых продуктов при восстановлении окисленных окатышей улучшает условия труда рабочих.
2. Применение металлизованных окатышей в качестве основного шихтового материала для производства стали позволяет получать металл нового уровня качества, особо чистый по содержанию вредных примесей и примесей цветных металлов (в два-три раза ниже, чем в металле, выплавленном традиционными методами). Это особенно важно в связи с возрастающим загрязнением металлолома. Среднее содержание остаточных элементов в стали, выплавленной из металлизованных окатышей, составляет в процентах: серы - 0,006; фосфора - 0,008; никеля - 0,05; меди - 0,06. Впервые регламентировано содержание остаточных цветных металлов в процентах: свинца - менее 0,003; цинка - менее 0,004; сурьмы - менее 0,003; олова - менее 0,01; висмута - менее 0,005.
3. Выплавка высококачественной стали из металлизованных окатышей в сверхмощных электродуговых печах с непрерывной разливкой металла в заготовки сечением 300х360 мм. Выплавка производится в электропечах вместимостью 150 т. с трансформатором мощностью 90 МВА. Для снижения вредных воздействий на окружающую среду электропечь заключена в шумоизолирующий кожух. Материалы по программе подаются в печь или ковш, окатыши и известь в процессе плавки загружаются непрерывно через отверстие в своде печи.
4. Применение системы гидротранспорта для поставки железорудного концентрата (пульпы). Исключены железнодорожный транспорт, парк вагонов, операции погрузки и разгрузки, потери металлов, ручной труд. Процесс бесшумен, легко поддается контролю, регулированию и автоматизации. Транспорт не зависит от природы.
5. Использование для межцеховых и внутрицеховых перевозок не железнодорожного транспорта, а конвейерных систем и специального автотранспорта. Это позволило более компактно расположить цехи, повысить гибкость управления их работой.
6. Использование при обезвоживании концентрата блочной системы фильтрации, при которой каждый фильтр обслуживает отдельный вакуумный насос, что повышает качество фильтрации и стабильность работы оборудования при повышении энерговооруженности процесса.
7. Эксплуатация электро-газовых подстанций на 330/110 и 110/10 кВ повышает надежность работы оборудования и сокращает площади для подстанций. Использование современного оборудования, сырья нового качества и прогрессивных технологических приемов производства и контроля качества (металлизованные окатыши, внепечная обработка жидкого металла, защита от вторичного окисления металла на МНЛЗ, автоматическое поддержание уровня металла в кристаллизаторах, использование шиберных затворов на промежуточных ковшах, водовоздушное вторичное охлаждение заготовок, регламентированное охлаждение литой заготовки, термообработка, обточка, установки неразрушающего контроля проката) позволяют гарантированно получать металлопродукцию заданного высокого качества.
Металлопродукция ОЭМК:
-Окатыши металлизованные термически пассивированные
-Непрерывнолитая заготовка сечением 300х360 мм, длиной 4,2-11,8 м
-Квадратная заготовка для переката со стор. 70-125 мм, длин. 9,1-11,8м
-Сортовой прокат диаметром 80-160 мм, длиной 4,5-5,9 м и 9,1-11,8 м
-Трубная заготовка диаметром 80-160 мм, длиной 9,1-11,8 м
Основные преимущества металла ОЭМК:
-Особая чистота металла по содержанию вредных примесей и газов (кислород, азот).
-Высокая точность проката по диаметру и кривизне.
-Высокая технологическая пластичность металла при горячей и холодной деформации, которая на 10-50% выше, чем на обычном металле, что позволяет обеспечить осадку в горячем и холодном состоянии до 1/4 первоначальной высоты и специальные виды технологических испытаний. Это дает возможность гарантировать отсутствие дефектов при изготовлении деталей у потребителей.
Особенно явно преимущества металла ОЭМК выявляются в мелкосортном и среднесортном прокате. Такой металл обеспечивает осадку на 80-85%, что не может быть достигнуто на любом другом металле и не нормируется ни в отечественных, ни в зарубежных стандартах. При переработке расход металла снижается на 150-200 кг/т, расход инструмента - в 1,3-2,5 раза.
-Повышенные механические и пластические свойства (относительное удлинение и сужение выше на 10-20%, ударная вязкость - на 20%, особенно повышается ударная вязкость при пониженных температурах).
-Высокая чистота поверхности проката.
-Низкая прокаливаемость, суженные пределы по химическому составу обеспечивают лучшую технологичность при термической обработке металла у потребителей.
-Повышенная долговечность деталей.
Редукторы заднего моста и коробки передач автомобилей с деталями из металла ОЭМК имеют изгибно-усталостную прочность шестерен на 20-30% выше, сопротивление усталости коленчатых валов из металла ОЭМК на 30% выше, чем на обычном металле.
Котельные трубы имеют долговечность на 50% выше, чем из обычного металла, стойкость колец подшипников и тел качения из непрерывно-литой заготовки ОЭМК значительно превышает нормируемый показатель.
Все потребители металла ОЭМК подтверждают его высокое качество и эффективность использования для уменьшения брака, снижения расхода металла и инструмента, повышения других показателей, отказа от закупок по импорту. Фирмой TUV CERT (Германия) сертифицированы:
-система качества ОЭМК по Международному стандарту ИСО 9002;
-непрерывнолитая заготовка, сортовой прокат и трубная заготовка по техническим правилам AD-WO\TRD 100;
-арматурные марки стали на знак "U".
ОЭМК является одним из крупнейших в мире металлургических предприятий, производящих металлопродукцию на базе процесса прямого получения железа. Продукция ОАО "ОЭМК" хорошо известна не только на внутреннем, но и на внешнем рынке. Основными потребителями являются машиностроительные, экскаваторные, тракторные, автомобильные, трубные и подшипниковые заводы, в том числе такие крупные как ЗИЛ, ГАЗ, КАМАЗ, БелавтоМАЗ. Благодаря высокому качеству продукция комбината высоко ценится потребителями и уверенно выходит на мировой рынок металла. С 1989 года комбинат экспортирует продукцию в Южную Корею, Тайвань, США, Италию, Югославию и другие страны.
Основными потребителями металлопродукции комбината на внутреннем рынке являются предприятия топливно-энергетического комплекса, тяжелого и автомобильного машиностроения, подшипниковые заводы:
-Первоуральский новотрубный завод (ПНТЗ)
-Синарский трубный завод (СинТЗ)
-Волжский трубный завод
-Белорусский металлургический завод (БМЗ)
-АвтоВАЗ
-ГАЗ
-УАЗ
-Челябинский трубопрокатный завод (ЧТПЗ)
-Орловский сталепрокатный завод (ОСПАЗ)
-Череповецкий сталепрокатный завод (ЧСПЗ)
Из металла ОЭМК изготавливаются шестерни, коленчатые валы, оси, толкатели, втулки, подшипники, котельные трубы, трубы нефтяного сортамента и др. Особенно успешно металл применяется при производстве деталей методами холодной высадки (степень осадки 75%), горячей штамповки, формовки в условиях сложной пластической деформации. Высокопластичные стали эффективны для производства крепежных изделий методом холодной высадки без подготовительной термообработки сортового проката и термообработки готовой продукции.
Благодаря высокому качеству продукция комбината высоко ценится потребителями и уверенно выходит на мировой рынок металла.
5.2.4. План производства
Производство окисленных окатышей
Цех окомкования производит окисленные окатыши из железорудного концентрата Лебединского горнообогатительного комбината, транспортируемого на комбинат по пульпопроводу в виде пульпы на расстояние 26,5 км.Из пульпы на дисковых вакуумных фильтрах получают кек, из которого в свою очередь получают окатыши.
Обжиг окатышей производится на конвейерной машине площадью 480 м2
. Производительность цеха окомкования 2600 тыс. т. в год. Окисленные окатыши имеют размер 5-20 мм, содержание железа в окатышах не менее 67%, кремнезема - не более 3,3%, прочность - не менее 250 кг/окатыш.
Производство металлизованных окатышей
Окисленные окатыши по транспортерам поступают в шахтные печи цеха металлизации. Цех металлизации производит металлизованные окатыши из окисленных окатышей по технологии Мидрекс - нагретым восстановительным газом, полученным из природного газа после его конверсии в реформерах. В цехе имеются четыре установки металлизации общей производительностью 1800 тыс. тонн в год, на которых производятся пассивированные металлизованные окатыши, которые передаются в электросталеплавильный цех комбината, и отгружаются другим металлургическим заводам, а также на экспорт. Они пригодны для перевозки в открытых вагонах, речным и морским транспортом. Таким образом, план производства продукции представлен на рис. 6.1.
Металлизованные термически пассивированные окатыши ОЭМК - это высококачественное металлургическое сырье, полученное в установках металлизации по специальной технологии, обеспечивающей низкую склонность к вторичному окислению при увлажнении. Владельцем "ноу-хау" технологии пассивации металлизованных окатышей является ОЭМК.
Достоинством окатышей являются:
-высокое содержание железа;
-широкий диапазон регулирования степени металлизации и содержания углерода;
-низкое содержание серы, фосфора и цветных металлов;
-низкая склонность к вторичному окислению.
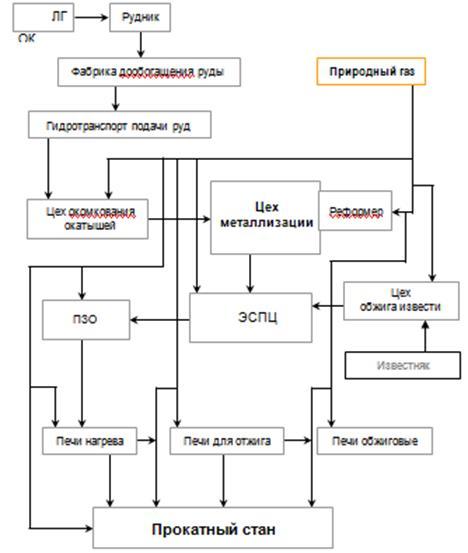
Рис. 5.1. План производства продукции ОЭМК
Таблица 5.1. Химический состав металлизованных окатышей, вес %:
| Fe общ. |
90,0 (минимум) |
Cao+SiО2 |
6,0 (максимум) |
| Fe мет. |
86,0 (минимум) |
S |
0,005 (максимум) |
| С |
1,2 (минимум) |
P |
0,015 (максимум) |
Содержание остаточных элементов и примесей цветных металлов (Cu, Ni, As, Sn, Pb, Zn, Sb, Biи т.д.) в металлизованных окатышах в10 и более раз ниже, чем в металлоломе.
Таблица 5.2.Физические свойства:
| Средний размер - 5-20мм |
| Прочность - более 100 кг/окатыш |
| Насыпной вес - 1,9 - 2,1 т/м3 |
5.2.5 Вспомогательные цеха и службы
Работа основных цехов комбината обеспечивается энергетическим и ремонтно-механическим хозяйством в составе электроэнергоремонтных и механоремонтных цехов.
Техническое управление охватывает все основные производства комбината, оснащено современным химико-аналитическим, контрольно-испытательным, металлографическим и специальным исследовательским оборудованием, изготовленным ведущими фирмами ФРГ, Японии и др., и имеет большие возможности для проведения исследований по различным направлениям.
5.2.6 Автоматизация производства
ОЭМК - это высокоавтоматизированное производство. Интегрированная автоматизированная система управления комбинатом является многоуровневой и построена по иерархическому принципу.
Верхний уровень управления комбинатом поддерживается информационной системой класса ERP на базе R/3 SAP, которая совместно с локальными цеховыми системами обеспечивает выполнение основных бизнес-процессов.
Цеховые системы автоматизации, в свою очередь, имеют три уровня:
- на уровне цеховых АСУ решаются задачи сменно-суточного планирования выплавки стали и производства проката, слежения за металлом на всех переделах производства, формирования базы данных по технологическим маршрутам обработки металла, анализа данных, выдачи отчетных документов;
- на следующем уровне реализуются программы автоматизированного управления технологическими процессами и основными агрегатами (электродуговыми и термическими печами, машинами непрерывной разливки стали, прокатными клетями и т.д.);
- на уровне базисной автоматизации решаются задачи локального управления и регулирования, а также сбора и первичной обработки информации о ходе технологического процесса и сопряжения с другими системами.
Интеграцию всех автоматизированных систем в единое информационное пространство обеспечивает отказоустойчивая и высокоскоростная корпоративная оптоволоконная сеть.
5.2.7 Персонал и управление
Центральное место в материальном стимулировании результатов труда занимает организация заработной платы. Организация заработной платы производится в соответствии с требованиями ряда объективных экономических законов (в частности, закона повышения производительности труда).
Статьей 132 КЗоТ закреплено положение о том, что размер оплаты труда работника зависит только от его личного трудового вклада, качества труда и не ограничивается максимум. На предприятиях и в организациях всех отраслей промышленности России действует государственный документ – "Единый тарифно-квалификационный справочник работ и профессий" (ЕТКС).
Организационная структура управления цехом окомкования и металлизации представлена на рис. 6.2.
5.2.8 Финансовый план
При определении экономического аспекта эффективности капитальных вложений должен достигаться наиболее полный учет затрат в основные и смежные производства, должна быть выявлена общая сумма эффекта от этих затрат как у производителя, так и у потребителя.
Общая экономическая эффективность определяется как отношение эффекта к капитальным затратам, вызвавшим этот эффект.
Сравнение различных вариантов инвестиционного проекта и выбор лучшего из них рекомендуется производить с использованием различных показателей, к которым относятся:
а) чистый дисконтированный доход (ЧДД) или интегральный эффект;
б) индекс доходности (ИД);
в) внутренняя норма дисконта (ВНД);
г) срок окупаемости;
Чистый дисконтированный доход — превышение интегральных результатов над интегральными затратами. Определяется как сумма текущих эффектов за весь расчетный период, приведенная к начальному шагу.
Если в течение расчетного периода не происходит инфляционного изменения цен или расчет производится в базовых ценах, то величина ЧДД для постоянной нормы дисконта вычисляется по формуле:
 (6.1) (6.1)
где Дt
— результаты, достигаемые на t-ом шаге расчета;
Рt
— затраты, осуществляемые на том же шаге;
α – норма дисконта (α=0.18);
Дt
– Рt
- эффект достигаемый на t-ом шаге.
Если ЧДД инвестиционного проекта положителен, то проект является эффективным (при данной норме дисконта), и может рассматриваться вопрос о его принятии. Чем больше ЧДД, тем эффективнее проект. Если инвестиционный проект будет осуществлен при отрицательном ЧДД, инвестор понесет убытки (проект неэффективен).
Индекс доходности — представляет собой отношение суммы приведенных эффектов к величине капитальных вложений:
 (6.2) (6.2)
Индекс доходности строится из тех же элементов, что и ЧДД. Если ЧДД положителен, то ИД > 1 и наоборот.
Внутренняя норма дисконта представляет собой ту норму дисконта α, при которой значение приведенных эффектов равно приведенным капитальным вложениям.
ВНД является решением уравнения:
 (6.3) (6.3)
Расчет ЧДД инвестиционного проекта показывает, является ли он эффективным при некоторой заданной норме дисконта a; ВНД проекта определяется в процессе расчета и затем сравнивается с требуемой инвестором нормой дохода на вкладываемый капитал.
Срок окупаемости — минимальный временной интервал (от начала осуществления проекта), за пределами которого интегральный эффект становится и в дальнейшем остается неотрицательным, т.е. это период (измеряемый в месяцах, кварталах или годах), начиная с которого первоначальные вложения и другие затраты, связанные с инвестиционным проектом, покрываются суммарными результатами его осуществления.
Внедрение разработанной системы управления ведет к повышению производительности шахтных печей. Расчет экономической эффективности будет производиться для повышения производительности на 0,2 % и снижения расхода природного газа на 0,1 % в год по мере улучшения функционирования системы, хотя по прогнозам эффект может быть значительно больше. В таблице 6.1 приведены себестоимости 1 т металлизованных окатышей до и после внедрения системы. До внедрения производительность одного модуля составляла 450 000 т. в год.
Таблица 6.3. Калькуляция себестоимости 1 т металлизованных окатышей до и после внедрения
| Статьи затрат |
до внедрения |
после внедрения |
+/-, руб. |
| Цена, руб. |
Кол-во, т |
Сумма
руб.
|
кол-во,т |
Сумма
руб.
|
1. Сырье и основные материалы:
- окисленные окатыши
- металлосодержащие отходы
- подготовка отходов
ИТОГО
|
200,04
67,0
6,71
-
|
1,382
0,012
-
1,394
|
276,46
0,8
-
277,26
|
1,382
0,012
-
1,394
|
276,46
0.8
-
277,26
|
-
-
|
| 2. Отходы (-) |
- |
0,3940 |
1,84 |
0,3900 |
1,84 |
- |
| 3. Вспомогательные материалы |
- |
- |
2,41 |
- |
2,41 |
- |
4. Топливо технологическое:
- газ природный 1000 м3
|
-
|
-
|
71,9
|
-
|
71,8
|
-0,1
|
5. Расходы по переделу:
- электроэнергия
- оплата труда
- отчисления на соц. нужды
- износ инструмента, приспособлений целевого назначения
- содержание основных средств
- внутризаводское перемещение грузов
- амортизация основных средств
- затраты на капитальный ремонт
- затраты на текущий ремонт
- прочие расходы
ИТОГО
|
-
-
-
-
-
-
-
-
-
-
-
|
-
-
-
-
-
-
-
-
-
-
-
|
35,82
7,17
2,65
0,21
1,88
1,58
8,08
22,2
7,15
1,1
87,84
|
-
-
-
-
-
-
-
-
-
-
-
|
35,80
7,6
2,55
0,21
1,86
1,58
8,0
19,5
2,25
1,1
80,45
|
-0,02
+0,43
- 0,1
-
- 0,02
-
- 0,08
- 2,7
- 4,9
-
- 7,39
|
| Цеховая себестоимость |
- |
- |
437,57 |
- |
430,1 |
- 7,56 |
| Общезаводские расходы |
- |
- |
18,45 |
- |
18,45 |
- |
| Производственная себестоимость |
- |
- |
456,02 |
- |
448,46 |
| Коммерческие расходы |
- |
73000 |
88,93 |
73000 |
88,93 |
- |
| Полная себестоимость товарной продукции |
- |
73000 |
544,95 |
73000 |
537,39 |
- 7,56 |
Таким образом, при равномерной производительности один модуль произведёт 450 900 т. продукции за год внедрения системы, причём годовой доход при этом составит:
(544,95 – 537,39) × 450900 = 3 423 532,5 руб.
Статьи капитальных затрат на создание системы управления приведены в таблице 6.4., а также приведены экономия от внедрения системы, затраты на ее внедрение и обслуживание в течение 5 лет. Зная экономию и затраты можно рассчитать ЧДД, ИД (см. таблицу 6.5.).
Срок окупаемости определяем по графику ЧДД (см. рис. 6.3).
Таблица 5.4. Статьи расходов и доходов на внедрение системы за 5 лет
| Период |
Расходы/Доходы |
Сумма |
| 1 год |
Расходы |
| 1. Закупка программных средств |
| Программа Neuro Solutions 4.0 |
15 500,00 |
| Программа TRACE MODE 5.08 |
33 100,00 |
| Операционная система WindowsNT 2000 Server |
25 000,00 |
| 2. Разработка проекта и документации |
2 750 000,00 |
| 3. Внедрение и наладка |
480 000,00 |
| 4. Обслуживание системы |
160 000,00 |
| 5. Обучение и подготовка персонала |
185 000,00 |
| ИТОГО |
3 648 600,00 |
| Доходы |
| 1. Повышение производительности |
456 699,24 |
| 2. Снижение расхода природного газа |
2 966 833,26 |
| ИТОГО |
3 423 532,50 |
| 2 год |
Расходы |
| 1. Обслуживание системы |
130 000,00 |
| 2. Обучение и подготовка персонала |
155 000,00 |
| ИТОГО |
285 000,00 |
| Доходы |
| 1. Повышение производительности на 0,2 % |
457 612,64 |
| 2. Снижение расхода природного газа на 0,1 % |
2 969 800,09 |
| 3. Повышение качества продукции (степ. Металл, % углерода) |
120 300,00 |
| 4. Снижение аварий и простоев за счёт повышения надёжности |
71 275,20 |
| ИТОГО |
3 618 987,73 |
| 3 год |
Расходы |
| 1. Обслуживание системы |
100 000,00 |
| 2. Обучение и подготовка персонала |
140 000,00 |
| ИТОГО |
240 000,00 |
| Доходы |
| 1. Повышение производительности |
458 527,84 |
| 2. Снижение расхода природного газа |
2 972 769,89 |
| 3. Повышение качества продукции |
180 440,00 |
| 4. Снижение аварий и простоев за счёт повышения надёжности |
106 912,80 |
| ИТОГО |
3 718 650,53 |
| 4 год |
Расходы |
| 1. Обслуживание системы |
100 000,00 |
| 2. Обучение и подготовка персонала |
100 000,00 |
| ИТОГО |
200 000,00 |
| Доходы |
| 1. Повышение производительности |
459 444,90 |
| 2. Снижение расхода природного газа |
2 975 742,69 |
| 3. Повышение качества продукции |
180 460,00 |
| 4. Снижение аварий и простоев за счёт повышения надёжности |
106 942,80 |
| ИТОГО |
3 722 600,39 |
| 5 год |
Расходы |
| 1. Обслуживание системы |
100 000,00 |
| 2. Обучение и подготовка персонала |
100 000,00 |
| ИТОГО |
200 000,00 |
| Доходы |
| 1. Повышение производительности |
460 363,80 |
| 2. Снижение расхода природного газа |
2 978 718,39 |
| 3. Повышение качества продукции |
180 500,00 |
| 4. Снижение аварий и простоев за счёт повышения надёжности |
106 980,50 |
| ИТОГО |
3 726 562,69 |
Учитывая, что отделение цеха металлизации содержит 4 модуля прямого восстановления, получим:
Таблица 5.5. Показатели экономической эффективности
Показатели
Периоды
|
Доход, руб. |
Расход, руб. |
1/(1+a)2
|
Дисконтированный доход, руб. |
| 1 |
3 423 532,50 |
3 648 600,00 |
0,85 |
2 910 002,63 |
| 2 |
3 618 987,73 |
285 000,00 |
0,72 |
2 605 671,17 |
| 3 |
3 718 650,53 |
240 000,00 |
0,61 |
2 268 376,82 |
| 4 |
3 722 600,39 |
200 000,00 |
0,52 |
1 935 752,20 |
| 5 |
3 726 562,69 |
200 000,00 |
0,44 |
1 639 687,58 |
| Итого |
18 210 333,84 |
4 573 600,00 |
11 359 490,40 |
Показатели
Периоды
|
Дисконтированный
Расход, руб.
|
Годовой экономический эффект без дисконта, руб. |
ИД |
ЧДД |
| 1 |
3 101 310,00 |
-225 067,50 |
0,93 |
-162 611,27 |
| 2 |
205 200,00 |
3 333 987,73 |
12,70 |
1 877 789,22 |
| 3 |
146 400,00 |
3 478 650,53 |
15,49 |
3 681 469,52 |
| 4 |
104 000,00 |
3 522 600,39 |
18,61 |
5 238 458,89 |
| 5 |
88 000,00 |
3 526 562,69 |
18,63 |
6 557 393,34 |
| Итого |
3 644 910,00 |
3,12 |
Анализируя график видно, что срок окупаемости составляет 1,2 года.
5.3 ВЫВОДЫ
Расчёты подтверждают высокую эффективность внедрения результатов проведённых исследований. Срок окупаемости затрат оказался достаточно коротким, а экономия средств, т.е. прибыль – высокая.
Высокий эффект достигается за счёт универсальности нейронных технологий, которые характеризуются:
- высокой надёжностью;
- быстродействием;
- обучением;
Данные и другие свойства сказываются на повышении качества ведения процесса по мере внедрения системы. Если учитывать, что совершенствование систем способных к самообучнию бесконечно, то значит можно предположить, что и рост экономического эффекта тоже будет продолжаться достаточно долго.
6. ОХРАНА ТРУДА И ОКРУЖАЮЩЕЙ СРЕДЫ
6.1 ОСНОВНЫЕ ПОЛОЖЕНИЯ
6.1.1 Правовая база
Требования к охране труда и технике безопасности строго регламентированы набором законов и норм, к которым относятся:
Конституция Российской Федерации (статьи: 2, 7, 24, 37, 41, 42, 45, 60), Трудовой кодекс Российской Федерации, Федеральный Закон "О промышленной безопасности производственных объектов" от 20 июня 1997 года. Настоящий Федеральный закон устанавливает правовые основы регулирования отношений в области охраны труда между работодателями и работниками и направлен на создание условий труда, соответствующих требованиям сохранения жизни и здоровья работников в процессе трудовой деятельности, Закон Белгородской области от 5 апреля 1999 г.
Правовая основа вопросов охраны труда заложена в "Основах законодательства о труде" и "Основах законодательства о здравоохранении". Законодательными документами в области охраны труда являются государственные стандарты, правила и нормы, в которых содержатся конкретные требования по безопасности труда. Система стандартов безопасности труда (ССБТ) содержит государственные стандарты общих требований и нормы по видам опасных и вредных производственных факторов, и стандарты общих требований безопасности к производственному оборудованию, производственным процессам, средствам защиты работающих. Различают единые, межотраслевые и отраслевые правила и нормы по охране труда. Единые правила и нормы распространяются на все отрасли народного хозяйства, межотраслевые – только на отдельные виды производств, но в масштабах всей страны.
6.1.2 Понятия и термины
Охрана труда – это система законодательных актов и соответствующих им социально-экономических, технических, гигиенических и организационных мероприятий, обеспечивающих безопасность, сохранение здоровья и работоспособности человека в процессе труда.
Задача охраны труда – свести к минимуму вероятность поражения или заболевания работающего с одновременным обеспечением комфорта при максимальной производительности труда. Реальные производственные условия характеризуются, как правило, наличием некоторых производственных опасностей.
Условия труда - совокупность факторов, оказывающих воздействие на человека и результаты его труда. Одной из важнейших характеристик условий труда является наличие опасных и вредных производственных факторов.
Производственная опасность – это возможность воздействия на работающих опасных и вредных факторов.
Производственная санитария включает в себя комплекс организационных, гигиенических и санитарно-технических мероприятий и средств, предотвращающих воздействие на работающих вредных производственных факторов.
6.2 АНАЛИЗ УСЛОВИЙ ТРУДА
6.2.1 Опасные производственные факторы
К опасным производственным факторам относят такие, воздействие которых на работающего приводит к травме:
- пожароопасность;
- электрический ток;
- загазованность;
- запыленность.
Пожаробезопасность
Противопожарная защита - это комплекс организационных и технических мероприятий, направленных на обеспечение предотвращения пожара, ограничение его распространения, а также создания условий для успешного тушения пожара.
Пожары в помещениях с автоматически работающими устройствами представляют собой достаточную опасность, так как сопряжены с большими потерями. Как известно, пожар может возникнуть при взаимодействии горючих веществ, окислителя и источника зажигания.
Одной из наиболее важных задач пожарной защиты является защита строительных помещений от разрушений и обеспечение их достаточной прочности в условиях воздействия высоких температур при пожаре. Учитывая высокую стоимость электронного оборудования, а также категорию его пожарной опасности, помещение для данного оборудования и части здания другого назначения, в которых предусмотрено размещение дорогостоящего оборудования, должны быть 1 и 2 степени огнестойкости.
К средствам тушения пожара, предназначенным для локализации небольших возгораний, относятся пожарные стволы, внутренние пожарные водопроводы, огнетушители, сухой песок, асбестовые одеяла и т. п.
Для тушения пожаров на начальных стадиях широко применяются огнетушители. По виду используемого огнетушащего вещества огнетушители подразделяются на следующие основные группы:
- пенные огнетушители, которые применяются для тушения горящих жидкостей, различных материалов, конструктивных элементов и оборудования, кроме электрооборудования, находящегося под напряжением.
- газовые и порошковые огнетушители применяются для тушения жидких и твердых веществ, а также электроустановок, находящихся под напряжением.
В помещениях с работающими электроустановками применяются, главным образом, углекислотные и порошковые огнетушители, достоинством которых является высокая эффективность тушения пожара, сохранность электронного оборудования, диэлектрические свойства углекислого газа и тушащего порошка, что позволяет использовать эти огнетушители даже в том случае, когда не удается обесточить электроустановку сразу.
Для обнаружения начальной стадии загорания и оповещения службы пожарной охраны используют системы автоматической пожарной сигнализации (АПС). Кроме того, они могут самостоятельно приводить в действие установки пожаротушения, когда пожар еще не достиг больших размеров. Помещение цеха оборудовано приточно-вытяжной вентиляцией.
К противопожарному инвентарю и устройствам должны предъявляться требования, установленные "Правилами пожарной безопасности":
- весь пожарный инвентарь, противопожарное оборудование и первичные средства тушения пожара должны содержаться в исправном состоянии, находиться на видном месте, при надобности в любое время суток к ним должен быть обеспечен беспрепятственный доступ.
- все стационарные и переносные средства пожаротушения должны периодически проверяться и испытываться.
Отверстия в перекрытиях, через которые проходят кабели или волноводы, должны быть плотно закрыты асбестом и герметизированы цементным раствором или другим несгораемым материалом.
Электрический ток
Современное производство характеризуется широким применением различных электроустановок. В этой связи большое значение в общей системе мероприятий по охране труда приобретают вопросы обеспечения электробезопасности. Электроустановки и их части должны быть выполнены таким образом, чтобы люди, обслуживающие их, не подвергались опасным и вредным воздействиям электрического тока и соответствовать требованиям электробезопасности в течение всего срока службы.
Одним из основных факторов риска в промышленных помещениях является опасность поражения технического персонала электрическим током. Напряжение питающей сети 220/380В - напряжение опасное для человеческой жизни. Поэтому следует провести заземление внутри помещения и заземлить металлические корпуса элементов установки. Для выделения электроопасных участков помещения следует окрасить шину заземления в соответствии с ГОСТом рядом с розетками, к которым подведено напряжение 220/380В и нанести красной краской надпись: "220 V" или "380 V". При дальнейшей эксплуатации своевременно производить проверку контура заземления.
Загазованность
В реформере из смеси технологического и природного газов производится конвертированный газ, который используется в шахтной печи для восстановления оксидов железа. Во всех вышеперечисленных газах присутствуют такие компоненты: метан (СН4
), диоксид углерода (СО2
), водород (Н2
), оксид углерода (СО), азот (N2
), вода (Н2
О) и кислород (О2
). Также в дымовых газах присутствуют окислы азота (NО2
) и незначительное содержание сернистых соединений (SО2
и SО3
).
Наибольшую опасность представляют такие газообразные компоненты как: метан, водород, оксид азота и оксид углерода.
Метан (~94 %) содержится в природном газе, который применяется как для производства восстановительного газа, так и для отопления реформера.
Природный газ не имеет запаха, цвета, вкуса, легче воздуха в 1,72 раза. При взаимодействии с кислородом образует взрывоопасные смеси. На человека действует удушающе. Содержание природного газа свыше 10 % в замкнутом пространстве может привести к смерти от недостатка воздуха. Для придания запаха в природный газ добавляют этилмеркаптан (16 г на 1000 м3
).
Водород – газ без цвета и запаха. Основная опасность этого элемента состоит в том, что при контакте с окислителем образуется взрывоопасная смесь, которая при определенных условиях может воспламениться. Для предотвращения образования таких смесей предусматривается продувка трубопроводов инертным газом с целью вытеснения газов, представляющих опасность.
Диоксид азота при обычной температуре и большой концентрации – это пары красно-бурого цвета, которые образуются при окислении NО. NО2
хорошо растворяется в воде с образованием азотной кислоты (НNО3
), которая обладает резким удушливым запахом. ПДК разовая и среднесуточная равна 0,085 мг/м3
.
NО2
при вдыхании образует в организме азотную и азотистую кислоты. В дыхательных путях эти кислоты соединяются с щелочами тканей и в результате образуются нитраты и нитриты, которые и оказывают раздражающие действия (расширяют сосуды, снижают кровяное давление). При систематическом воздействии окислов азота наблюдается заболевание бронхитами, желудочно-кишечными болезнями, разрушение зубов.
Оксид углерода – ядовитый газ, не обладает цветом, вкусом, запахом, не раздражает слизистых оболочек. Обладает сильным удушающим действием на человека. При концентрации СО в количестве 20 мг/м3
вызывает нарушение жизнедеятельности.
В цехе металлизации производится постоянный контроль на присутствие опасных для здоровья газов в административно-бытовых помещениях, а так же систематические отборы проб на содержание СО на рабочих местах, даже если они находятся на открытом воздухе.
Лица, работающие в газоопасных местах должны пользоваться противогазами.
Запыленность
Пыль – вид аэрозоля, дисперсная система, состоящая из мелких твердых частиц, находящихся во взвешенном состоянии в газовой среде. Пыль отрицательно влияет на организм человека.
Под воздействием пыли могут возникать такие заболевания, как экземы, дерматиты, конъюнктивиты и др. Чем мельче пыль, тем она опаснее для человека. При попадании в легкие при дыхании пыль задерживается в них и может стать причиной заболевания. Существует три пути проникновения пыли в организм человека: через органы дыхания, желудочно-кишечный тракт и кожу. Помимо этого пыль ухудшает видимость на рабочих площадках, снижает светоотдачу осветительных приборов, повышает абразивный износ трущихся деталей машин и механизмов.
Пыль образуется вследствие дробления и истирания исходных материалов и полуфабрикатов, при транспортировке (в местах перегрузки) и складировании окатышей. Основным источником образования пыли в цехе металлизации является шахтная печь. В ней происходит выделение пыли в местах загрузки окисленных и выгрузки металлизованных окатышей, и на маятниковом питателе.
С целью уменьшения попадания пыли в атмосферу и производственные помещения места разгрузок и выгрузок герметично закрываются защитными укрытиями и кожухами, которые подключаются к технологическим аспирационным установкам для отсоса и очистки запыленного воздуха.
Для очистки аспирационного воздуха от пыли используются мокрые пылеотделители – центробежные скрубберы. Степень очистки воздуха достигается очень высокая: от 87,5 до 97,38 %.
6.2.2 Вредные производственные факторы
К вредным производственным факторам относятся такие, воздействие которых на работающего приводит к заболеванию:
- шум;
- вибрация.
Шум и вибрация
Шум естественным образом сопутствует технологическому процессу цеха металлизации. Его источниками являются электродвигатели, компрессоры и т.д.
Вибрация - ощущаемые человеческим организмом низкочастотные колебания твердых тел.
Повышение уровня шума на рабочих местах неблагоприятно сказывается на организме человека и результатах его деятельности. При длительном воздействии шума снижается острота слуха, изменяется кровяное давление, ослабляется внимание, ухудшается зрение, происходят изменения в двигательных центрах, вызывающие нарушение координации движений. Увеличение шума с 76 до 96 дБ снижает производительность физического труда на 20 - 22 %, а умственного - более чем на 40 %. Значительно увеличивается расход энергии при одинаковой физической нагрузке. Интенсивный шум, и в особенности вибрация, являются причиной патологических изменений сердечно-сосудистой системы, желудка и ряда других функциональных нарушений в организме человека. Мерами по снижению и ликвидации неблагоприятного воздействия повышенного уровня шума и вибрации на организм человека являются:
- своевременное техническое обслуживание и ремонт оборудования и других источников шума и вибрации (снижение трения, устранение соударений и дисбаланса движущихся масс);
- использование звукоизолирующих и звукопоглощающих материалов;
- использование средств индивидуальной защиты (противошумные вкладыши "Беруши", наушники и шлемы).
6.3 ОКРУЖАЮЩЕЙ СРЕДЫ
6.3.1 Характеристика выбросов цеха металлизации
После ввода в действие цеха металлизации его установки газоочистки работают удовлетворительно. Пыль в атмосферу попадает с дымовыми газами и с аспирационным газом от скруббера с радиальной подачей воды, очищающего газы из разгрузочного устройства шахтной печи. Благодаря хорошей работе скруббера колошникового газа запыленность последнего снижается с 1,7 г/м3
до 4 мг/м3
и выбросы пыли в атмосферу из дымовой трубы составляют ~10 кг/сут.
В скруббере с радиальной подачей воды аспирационный газ очищается от 12 ¸ 13 г/м3
до 70 ¸ 80 мг/м3
и выбросы пыли в атмосферу составляют ~120 кг/сут. Всю уловленную пыль (~25 т/сут) подают в сгуститель отделения окомкования и используют для производства окисленных окатышей. Кроме пыли в отделении металлизации выбрасывается в атмосферу в сутки до 600 кг оксида углерода и 350 кг оксидов азота. Анализ дымовых газов показал очень малое содержание в них сернистых соединений.
6.3.2 Влияния производства на экологию
Производство металлизованных окатышей - процесс, сопровождающийся образованием различной пыли и газов, которые загрязняют атмосферу. Поэтому на ОЭМК в управлении главного энергетика (УГЭ) создана лаборатория защиты воздушного и водного бассейна, которая осуществляет контроль за количеством выбросов.
Так как рабочее место оператора пульта управления находится в кондиционированном помещении, защищенном от пыли, шума, тепловых излучений, вредное влияние выбросов на организм человека не рассматривается.
6.4 ОХРАНА ТРУДА
6.4.1 Общие положения
Для работы на предприятиях черной металлургии допускаются лица не моложе 18 лет и прошедшие медицинское освидетельствование. Инженерно-технические работники и рабочие, вновь поступающие на работу, а также учащиеся и студенты, прибывшие на производственное обучение или практику, должны пройти вводный инструктаж в кабинете охраны труда.
Вводный инструктаж должен проводиться по программе, разработанной с учетом требований системы стандартов безопасности труда (ССБТ), всех особенностей производства и утвержденной главным инженером предприятия. О проведении вводного инструктажа должна быть сделана запись в журнале регистрации вводного инструктажа (личной карточке инструктажа). В журнале (карточке) расписывается лицо, прошедшее инструктаж, и лицо, проводившее его. Все рабочие, вновь принятые на работу, или переведенные из одного цеха в другой перед допуском к работе должны непосредственно на рабочем месте пройти первичный инструктаж по безопасным методам работы.
К самостоятельной работе у печей, металлургических агрегатов и машин, к обслуживанию и ремонту систем охлаждения печей, газо- и кислородопроводов, газового и кислородного оборудования, машин и механизмов по производству газосварочных работ допускаются рабочие, прошедшие соответствующую подготовку, сдавшие экзамен и получившие удостоверение.
Рабочие не реже одного раза в квартал должны проходить повторный инструктаж по безопасным методам работы.
Внеплановый инструктаж рабочих должен проводиться в случаях:
- ввода в действие новых или переработанных в установленном порядке инструкций по безопасности труда;
- нарушения рабочими инструкций по безопасности труда;
- перевода на временную работу, требующую дополнительных знаний;
- перерыва в работе более 30 календарных дней.
Данные о проведении инструктажей (первичного, повторного, внепланового) должны заноситься в журнал регистрации инструктажа на рабочем месте. В журнале расписывается рабочий, прошедший инструктаж, и лицо, проводившее его, при этом указывается наименование или номер инструкции, по которой был проинструктирован рабочий.
Рабочие не реже одного раза в год должны проходить проверку знаний инструкций по безопасности труда в комиссиях, назначаемых начальником цеха. Результаты проверки должны оформляться протоколом и заноситься в журнал регистрации инструктажа на рабочем месте.
6.4.2 Безопасность технологического процесса
Безопасное ведение процесса металлизации обеспечивается за счет применения автоматического регулирования, дистанционного управления и надежной системы сигнализации. Для улучшения условий труда предусматривается механизация всех технологических процессов и транспорта.
6.4.3 Вредные факторы при управлении процессом
В процессах управления большое значение имеют движение информации и переработка. Основные задачи оператора – контроль за работой системы управления, предупреждения аварий, выявление возникающих неисправностей.
Для управления процессом необходимо воспринимать и перерабатывать большой объем информации, в результате чего оператор испытывает нервные перенапряжения.
Оценка способности оператора к переработке информации иллюстрируется графиком на рис. 7.1. Оптимальное количество информации для человека составляет 0,1 – 5,6 бит/с (бит – единица количества информации, получаемой при осуществлении одного из двух равновероятных событий, т.е. является двоичной единицей информации). Увеличение количества информации снижает скорость ее приема, оператор начинает ошибаться в приеме входных сигналов и искажать их сам. Уменьшение потока информации приводит к тому, что в результате монотонности и бедности внешних воздействий могут возникнуть явления, сходные с переутомлением: увеличивается число ошибок, снижается эмоциональный тонус.
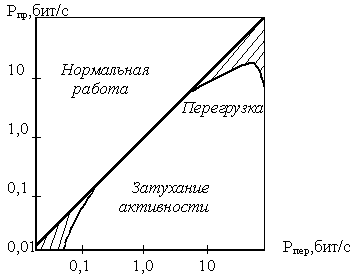
Рис. 7.1 Оценка способности оператора к переработке информации:
Рпр
– скорость приема информации;
Рпер
– скорость переработки информации.
Управление машиной будет надежным и эффективным, в том случае, когда информация, поступающая от машины и требующая активной переработки, будет соответствовать пропускной способности человека 7+2 бит/с.
Так применение интеллектуальной системы автоматического управления поможет свести влияние этого вредного фактора к минимуму, поскольку возьмёт на себя практически всю работу по анализу и управлению.
6.4.4 Рабочее место оператора
Обеспечение рабочему условий высокопроизводительного и безопасного труда заключается в согласовании характеристик человека и машины, в соответствующей организации рабочего места и создании нормальных, здоровых условий труда.
Рабочим местом считается место постоянного или периодического пребывания работающего для наблюдения и ведения производственных процессов. Организация рабочего места заключается в выборе рабочей позы, определении рабочих зон и размещении органов управления и отображения.
В связи с автоматизацией работы позы становятся статичными, т.е. человек сидит у пульта управления в малоподвижной позе. Лишение рабочего двигательной активности вызывает утомление, поэтому особое значение приобретают специальные физические упражнения, снижающие его.
Часть пространства рабочего места, в котором осуществляются трудовые процессы, может быть разделена на зоны. Если рассмотреть, к примеру, сидячую рабочую позу, то положение сидя может стать наилучшим только при условии, если рабочая зона правильно сконструирована.
Правильное конструирование рабочих зон, прежде всего, заключается в строгом соответствии их оптимальному полю зрения оператора. Рабочая зона определяется дугами, которые может описать рука, поворачивающаяся в плече или в локте на уровне рабочей поверхности, а движением рук управляет мозг человека в соответствии с коррекцией глаз.
6.4.5 Расчет освещенности рабочего места оператора
Одним из важнейших параметров производственной обстановки является освещение. Рациональное освещение обеспечивает достаточные условия для осуществления работающими своих функциональных обязанностей. Плохое освещение не позволяет воспринимать необходимую информацию, вызывает напряжение нервной системы и может привести к ошибочным действиям.
К освещению производственных помещений предъявляются следующие требования: обеспечение достаточной освещенности на рабочих поверхностях, высокое качество, надежность, удобство управления и обслуживания, экономичность сооружения и эксплуатации, обеспечение пожарной и электробезопасности.
Достаточная освещенность на рабочих поверхностях обеспечивается выполнением нормативных требований, устанавливающих нормы освещенности в зависимости от характеристики зрительной работы, определяемой степенью ее точности, т.е. объектом различения. СниП II-4-79 "Естественное и искусственное освещение" предусматривает нормативы освещенности для восьми разрядов зрительной работы.
Наименьший размер объекта различения на рабочем месте оператора пульта управления – 1-5 мм, поэтому характеристика зрительной работы относится к V разряду – "Малой точности" (норма общей освещенности на рабочих местах – 200 лк).
Помещения, в которых расположены пульты управления, не имеют оконных проемов, чтобы защитить оборудование от вредного воздействия пыли. Поэтому освещение в помещении полностью искусственное.
Для освещения помещений применяют газоразрядные лампы низкого и высокого давления – люминесцентные, металлогалогенные, натриевые, ксеноновые, ДРЛ.
При освещении помещений газоразрядными лампами, питаемыми переменным током промышленной частоты (50 Гц), возможна пульсация освещенности. В этом случае допускается значение коэффициента пульсации 20%. Для снижения величины колебаний светового потока люминесцентных ламп используют следующие схемы включения: соседние лампы (или светильники) включают в разные фазы трехфазной электрической сети, применяют специальные двухламповые схемы с искусственным сдвигом фаз при помощи конденсатора, включенного в цепь одной из пары ламп.
Коэффициент пульсации освещенности - критерий оценки относительной глубины колебаний освещенности в результате изменения во времени светового потока газоразрядных ламп при питании их переменным током.
Под показателем дискомфорта принимают критерий оценки дискомфортной блескости, вызывающий неприятное ощущение при неравномерном распределении яркостей в поле зрения.
Определяем количество светильников общего освещения люминесцентными лампами:
 (7.1) (7.1)
где Е – нормируемая освещенность, 200лк;
S – площадь помещения, 100 м2
;
kз
– коэффициент запаса, 1,3;
Fл
– световой поток лампы, 2600 лм;
h - коэффициент использования светового потока, 1;
z – поправочный коэффициент, 0,85;
n – количество ламп в светильнике, 1.
Для получения равномерной горизонтальной освещенности светильники с люминесцентными лампами располагаем сплошными рядами вдоль длинной стороны помещения и принимаем необходимые для уровня освещенности 200 лк расстояния между центрами светильников и рядами светильников.
Согласно ГОСТ 13828-74 выбираем тип люминесцентной лампы ЛБ и расстояние между центрами светильников в ряду: L = 3,3 м.
Число светильников в ряду: М = В/L = 20/3,3 = 6.
Число рядов: m = N/M = 12/6 = 2.
Используя данные ГОСТ 16354-70, выбираем тип и мощность одной лампы: ПВЛ1-2х40.
ВЫВОДЫ
Совершенная интеллектуальная система управления, которая предлагается в дипломной работе, сводит к минимуму возможность возникновения взрывов, пожаров и других аварий, а также влияние вредных факторов на оператора. Только при нарушении правил техники безопасности жизнь и здоровье людей могут быть под угрозой.
|