МІНІСТЕРСТВО ОСВІТИ І науки УКРАЇНИ
НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ УКРАЇНИ
"КИЇВСЬКИЙ ПОЛІТЕХНІЧНИЙ ІНСТИТУТ"
Кафедра звукотехніки та реєстрації i нформації
КУРСОВИЙ ПРОЕКТ
НА ТЕМУ "Пристрій виміру і реєстрації кутів нахилу і прискорень рухомих об’єктів"
з курсу "Проектування пристроїв реєстрації та збереження інформації"
Реферат
Курсовий проект містить основну частину на 40 аркушах, таблиць 1 , рисунків 9 , додатків 3 .
Дана курсова робота містить три основних розділи, в яких проводиться опис та проектування пристрою виміру та реєстрації кутів нахилу і прискорень рухомих об’єктів, який повинен забезпечувати можливість підключення зовнішніх карт пам’яті, зокрема Compact Flash. В роботі надано розрахунки, що підтверджують дієздатність пристрою.
Під час виконання роботи була розроблена повна функціональна схема пристрою і фрагмент принципової схеми.
Область застосування: при автоматизації різних транспортних засобів, наприклад гірських машин, автомобілів, тягачів літаків, ракет, танків і т.д.
ДАТЧИК ПРИСКОРЕНЬ, ДАТЧИК КУТІВ НАХИЛУ, FLASH-ПАМ'ЯТЬ, МІКРОКОНТРОЛЕР , АНАЛОГОВО-ЦИФРОВИЙ ПЕРЕТВОРЮВАЧ, ФІЛЬТР НИЗЬКИХ ЧАСТОТ.
ЗМІСТ
Перелік умовних позначень, символів, одиниць, скорочень та термінів
Вступ
1 Аналітичний огляд
1.1 Системи вимірювань прискорень і кутів нахилу
1.2 Датчики прискорень і кутів нахилу
1.3 Існуючі пристрої, датчики, системи
1.4 Застосування систем реєстрації та виміру кутів нахилу та прискорень рухомих об’єктів
1.5 Flash-пам’ ять
1.5.1 Зчитування з карток пам’ яті
2 Пояснення побудови та описання роботи функціональної схеми пристрою
3 Розрахунки, які підтверджують працездатність схеми
Література
Додаток А. Технічне завдання
Додаток Б. Перелік елементів до принципової схеми
ПереЛІК уМОВНИХ ПОЗНАЧЕНЬ, СИМВОЛІВ, ОДИНИЦЬ, СКОРОЧЕНь ТА ТЕРМІНІВ
CPU – Central Processor Unit (процесор);
CF – Compact Flash ;
АЦП–аналого-цифровий перетворювач;
ФНЧ
–
фільтр нижніх частот;
АК–аналоговий компаратор;
ПП–попередній підсилювач.
РКД–рідкокристалічний дисплей.
Вступ
Системи автоматизованого керування і автоматичного регулювання стали неодмінною частиною сучасного високотехнологічного виробництва. Вони все ширше використовуються в сучасних промислових та побутових приладах. Датчик фізичної величини є необхідною складовою будь-якого контуру керування, забезпечуючи сигналом зворотного зв’язку електроніку, що керує виконуючим пристроєм [3].
Тенденції розвитку систем автоматизованого керування наступні:
· збільшення точності вимірювань;
· зменшення дрейфу характеристик під дією зовнішніх змін напруги та температури;
· збільшення інтеграції пристроїв, включення в структуру систем калібрування та інтерфейсів для з’єднання зі стандартними пристроями автоматики та вимірювання;
· зменшення напруг та струмів живлення, що має першочергове значення для мобільних застосувань;
· вдосконалення технології виготовлення з метою зменшення вартості.
Інтегральні акселерометри належать до особливого класу пристроїв, що виникли у зв’язку з розвитком технологій "MEMS" (MEMS - Micro Electro Mechanical Systems) – потрібно розуміти як напівпровідникові структури, що складаються як із мініатюрних мікромеханічних елементів, так і з інтегрованих напівпровідникових мікросистем обробки даних [3, 4].
Використання акселерометрів, виготовлених за технологією MEMS, дозволяє розробляти, створювати та впроваджувати нові пристрої та системи, що будуть мати безпрецедентні технічні та економічні характеристики та будуть використовуватися в галузях науки і техніки, де використання подібних пристроїв було б неефективним, недоцільним або взагалі неможливим.
1
АНАЛІТИЧНИЙ ОГЛЯД
1.1 Системи вимірювань прискорень і кутів нахилу
Системи вимірювань прискорень і кутів нахилу включають в себе датчики лінійного прискорення і в цій якості широко використовуються для вимірювання кутів нахилу тіл, сил інерції, ударних навантажень і вібрації. Вони знаходять широке застосування на транспорті, в медицині, в промислових системах вимірювання та управління, в інерційних системах навігації. Промисловість виготовляє багато різновидів акселерометрів, що мають різні принципи дії, діапазони вимірювання прискорень, масу, габарити і ціни.
Області застосування акселерометрів визначаються їх основними параметрами, а також їх співвідношенням. Найважливішими параметрами акселерометра є діапазон вимірюваних прискорень, чутливість , що виражається зазвичай як відношення сигналу в вольтах до прискорення, нелінійність у відсотках від повної шкали, шуми, температурний дрейф нуля (зсуву) і чуттєвості. У ряді випадків суттєвої характеристикою виявляється власна частота коливань сенсора ω0 або резонансна частота f0, визначає робочу смугу частот датчика. У більшості застосувань важливі температурний діапазон і максимально допустимі перевантаження - характеристики, пов’язані до умов експлуатації датчиків. Визначальними параметрами, що впливають на точність визначення прискорення, є при дрейфі нуля і чутливості (в основному температурній), а також шуми датчика, що обмежують поріг дозволу пристрою. Чутливість датчика залежить від резонансної частоти механічної підсистеми, а також якості електронного перетворювача.
Зміна чутливості з температурою пов'язано в основному зі зміною коефіцієнта пружності. Температурний дрейф нуля обумовлений зміною коефіцієнта пружності, тепловим розширенням і технологічними похибками виготовлення сенсора. Зміна параметрів електронної частини датчика під дією температури, як правило, істотно менше.
Мініатюрні електромеханічні елементи – це мініатюрні датчики, електроприводи, мембрани, які приймають і випромінюють коливання та інші подібні елементи, що зроблені на звичайній кремнієвій підкладці з використанням процесів "мікромеханічної обробки", які являють собою комплект технологій виробництва напівпровідних структур, що дозволяють формувати в напівпровідній підкладці (кремнієвій основі) мініатюрні чітко виражені рельєфні структури достатньо великої глибини.
Мікросистеми обробки даних – це, зазвичай, функціонально орієнтовані аналогові чи змішані (аналогові і цифрові) спеціалізовані пристрої, призначені для попередньої обробки інформації та оптимального сполучення з мініатюрними електромеханічними елементами. Взагалі мікросистеми обробки даних виготовляються з використанням однієї стандартної інтегральної технології, наприклад, біполярної, CMOS чи BICMOS. Використання технологій MEMS дозволяє по-новому уявити практично всі відомі на сьогоднішній день категорії виробів мікроелектроніки [4]. Кожен виріб, що виготовлений за технологією MEMS, має спеціалізовану мікросистему обробки даних, інтегровану або з вхідним мікромеханічним датчиком, чи з вихідним мікромеханічним пристроєм. Іншими словами, використання пристроїв MEMS дозволяє створювати високоінтелектуальні вхідні датчики чи вихідні виконуючі пристрої. Такі пристрої здатні "самостійно" (тобто без участі електроніки більш високого рівня) контролювати інформацію про зміни навколишнього середовища в цілому та її механічних, теплових, біологічних, хімічних, оптичних чи магнітних складових. Отримана від вбудованих мікромеханічних датчиків інформація обробляється спеціалізованою мікросистемою обробки даних на достатньо високому розрахунковому рівні, що дозволяє прийняти необхідні рішення безпосередньо в пристрої MEMS, і, отже, можливо здійснити необхідні дії на навколишнє середовище мікромеханічними виконуючими пристроями, що інтегровані в цей же пристрій, наприклад, змінити положення вхідних датчиків, включити виконуючі мініатюрні приводи, перенести чи встановити в задану позицію інші датчики.
1.2
Датчики прискорень і кутів нахилу
Акселерометри по суті справи реагують на силу, що діє на сенсорний елемент датчика. Сила виникає або при прискоренні датчика, або є наслідком дії гравітації. Отже, акселерометри можуть застосовуватися для вимірювання сили, прискорення, вібрації, руху чи переміщення, а також положення та кута нахилу (інклінометри). Лінійка однокристальних інтегральних акселерометрів компанії Analog Devices Inc. (ADI), виконаних за технологією iМЕМS, покриває практично всі області застосування пристроїв подібного типу - від систем управління автомобільними подушками безпеки до стільникових телефонів.
Високі робочі характеристики, мале енергоспоживання, інтегрована функціональність виробництва сигналу, можливість калібрування і програмування, мініатюрність, низька ціна - все це робить акселерометри ADI надзвичайно привабливими для розробників, "закладають" ці пристрої в нові вироби. Так, відповідно до самої останньої інформації, вже 250 млн одиниць акселерометрів ADI продано до теперішнього часу на різних ринках, включаючи автомобільний, комп'ютерний, промисловий. Продукція ADI вже досить добре відома фахівцям, але, завдяки маркетингової стратегії компанії, численні лінійки датчиків та інших інтегральних пристроїв безперервно оновлюються, орієнтуючись на нові цільові ринки, тому про них завжди можна прочитати щось нове.
Області застосування акселерометрів визначаються їх основними параметрами, а також їх відношенням. Найважливішими параметрами акселерометра є діапазон вимірюваних прискорень, чутливість, що виражається зазвичай як відношення сигналу в вольтах до прискорення, шуми, температурні дрейф нуля (зсуву).
Акселерометри представляють собою датчики лінійного прискорення і в цій якості широко використовуються для вимірювання кутів нахилу тіл, сил інерції, ударних навантажень і вібрації. Вони знаходять широке застосування на транспорті, в медицині, в промислових системах вимірювання та управління, в інерційних системах навігації. Промисловість виготовляє багато різновидів акселерометрів, що мають різні принципи дії, діапазони виміру прискорень, масу, габарити і ціни.
Таблиця 1.1 – Технічні характеристики акселерометрів Analog Devices
| Модель акселерометра |
ADXL103 |
ADXL204 |
ADXL213 |
ADXL322 |
ADXL202 |
| Кількість осей |
1 |
2 |
2 |
2 |
2 |
| Діапазон вимірювань, g |
±1,7 |
±1,7 |
±1,2 |
±2 |
±2 |
| Тип вихідного сигналу |
Аналоговий |
Аналоговий |
ШІМ |
Аналоговий |
ШіМ |
| Чуттєвість |
1000 mV/g |
620 mV/g |
30 %/g |
420 mV/g |
12.5 %/g |
| Нелінійність шкали, % от FS |
0,5 – 2,5 |
0,5 – 2,5 |
0,5 |
0,2 |
0,2 |
| Поперечна чуттєвість, % |
2 – 5 |
2 – 5 |
2 |
2 |
2 |
| Температурний дрейф нуля, mg/°C |
0,1 |
0,2 |
0,25 |
0,5 |
2 |
| Температурний дрейф чуттєвості, % від величини виміру |
0,2 |
0,3 |
0,3 |
0,4 |
0,5 |
| Щільність шумів, м g/√Гц |
110 |
170 |
160 |
220 |
200 |
| Споживчий струм, мА |
0,7 |
0,5 |
0,7 |
0,5 |
0,6 |
Розглянемо можливість реалізації датчика кута нахилу, виконаного на базі двохосьового інтегрального акселерометра ADXL202, виробленого фірмою Analog Devices, а також дослідимо його характеристики.
У розглянутих датчиках застосовується інтегральний акселерометр ADXL202. Даний акселерометр дозволяє вимірювати лінійне прискорення по двох взаємно перпендикулярних осях, знаходяться в площині кристала. Таким чином, вимірюючи величину проекції сили тяжіння (прискорення вільного падіння) на осі акселерометра, можна визначити величину кута нахилу об'єкта відносно площини землі.
Вихідним сигналом акселерометра ADXL202 є імпульси, відносна тривалість яких пропорційна прискоренню (ШІМ - сигнал). Такий тип виходу забезпечує підвищену перешкодостійкість, передачу сигналу по одній лінії і прийом його будь-яким мікроконтролером, що має таймер.
Функціональна схема датчика кута нахилу, реалізованого на акселерометрі ADXL 202, показано на рисунку 1.1.
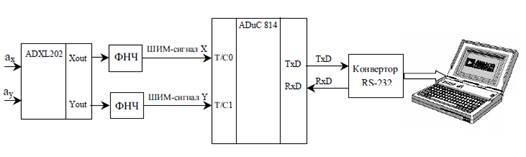
Рисунок 1.1 – Функціональна схема датчика кута нахилу ДУН-01
З виходів акселерометра Xout і Yout широтно-імпульсний сигнал, пройшовши через фільтр низьких частот (ФНЧ), надходить на дискретні входи мікроконтролера ADuC814 Т/С0 і Т/С1 (рис. 1.1). Мікроконтролер вимірює тривалість імпульсу ШІМ-сигналу, а також його період, і, з допомогою відповідних алгебраїчних та тригонометричних перетворень, визначає поточний кут нахилу акселерометра відносно площини землі. Надалі цей сигнал у форматі інтерфейсу RS-232 надходить в комп'ютер.
Шум, що міститься у вихідному сигналі акселерометра, визначає роздільну здатність пристрою, що є критичним при визначенні малих кутів нахилу. Ліміт дозвіл в основному визначається рівнем шуму вимірювання, який включає зовнішній фоновий шум і, власне, шум датчика. Рівень шуму безпосередньо пов'язаний з шириною смуги пропускання датчика. Зменшення смуги пропускання шляхом включення ФНЧ на виході датчика призводить до зниження рівня шуму. Це покращує відношення сигнал / шум і збільшує роздільну здатність, проте вносить амплітудні і фазові частотні спотворення. Двовісні датчики ADXL202 мають висновки для підключення двох зовнішніх конденсаторів, що утворюють з двома внутрішніми резисторами по 32 кОм два пасивних ФНЧ першого порядку.
Комплекс має у своєму складі дві функціональні складові – програмну та апаратну. В свою чергу, кожна з цих компонент також складається з двох частин: мікроконтролера та персонального комп’ютера (ПК). Загальна структура ПАК зображена на рис. 1.2.
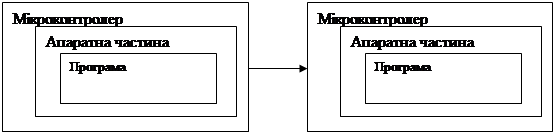
Рисунок 1.2 – Структура ПАК
Мікроконтронтролерний модуль представляє собою дві з’єднані між собою монтажні плати, на яких знаходяться (рис. 2):
· мікроконтролер AT91SAM7S256 (256KB FLASH, 64KB SRAM, 2 x USART, 1 x UART DBGU, 1 x USB device, 3 x 16-bit timers, 4 x PWM, 8ch x 10-bit ADC, SPI, TWI, 32 x i/o pins, 55 MHz, QFP 64) з вбудованими периферійними модулями (для нашої задачі використовуються аналогово-цифровий перетворювач (АЦП) та універсальний асинхронний прийомопередавач (УАПП));
· акселерометр ADXL204;
· кварцовий резонатор на частоту 18,432 МГц;
· інтерфейс RS-232 (мікросхема MAX232CPE та зовнішній роз’єм );
· гніздо живлення ПАК від зарядного блока AC-2E до мобільних телефонів NOKIA;
· зовнішній роз’єм для програмування та налагодження.
Загальний вигляд мікроконтролерного модуля наведено на рис. 1.3.
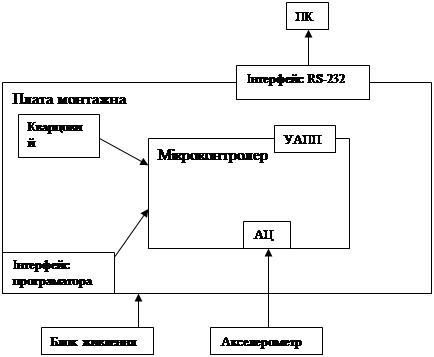
Рисунок 1.3 – Структура мікроконтролерного модуля
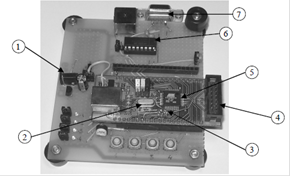
Загальний вигляд мікроконтролерного модуля
До складу даного мікроконтролерного модуля входять:
1 – гніздо живлення;
2 – кварцовий резонатор;
3 – акселерометр ADXL204;
4 – інтерфейс програматора;
5 – мікросхема мікроконтролера AT91SAM7S256;
6 – мікросхема MAX232CPE інтерфейсу RS-232;
7 – роз’єм інтерфейсу RS-232.
Як датчик прискорення вибрано оптимальний, з точки зору співвідношення ціна–якість–доступність, двоканальний акселерометр з аналоговим виходом ADXL204 фірми Analog Devices (рис. 1.4), яка є лідером з продаж акселерометрів та гіроскопів, контролюючи 40 % ринку датчиків для системи управління подушками безпеки (основний попит) та інших систем [3]. Analog Devices виготовляє одно- та двокоординатні акселерометри з діапазоном прискорень {1,5–250g}. Існують версії з комерційним (0…70 °C) та індустріальним (–40…125 °C) діапазонами робочих температур.
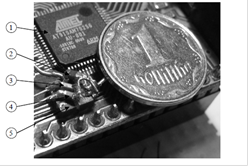
Рисунок 1.4 – Загальний вигляд експериментального монтажу акселерометра ADXL204
Відповідно до рисунку 1.4 цифри відповідають наступним даним:
1 – мікросхема мікроконтролера AT91SAM7S256;
2 – конденсатор фільтра живлення (0,1мкФ);
3 – конденсатор фільтра Cx - 500Гц (0,01мкФ);
4 – конденсатор фільтра Cy - 50Гц (0,1мкФ);
5 – акселерометр ADXL204.
Розуміючи назріваючу необхідність у недорогому та надійному датчику прискорення, виробники випустили цілу серію цих приладів, типовим представником з яких і є обраний нами акселерометр ADXL204 [6–8]. Цей датчик випускається в мініатюрному корпусі LCC, вимірює прискорення за двома взаємно перпендикулярними напрямами, вектори яких лежать паралельно площині корпусу мікросхеми, і перетворюють їх в аналоговий вихідний сигнал, пропорційний величині прискорення на осях.
У повному діапазоні величини, що вимірюється +/-1,7g, акселерометр дозволяє досягти не лінійності перетворення в 0,2 % від повної шкали і витримує без пошкоджень ударні поштовхи та віброприскорення до 1000g.
До особливостей датчика можна віднести :
· двоосьовий вимірювач прискорення в одному корпусі;
· 5х5х2 мм надмініатюрний корпус;
· роздільна здатність на 60 Гц - 2 мg;
· низьке споживання струму: < 0.6 мА;
· прямий інтерфейс с недорогими мікроконтролерами;
· налаштування ширини полоси пропускання одним конденсатором;
· однополярне живлення від 3 до 5.25 В.
1.3 Існуючі пристрої, датчики, системи
Напівпровідникові акселерометри Моторола (або датчики прискорення) містять ємнісний чутливий елемент і інтегровану на кристалі вимірювальну ланцюг, виконану за КМОП технології (рис. 1.6, рис. 1.7).
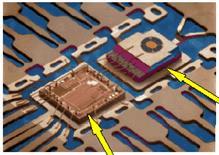
Рисунок 1.6 – Напівпровідниковий акселерометр
Ємнісний чутливий елемент G-cell є герметичним. Він являє собою механічну структуру, виконану за допомогою напівпровідникового процесу з полікремнія. Диференціальний чутливий елемент має верхню і нижню нерухомі пластини і центральну пластину, закріплену за допомогою пружних елементів. Центральна пластина має сейсмомасою і може зміщуватися під впливом прискорення. Четверта пластина у складі чутливого елемента призначена для самотестування цілісності механічної та електричної частин датчика.
Вбудована вимірювальна c хема виконана на перемикаючих конденсаторах і містить інтегратор, підсилювач, ФНЧ, пристрій температурної компенсації, тактовий генератор.
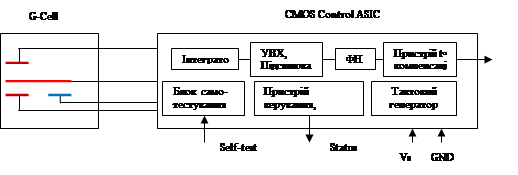
Рис унок 1.7 – Функціональна схема датчика прискорення
Коли рухома пластина займає центральне положення, вихідний сигнал дорівнює половині напруги живлення. Вимірювальна ланцюг має логометричну структуру, так що початкове зміщення і чутливість датчика лінійним чином пов'язані з живильним напругою.
Рисунок 1.8 – Чуттєвий елемент датчика
Для того, щоб скористатися функцією самотестування датчика, необхідно подати високий логічний рівень на вхід "self-test". Тоді блок тестування прикладає калібрований потенціал до тестуючої пластині. Електричне поле при цьому зміщує центральну пластину на задану величину, і на виході датчика, в разі справності, з'являється сигнал заданого рівня.
Залежно від орієнтації чутливого елемента відносно корпусу, датчики прискорення можуть в якості робочої осі мати вісь Z, вісь X або вони можуть бути чутливими по двох осях XY (рис. 1.8).
Моторола пропонує акселерометри для вимірювання прискорень від 1,5 g до 250g, з пропускною здатністю до 400 Гц, що вимагають напруги живлення 5В і що випускаються в корпусах DIP, SOIC або в корпусі з одностороннім розташуванням висновків Wingback.
Крім використання в якості вимірників власне прискорення і вібрацій, акселерометри застосовуються також для визначення абсолютного кута нахилу. Якщо датчик прискорення розташований так, що його ось чутливості перпендикулярна до поверхні землі, вихідний сигнал відповідає прискорення вільного падіння. При зміні кута нахилу, вихідний сигнал зменшується відповідно до U ~ g * cos (alpha), де alpha - кут між віссю чутливості датчика і абсолютним вертикальним положенням.
1.4
Застосування систем реєстрації та виміру кутів нахилу та прискорень рухомих об’єктів
Акселерометри можна використовувати в будь-якому пристрої, робота якого пов'язана з переміщенням, нахилом, вібрацією. Наведемо деякі типові застосування акселерометрів:
· автомобілебудування. Одне з найбільш масових програм для акселерометрів в даний час. Датчики прискорення використовуються в даному випадку в цілях безпеки - при перевищенні максимально допустимого прискорення спрацьовує система безпеки (подушки безпеки). Крім цього вони використовуються в протиугінних системах - як вимірювачі кута нахилу і вібрацій. У першому випадку використовуються датчики діапазону приблизно 35-50 g і вище, у другому - більш чутливі (1-5 g), причому чутливі і до статичної прискоренню; вимір високочастотних вібрацій також може вимагати трохи більший діапазон. Акселерометри можуть використовуватися і для короткочасної навігації при відсутності GPS-сигналу, а також для діагностики автомобіля.
· авіоніка. Датчики прискорення широко використовуються в системах управління літальними апаратами, а також в космічних системах. Вимірюються і вібрації, і квазістатичного прискорення.
· промисловість. Найширше поле для використання акселерометрів. Будь-який транспорт, підйомне обладнання, пристрої безпеки, системи стабілізації положення, тестові стенди і багато інше. Застосовуються датчики будь-якого діапазону.
· побутова техніка. Акселерометри застосовуються і можуть значно ширше застосовуватися в багатьох видах побутової техніки. Наприклад, для зменшення вібрацій (пральної машини та ін).
· системи захисту від падіння. Різка зміна прискорення спостерігається відразу після початку падіння, що дає можливість перевести систему в найбільш безпечний стан. Типовий приклад - захист жорсткого диска в ноутбуках або інших мобільних пристроях. Під час падіння відбувається парковка магнітної голівки жорсткого диска.
· медицина і спорт. Акселерометри застосовуються в системах діагностики, тренажерах, крокомір та ін.
· пристрої введення інформації. Датчики прискорення використовуються в наколінниках, пристроях вводу для комп'ютерних ігор, мобільних телефонах і т. д.
· балансування білизни в пральній машині. Відсутність балансування вмісту під час високооборотним отжиме викликає тряску пральної машини і іноді навіть переміщення її за статтю, якщо вона не закріплена. Акселерометр визначає наявність вібрації при незбалансованому обертанні. Якщо є дисбаланс, пральна машина перерозподіляє вміст, кілька разів змінюючи напрямок обертання барабана, поки не буде досягнуто баланс.
· моніторинг стану механізмів. На багатьох виробництвах зазвичай змінюють або ремонтують механічне обладнання відповідно до розкладу проведення профілактичних робіт. Це особливо характерно для виробництв, де непередбачені простої неприпустимі. Таким чином, механічне обладнання з великим невироблене ресурсом часто передчасно замінюється, що виливається в багатомільйонні втрати на багатьох підприємствах. При встановленні акселерометрів в підшипники або інші обертові механізми час експлуатації обладнання можна збільшити без додаткового ризику його раптового відмови. Акселерометри вимірюють вібрацію підшипників або інших обертових механізмів з метою оцінити їхній стан.
· автоматичне вирівнювання. Акселерометри визначають абсолютний нахил об'єкта (наприклад, будь-якого великого механізму або мобільного будинку і т.п.) Інформація про нахил використовується для автоматичного вирівнювання.
· управління прокручуванням зображення на екрані комп'ютера PDA або мобільного телефону. За допомогою акселерометра мікроконтроллер розпізнає руху руки, якими користувач керує роботою мобільних пристроїв.
· автомобільна сигналізація. Тут акселерометр розпізнає спробу підйому автомобіля за допомогою домкрата і навантаження автомобіля на вантажівку для транспортування і включає сигналізацію.
· кріплення лиж. Акселерометр реагує на силу удару і в залежності від неї визначає, чи не потрібно звільнити кріплення лиж.
· персональна навігаційна система. Тут положення визначається через прискорення (подвійна інтеграція прискорення за часом для визначення поточного положення).
· управління динаміком низькочастотного динаміка (сабвуфера). Акселерометр встановлюється на рухому частину конуса динаміка для забезпечення зворотного зв'язку по положенню, яка усуває спотворення.
· нейром'язовий стимулятор. Цей пристрій допомагає людям, що втратили контроль над м'язами ніг, ходити - за рахунок стимуляції м'язів у відповідні моменти часу. Під час ходьби передня частина стопи зазвичай піднімається при русі ноги вперед і потім опускається при ступаніі на ногу і рух ноги назад. Акселерометр прикріплюється де-небудь в нижній частині ноги або на ступні, де він дає сигнал про положення ноги. Відповідні м'язи при цьому стимулюються електричними імпульсами для того, щоб керувати підйомом ступні як потрібно.
Це класичний приклад того, яким чином акселерометр дозволяє втілити проект в реальність. Більш ранні моделі стимуляторів аналогічного призначення використовували рідинні датчики нахилу або датчик з рухомим кулькою (що діє як перемикач) для визначення положення ноги. Рідинні датчики нахилу погано працювали через плескання рідини, таким чином можна було забезпечити тільки повільну ходьбу. Датчики з рухомим кулькою легко давали збої при підйомі на гірку. З використанням акселерометра вимірюється тільки різниця в положенні ноги при русі назад і вперед, таким чином система не дає збій при підйомі на гору і не має проблем з плескання рідини. Мале енергоспоживання акселерометра дозволяє живити пристрій від невеликої літієвої батареї, роблячи загальні розміри пристрою досить невеликими.
За причини високої чутливості, компактності, низької вартості, надійності та здатності вимірювати як статичне, так і динамічне прискорення, акселерометри дають можливість здійснити багато цікавих рішення. Багато хто з цих рішень було неможливо втілити через недоліки наявних акселерометрів. Тепер же лімітуючим фактором для можливого застосування акселерометрів в багатьох випадках стає уява розробників - але багато хто розробники тепер можуть втілити свої ідеї, нездійсненні раніше. Незважаючи на те, що підвищення продуктивності акселерометрів постійно розширює поле для їх можливого застосування, корисно уникати "рішень", які порушують закони фізики .
Інтегральні акселерометри належать до датчиків механічного руху та перетворюють лінійне прискорення від руху чи гравітації в електричний сигнал.
Типові діапазони прискорень [3]:
· 1g – прискорення, що виникає при дії на об’єкт дії тяжіння, наприклад, на обладнання, що знаходиться на вашому столі;
· 0-2g – діапазон прискорення, що відчуває людина в момент руху;
· 5-20g – прискорення, що відчувають водії в момент типової аварії;
· 100-200g – прискорення, що діє на ваш портативний комп’ютер, якби ви кинули його з висоти 30см на бетонну підлогу;
· 1000g – прискорення, що буде діяти на об’єкт, якщо в нього вистрілити з артилерійської гармати.
За допомогою акселерометрів, сигнал яких обробляється програмно-апаратним комплексом (ПАК), з'являється можливість вимірювання всіх характеристик тіл, що пов'язано з їх механічним рухом, вібраційними коливаннями та положення відносно вектора гравітації:
· Кут нахилу.
Акселерометри дозволяють вимірювати значення земної гравітації ("статичне прискорення", тому за їх допомогою можна виміряти кут нахилу. Так, акселерометри використовуються в автомобільних сигналізаціях, гральних пристроях, моніторах активності пацієнта, в спортивному інвентарі.
Акселерометри Analog Devices мають великий ступінь інтеграції та вимірюють нахил у більш широкому діапазоні частот (до 200Гц), ніж більшість рідинних датчиків (до 1Гц).
· Прискорення, швидкість, відстань, сила.
Акселерометри можуть використовуватись для визначення швидкості, відстані та сили [5]. Використовуються як датчики руху транспорту, в системах навігації і контролю висоти.
· Ударні навантаження та вібрація.
Акселерометри використовуються для визначення швидкості, наприклад, від обертання частин обладнання (двигуни, верстати, приводи, дисководи) чи при землетрусі. Також вони використовуються для вимірювання справності машин і прогнозування виходу з ладу.
1.5 Flash-пам’ять
Дискові накопичувачі можуть зберігати інформацію без неперервної подачі живлення, однак, при записі й зчитуванні даних витрачають його за троє. Виходом виявилася Flash -
пам’ять, що не розряджається самовільно. Носії на її основі називаються твердотільними, оскільки не мають частин, що рухаються.
Багато виробників обчислювальної техніки бачать пам’ять майбутнього винятково твердотільною.
Модулі пам’яті Compact Flash (CF) являють собою модифікацію PC-карт. Правда, вони менші за обсягом й мають усього 50 контактів замість 68, але їх можна підключати в роз’єми PCMCIA через пасивний перехідник без додаткового ПЗ. Пристрої CF діляться на два типи, що зовні розрізняються товщиною. Розміри CF типу I – 36.4 × 42.8 × 3.3 мм, a CF типи II мають ту ж площу, але їхня товщина більше – 5 мм. Карти типу II несумісні з роз’ємами типу I, тоді як для карт типу I підходять порти обох видів.
Для роботи модулі CF використовують напругу 3,3 або 5 В і струм до 100 мА. У підсумку, за твердженням виробників, вони споживають в 20 разів менше енергії, ніж стандартні жорсткі диски, так що не потрібно часто замінювати батарейки.
Максимальна ємність карт типу I становить 256 Мбайт (у компаній PQI й Delkin), а карт типу II – 512 Мбайт (у фірми SiliconTech). Пам’ять типу I дорожче, ніж типу II, тому що в неї те ж число мікросхем треба вміщати в менший обсяг.
1.5.1 Зчитування з карток пам’яті
Для швидкого й зручного обміну інформацією між флеш-картами й комп’ютером використаються зчитувачі. Вони розрізняються способом й інтерфейсом підключення до ПК, а також швидкісними характеристиками.
Зовнішні зчитувачі – ці пристрої можуть підключатися через USB, LPT, і FireWire (IEEE1394) інтерфейси. Вони відрізняються один від одного тільки швидкісними показниками. Швидкість самого повільного з них – підключеного через паралельний порт, може досягати 0.34 Мбайт/с – при записі, і 0.62 Мбайт/с – при зчитуванні даних. У моделей з універсальним послідовним портом ці показники становлять 0.46 й 0.77 Мбайт/с;
Внутрішні зчитувачі – подібні пристрої вставляються в 3,5-дюймовий відсік системного блоку, і підключаються до ATA інтерфейсу. До переваг зчитувачів даного класу належить висока швидкість (0.52 Мбайт/с й 1 Мбайт/с) і відсутність сторонніх пристроїв на столі. А до недоліків – те, що він займає відсік системного блоку, і IDE канал;
Зчитувачі-перехідники – цей клас пристроїв дозволяє підключити Flash-карту до комп’ютера через дисковід. При цьому використається перехідник зовні схожий на 3.5-дюймову дискету (або PC-карту для ноутбуків). Карта пам’яті вставляється в адаптер, що згодом розміщується в дисководі. Використання PCMCIA-адаптерів дає непогані результати, швидкість передачі досягає 1Мбайт/с.
За методом зчитування інформації карти діляться на наступні:
· контактні;
· безконтактні;
· зі здвоєним інтерфейсом.
Контактні карти взаємодіють зі зчитувачем, стикаючись металевою контактною площадкою карти з контактами зчитувача. Даний метод зчитування просто реалізується, але підвищує зношування карти при частому використанні. Контактна смарт-карта складається з трьох частин, перша з яких є контактна область, ч i п (мікропроцесор карти), пластикова основа.
Безконтактні карти мають вбудовану котушку індуктивності, що в електромагнітному полі зчитувача забезпечує живленням мікросхему, що видає інформаційні радіосигнали. Такий метод зчитування дозволяє часто використовувати карту без зношування самої карти й зчитувача.
Карти зі здвоєним інтерфейсом мають одночасно й контактну площадку й вбудовану котушку індуктивності. Такі карти дозволяють здійснювати роботу з різними типами зчитувачів.
Для смарт-карт існує кілька міжнародних стандартів, що визначають практично всі властивості карт, починаючи від розмірів, властивостей і типів пластику, і завершуючи змістом інформації на картці, протоколів роботи й форматів даних.
2
.
ОБГРУНТУВАННЯ способу побудови ФУНКЦІОНАЛЬНОЇ
СХЕМИ ПРИСТРОЮ
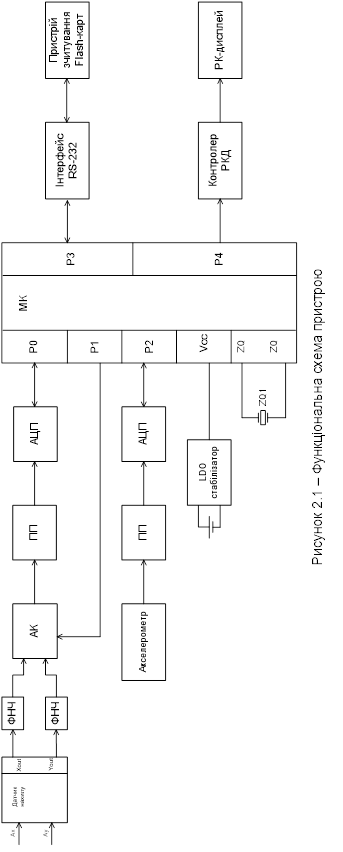
Функціональна схема пристрою реєстрації прискорень та кутів нахилу рухомих об’єктів наведена на рис. 2.1.
В основі даного пристрою лежать два датчика, один з яких є акселерометром і фіксує прискорення, інший є датчиком кутів нахилу, за допомогою якого визначається поточний кут нахилу відносно площини землі, а також мікроконтролер на базі мікропроцесора, що виконує функції керування пристроєм. Також до складу входять аналоговий компаратор, попередній підсилювач, фільтр низьких частот та АЦП, тому мікроконтролер також виконує функції оцифровування аналогового сигналу.
З виходів датчика кутів нахилу Xout і Yout широтно-імпульсний сигнал, пройшовши через фільтр низьких частот (ФНЧ), надходить на дискретні входи мікроконтролера . Мікроконтролер вимірює тривалість імпульсу ШІМ-сигналу, а також його період, і, з допомогою відповідних алгебраїчних та тригонометричних перетворень, визначає поточний кут нахилу акселерометра відносно площини землі. Якщо датчик прискорення розташований так, що його вісь чутливості перпендикулярна до поверхні землі, вихідний сигнал відповідає прискоренню вільного падіння. При зміні кута нахилу, вихідний сигнал зменшується відповідно до U ~ g * cos (alpha), де alpha - кут між віссю чутливості датчика і абсолютним вертикальним положенням. Надалі цей сигнал у форматі інтерфейсу RS-232 надходить в комп'ютер.
Стандартний інтегральний датчик прискорень являє собою ємнісну мікромеханічну поверхневу структуру з КМОП-схемою обробки сигналу з ASIC-функціями, які включають в себе підсилюючу і обробляючу електроніку, фільтр низьких частот, схему температурної компенсації з аналоговим виходом. Дана структура зроблена з полі кремнію, в якій рухома підкладка, закріплена в декількох точках на підкладці, здатна переміщуватись під дією прискорення між
неру
хомими верхнім та нижнім електродами. Функціонуючи на основі методів переключаючого конденсатора, датчик видає сигнал прискорення, використовуючи фільтрацію. Нульове зміщення, чуттєвість і налаштування фільтру задаються при виробництві, а в надалі для роботи пристрою необхідно тільки декілька зовнішніх пасивних компонентів. Акселерометр детектує статичне прискорення, даючи на виході датчика середньоквадратичну напругу (половину напруги живлення).
Сигнал з виходів обох датчиків йде на відповідні АЦП, з виходу яких він поступає на вхід мікроконтролер. Мікроконтролер здійснює перерахунок кодів, що відповідають вихідній напрузі датчиків у швидкість та кут нахилу. За допомогою інтерфейсу інформація відображається на рідкокристалічному моніторі та інтерфейсі USB.
Живлення елементів схеми здійснюється від акумулятора напругою 4,5В за допомогою DC – DC перетворювача. В якості зарядного пристрою використовується готовий не стабілізований мережевий адаптер БНП 12-03 з вихідною напругою 12 вольт і струмом навантаження 300 мА.
3
.
РОЗРАХУНКИ, ЩО ПІДТВЕРДЖУЮТЬ ДІЄЗДАТНІСТЬ
ПРИСТРОЮ
3.1 Розрахунок ФНЧ
У пристрої ФНЧ виконує функцію фільтрації перешкод. Оскільки в якості датчика вимірювання кутів нахилу використовується датчик фірми Analig Devices ADXL 202, час відгуку якого складає 75 мс, то частота зрізу ФНЧ буде
В якості апроксимуючої передавальної функції приймемо апроксимацію Чебишева. Тоді порядок фільтра визначається

де  – гарант оване затухан ня , =40 дБ; – гарант оване затухан ня , =40 дБ;
 – нер і вном і рн і сть АЧХ фильтр у в полос і пропускан н я, – нер і вном і рн і сть АЧХ фильтр у в полос і пропускан н я,  =1 дБ. =1 дБ.
Округляємо отриманий при розрахунку порядок фільтра в бік найближчого більшого цілого числа. По таблиці полюсів равноволновой функції, апроксимуючої частотну характеристику знаходимо координати полюсів, для значення нерівномірності ачх в смузі пропускання 1 дБ

Визначаємо нормовані власні частоти полюсів і їх добротності

Здійснюємо перехід до фізично реалізованого фільтру

Виходячи зі значення добротності та порядку фільтра, розраховуємо активну ланку з Т-мостом наведену на рис. 3.1.
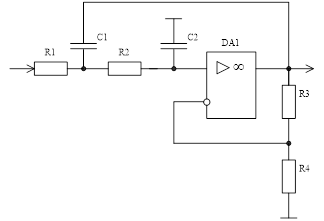
Рисунок 3.1 – ФНЧ друг ого порядк у
Нехай С19 = С20 = 3300 пф і R4 = R5 тоді


Значення опорів R 4 і R 5 округляємо до найближчого значення із ряду Е24 рівне 3 кОм.
Приймемо R 6 рівним 10кОм, тоді значення R4 визначається
Значення опору R 7 округляємо до найближчого значення із ряду Е24 рівне 10 кОм.
ЛІТЕРАТУРА
1. ДСТУ 3008-95. Документація. Звіти у сфері науки і техніки. Структура і правила оформлення. – К.: Видавництво стандартів, 1995.– 37с.
2. ГОСТ 19.701-90. Единая система программной документации. Схемы алгоритмов, программ, данных и систем. Условные обозначения и правила выполнения. – М..: Изд-во стандартов, 1991.-25с
3. Weinberg H.
Dual Axis, Low g, Ffully Integrated Accelerometers. Analog Dialogue. 1999. Vol. 33. P. 23–26.
4. Лапин А.А. Интерфейсы. Выбор и реализация. М.: Техносфера, 2005. – 168 с.
5. Сигма-дельта АЦП фирмы Analog Devices // Электронные компоненты и системы. – Киев: VD MAIS. – Май 1996. – C. 20–25.
ДОДАТКИ
Додаток А
ТЕХНІЧНЕ ЗАВДАННЯ
на курсовий проект
"Пристрій виміру та реєстрації кутів нахилу та прискорень рухомих об’єктів"
1 Назва роботи
Пристрій виміру та реєстрації кутів нахилу та прискорень рухомих об’єктів.
2 Основа для виконання
Робота проводиться на основі завдання на курсовий проект у відповідності з варіантом 34.
3 Ціль та актуальність роботи
Ціллю роботи являється розробка пристрою для виміру та реєстрації кутів нахилу та прискорень рухомих об’єктів, функціональної і принципової схеми, розрахунок його основних вузлів, оволодіння методикою проектування електронної апаратури і правилами оформлення технічної документації на проектувальний пристрій.
4 Основні технічні характеристики пристрою виміру та реєстрації кутів нахилу та прискорень рухомих об’єктів
4.2.1 Діапазон кутів 0…90°.
4.2.2 Діапазон прискорень – 0…350 км/год.
4.2.3 Похибка вимірювань – 1 %.
4.2.4 Джерело живлення – 4,5 В.
4.2.5 Зарядний пристрій – 12 В, 300 мА.
4.2.6 Тип індикатора –
рідкокристалічний .
5 Вимоги до технологічності
Пристрій повинен бути виконаний на елементній базі широкого застосування і вміщувати мінімум спеціалізованих елементів.
6 Вимоги до безпеки
По відношенню до безпеки працюючий пристрій повинен відповідати вимогам ГОСТ 12.2.006 і забезпечувати електробезпеку, пожежну безпеку, механічну міцність та інші вимоги при монтажі, експлуатації, обслуговуванні та ремонті.
7 Економічні показники
Розроблений пристрій повинен бути ефективний у відношенні його виробництва з економічної точки зору. Схемні рішення повинні мати мінімальну вартість реалізації.
8 Вимоги до рівня уніфікації
У розробленій конструкції необхідно прямувати до максимального використання стандартних компонентів та уніфікації виробів, а також запозичених збіркових одиниць та деталей.
Додаток Б
Пристрій виміру та реєстрації кутів нахилу та прискорень рухомих об’єктів
Перелік елементів
| Зона |
Позначення |
Назва |
Кіл. |
Примітки |
| Конденсатори К10-17 ОЖ0.460.107ТУ |
| Конденсатори К50-35 ОЖ0.464.214ТУ |
| C1, C2 |
К10-17-П33- 3,3 н Ф ± 10%-25-В |
2 |
| С3 …C6 |
К10-17-П33- 220 н Ф ± 10%-25-В |
1 |
| С 7 |
К10-17-П33- 10 н Ф ± 10%-25-В |
1 |
| С 8 |
К10-17-П33- 220 н Ф ± 10%-25-В |
1 |
| С 9 |
К10-17-П33- 100 н Ф ± 10%-25-В |
1 |
| С 10…C13 |
К10-17-П33- 10 н Ф ± 10%-25-В |
1 |
| С 14 |
К 5 0- 35-16 В- 220 мкФ-И-В-А |
1 |
| С 15, C16 |
К10-17-П33- 220 н Ф ± 10%-25-В |
1 |
| С1 7 |
К10-17-П33- 47 мкФ ± 10%-25-В |
2 |
| С18 |
К10-17-П33- 0,1 мкФ ± 10%-25-В |
6 |
| С19 |
К10-17-П33- 10 мк Ф ± 10%-25-В |
2 |
| Мікросхеми |
| DA1 |
MMA2260D |
1 |
| DA2, DA5 |
OP262 |
2 |
| DA3 |
RSO-0505S |
1 |
| DA4 |
ADXL202 |
1 |
| DA6 |
LM393 |
1 |
| DD1 |
С8051F 340 |
1 |
| I ндикатори |
| H1 |
TM81ABSW-1 |
1 |
| Резистори С2-23 ОЖ0.467.104ТУ |
| R1 |
C2-23-0.5-10 к Ом ± 5%-А-В-В |
1 |
| R2 |
C2-23-0.5- 1 к Ом ± 5%-А-В-В |
1 |
| R3 |
C2-23-0.5- 1,8 к Ом±5%-А-В-В |
1 |
| R 4 |
C2-23-0.5- 1,5 к Ом±5%-А-В-В |
1 |
| R 5, R 9 |
C2-23-0.5- 3 к Ом±5%-А-В-В |
1 |
| R 6 , R10 |
C2-23-0.5- 47 к Ом±5%-А-В-В |
1 |
| R 7 , R11 |
C2-23-0.5- 3 к Ом±5%-А-В-В |
1 |
| R 8 , R12 |
C2-23-0.5- 56 к Ом±5%-А-В-В |
1 |
| Резонатор и |
| Q1 |
KXO-85 12МГц |
1 |
|