Анализ устройств для контроля и регулирования величины зазора в зубчатой механической передаче
Е.С. Долгих, М.В. Корняков
Национальный исследовательский Иркутский государственный технический университет
В зависимости от числа передач существуют одноступенчатые и многоступенчатые типы редукторов. У многоступенчатых редукторов степень влияния люфта на надежность работы зубчатой передачи будет больше, чем у одноступенчатых. Одноступенчатые редукторы имеют всего одну пару взаимодействующих колес, люфт между которыми незначителен. У многоступенчатых редукторов, по мере увеличения числа передач, суммарный люфт становиться больше за счет увеличения количества взаимодействующих зубчатых пар. Кроме того, что многоступенчатые редукторы обладают большей величиной люфта, они ещё имеют больший момент нагрузки на выходном валу. Это объясняется тем, что увеличением числа ступеней преследуется цель повышения крутящего момента на выходном валу, а высокий крутящий момент необходим для преодоления большого момента нагрузки. Таким образом, наличие у многоступенчатых редукторов большего влияния перечисленных факторов делает их менее надежными.
Повысить надежность и продлить срок службы механических передач можно компенсируя люфт при помощи механических и электромеханических способов. Несложным способом компенсации зазора является введение в кинематическую схему упругого звена, так называемой, упругой муфты. Муфта соединяет вал двигателя с входным валом редуктора. В режимах пуска и торможения, когда после перехода через зазор происходит удар зубьев, наличие муфты позволяет осуществить плавное повышение нагрузки. Несмотря на достоинства данного способа, у него имеется существенный недостаток. Наличие упругой муфты повышает суммарный момент инерции механической системы, что приводит к дополнительным потерям электроэнергии и ухудшению управляемости двигателем, то есть пуск, реверс и торможение будут протекать дольше.
Наиболее эффективным с точки зрения обеспечения регулирования и поддержания минимальных динамических нагрузок в зубчатых передачах является применение электромеханических способов компенсации зазора. Основной проблемой для реализации данных способов является организация системы контроля величины и напряжений в элементах зубчатой передачи для построения автоматической системы регулирования и поддержания минимальных динамических нагрузок.
Известен способ [1] компенсации зазора в механической передаче однодвигательного привода при помощи системы управления с датчиком зазора. Способ реализует устройство для управления пуском редукторного электропривода. Устройство позволяет осуществить пуск двигателя с минимальным крутящим моментом при наличии зазора. Датчик зазора в этом устройстве определяет момент времени, когда зазор пройден, и по этим данным дает сигнал системе управления для повышения крутящего момента двигателя. Одним из возможных мест установки такого датчика является подшипниковый узел выходного вала редуктора, на который при наличии косозубых шестерен возникает давление перпендикулярно направленное оси вала(на рисунке изображена кинематическая схема редуктора с косозубыми шестернями). До зацепления зубьев величина давления на подшипниковый узел равна нулю, а после зацепления происходит её увеличение. Величина этого давления пропорциональна моменту на выходном валу. В качестве датчика зазора применяется упругий механический элемент, на котором закреплён тензометрический датчик, а роль упругого элемента выполняет плоская пружина.
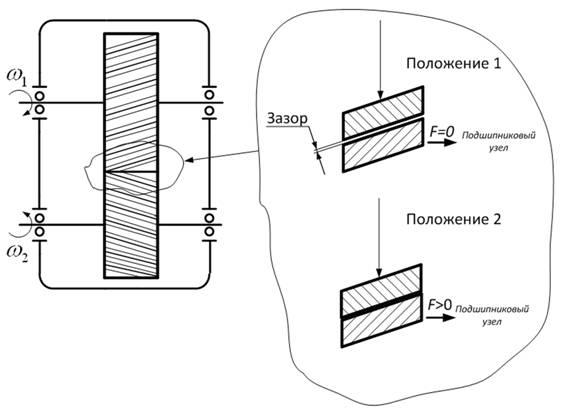
Кинематическая схема редуктора с косозубыми шестернями
При наличии зазора величина давления на подшипниковый узел будет равна нулю и сигнал с датчика будет нулевым. После того, как все шестерни редуктора перейдут зазор, на выходном валу появится крутящий момент, это приведет к повышению давления на подшипниковый узел, датчик начнёт передавать сигнал в систему управления для большего повышения крутящего момента двигателя. Данный способ позволяет осуществить процесс запуска без удара и оптимально уменьшить время пуска.
Описанное устройство решает проблему компенсации зазора только частично, так как при торможении и реверсе зазор не компенсируется. Известно устройство [2] для управления электроприводом, позволяющее осуществить плавный выбор зазора при пуске, реверсе и торможении. При разгонах и торможениях формирование сигналов управления электродвигателем происходит совместно по двум управляющим каналам. По первому каналу регулируется главный сигнал задания, а по второму – величина коэффициента усиления. Главный сигнал задания формируется из суммы сигналов задания скорости, величина которого регулируется командоконтроллером, и сигнала отрицательной обратной связи по напряжению, а величина коэффициента усиления изменяется пропорционально разности этих значений. При пуске коэффициент усиления увеличивается до порогового значения, после чего его значение остается постоянным и управление скоростью электродвигателя происходит только по первому каналу. При торможении за счёт уменьшения не только сигнала задания скорости, но и напряжения отрицательной обратной связи по напряжению, интенсивность уменьшения коэффициента усиления протекает быстрее, чем его увеличение при пуске, поэтому торможение двигателя происходит при низком тормозном моменте. Для того, чтобы дальнейший процесс торможения проходил более эффективно, управление коэффициентом усиления осуществляется от источника постоянного сигнала, который включается при установке командоконтроллера в нулевое положение. Такой способ регулирования позволяет снизить тормозные и пусковые моменты двигателя, тем самым ограничить ударную нагрузку после перехода через зазор.
Кроме того, имеются способы компенсации зазора, осуществляемые применением двухдвигательного электропривода. Эти способы основаны на управлении движением общей массы (рабочий орган) по принципу электромеханического распора. Его применение возможно только для двухдвигательного привода, так как электромеханический распор осуществим при работе с разными моментами двух приводных двигателей, работающих на один зубчатый венец или зубчатую рейку. То есть, один из двигателей работает в двигательном, а другой – в тормозном режимах. В момент изменения направления общего рабочего органа, функции двигателей меняются, благодаря чему движение происходит без перехода через люфт.
Постоянный электромеханический распор исключает возникновение люфта, но работа одного из двигателей в тормозном режиме вызывает дополнительные потери электроэнергии и увеличивает нагрузки, приводящие к большему износу [3]. Поэтому система управления должна обеспечивать распор только тогда, когда повышается вероятность перехода через зазор, а именно – при режимах пуска реверса и торможения.
Это учитывается в способе [3], где формирование распора происходит при условии, если момент нагрузки на валу ведущего двигателя меньше суммарного момента трения, приведенного к нему. Если же это значение момента нагрузки превысит значение момента трения, то второй тормозной двигатель пройдет через зазор и примет на себя часть нагрузки.
Также имеется способ, обеспечивающий распор при значении момента нагрузки меньше половины максимального. Однако и здесь имеются свои недостатки. При выходе значений скорости и нагрузочного момента общей массы за пределы установленного диапазона, происходит раскрытие зазоров передач, возникают колебательные процессы в электрической и механической частях электропривода, что приводит к повышенному износу, снижению надежности системы и ухудшению качества управления движением рабочего органа. При наличии упругих звеньев в кинематических передачах, ухудшение показателей качества и надежности становится более значительным.
Устранение проблем, перечисленных выше, осложняется тем, что параметры двигателей могут различаться. Хотя они могут иметь одинаковые каталожные данные, но при их производстве может иметь место, так называемый, технологический разброс параметров. Из-за этого возможно возникновение неравномерного распределения нагрузки между двумя двигателями.
Эти особенности учитывает следующий способ [4], основанный на разделении управляющих воздействий на основные и дополнительные. На каждый привод по координатам полного вектора его состояния и интегральной составляющей момента упругости кинематической передачи формируются дополнительные управляющие воздействия, а основные управляющие воздействия формируются в зависимости от суммы моментов упругости кинематических передач и от координат общей массы. То, что формирование дополнительных управляющих воздействий осуществляется на каждый привод по отдельности, позволяет скомпенсировать разброс параметров двигателей. Кроме того, темп дополнительных управляющих воздействий устанавливается выше темпа основных.
В данной системе удается компенсировать различия электромеханических параметров первого и второго электроприводов. При разных величинах зазора в редукторах и моментах инерции обеспечивается точность регулирования приводов и компенсация зазора.
Недостатком этого варианта является высокая стоимость его технической реализации.
На основании проведенного анализа достоинств и недостатков способов компенсации зазора, можно сделать следующий вывод, что современные системы управления электроприводом должны:
- обладать устройством, точно определяющим наличие зазора;
- компенсировать зазор, оптимально не снижая эффективность работы электропривода;
- учитывать возможные отклонения паспортных данных двигателей и различия упругостей механических передач (для двухдвигательного привода);
- иметь недорогую техническую реализацию.
Список литературы
Пат. № 2314633, Российская Федерация, МПК, H02P1/20, B60L15/04. Устройство для управления редукторного электропривода/ Д.В. Волков, Ю.П. Сташинов; заявитель и патентообладатель Южно-Российский Государственный техн. ун-т. № 2006119251/09; заявл 01.06.2006; опубл 10.01.2008.
А.с. № 1461839, СССР, МПК 4, E02F9/20. Устройство для управления электродвигателем механизма поворота карьерного экскаватора/ Р.С. Кишко, В.И. Мороз, Б.Г. Бойчук, Л.И. Кунин., Б.В. Ольховиков, В.В. Березин заявитель и патентообладатель Львовский политехнический институт им. Ленинского комсомола. № 4095483; заявл. 15.07.1986; опубл. 28.02.1989.
А.с. № 1577054, СССР, МПК5, H02P5/46, H02P7/68. Устройство для управления двухдвигательным электроприводом/ В.В. Новиков, Б.В. Панкратов, В.К. Ширяев; заявитель и патентообладатель Предприятие п/я Р-6896. № 4412770; заявл. 18.04.1988; опубл. 07.07.1990.
Пат. № 2316886, Российская Федерация, МПК, H02P5/46, H02P5/69. Способ управления взаимосвязанными приводами (Варианты)/ С.В. Тарарыкин, В.А. Иванков, В.В. Тютиков, Е.В. Красильникъянц; заявитель и патентообладатель Ивановский государственный энергетический университет имени В.И. Ленина. № 2006114515/09; заявл. 27.04.2006; опубл. 10.02.2008.
|