Обнинский политехникум.
Курсовой проект по предмету:
«Автоматическое управление».
Тема проекта:
«Типы регулярных регуляторов».
Учащийся Карпухин Роман Александрович.
Гр. ПО-21, IV курс.
Консультант Рыдкий Анатолий Владимирович.
Г. Обнинск, 2001 г.
Содержание.
Введение
1. Основные понятия и определения.
2. Теоретичиская часть
2.1. Интегральное звено
2.2. Дифференцирующее звено
2.3. Реальное интегральное звено
2.4. Реальное дифференцирующее звено
3. Основная теоретическая часть
3.1. Типы регулярных регуляторов
3.2. Пропорциональные регуляторы
3.3. Интегральные регуляторы
3.4. Дефференцальные регулирующие устройства
4. Практическая часть
4.1. Тестовая программа
Вывод
Список литературы
Введение.
В успешном решении экономических и социальных вопросов одним из решающих факторов является автоматизация и механизация производства.
В настоящее время технический прогресс характеризуется непрерывным ростом автоматизации производства во всех отраслях народного хозяйства. От автоматизации отдельных установок и агрегатов в настоящее время переходят к комплексной автоматизации и созданию автоматических цехов и заводов- автоматов, обеспечивающих максимальное повышение производительности труда, снижение себестоимости продукции и повышение культуры производства. Только благодаря автоматизации стало возможным осуществление ряда наиболее прогрессивных технологических прогрессов, создание новых современных видов сообщений и средств связи.
Для решения этих задач необходимо повышать технический уровень вычислительной техники, приборов и средств автоматизации на основе новейших достижений микроэлектроники, оптоэлектроники и лазерной техники; опережающими темпами развивать производство быстродействующих вычислительных комплексов, периферийного оборудования и программных средств к ним, электронных устройств регулирования и телемеханики, исполнительных механизмов, приборов и датчиков систем комплексной автоматизации сложных технологических процессов, агрегатов, машин и оборудования, а также микропроцессорной техники.
Для выполнения этих решений, разработки и эффективной эксплуатации автоматических систем регулирования необходимо знать общие законы их построения и действия, методы исследования и настройки. Эти вопросы изучает наука об автоматических системах управления, в частности один из её разделов – автоматические системы регулирования.
Простейшие автоматические регуляторы и устройства человек стал применять ещё в древнейшие времена. Так на рубеже нашей эры арабы с успехом применяли поплавковые регуляторы уровня для повышения точности показаний водяных часов. В средние века с успехом применялись центробежные регуляторы хода водяных мукомольных мельниц. В 1657 г. Гюйгенс
предложил и встроил в механические часы маятниковый регулятор хода.
Однако развитие промышленных автоматических регуляторов началось лишь на рубеже XVIII и XIX столетий – в эпоху промышленного переворота в Европе.
Опыт применения регуляторов показал, что эффективность их работы нельзя рассматривать в отрыве от статических и динамических свойств объекта регулирования.
Автоматические системы регулирования.
Основные определения и понятия.
Работа любой технологической установки, агрегата или технологического объекта характеризуется различными физическими величинами, например температурой, давлением, разрежением, расходом вещества и т.п. Для обеспечения оптимального режима их работы эти физические величины должны с определённой точностью поддерживаться на заданном уровне или изменяться по определённому закону.
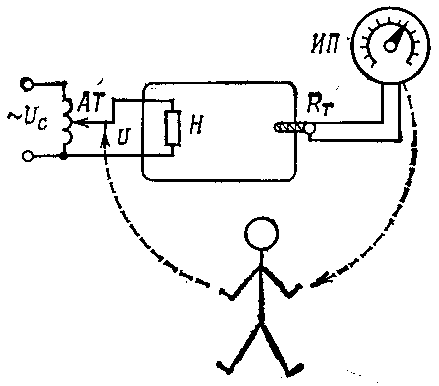
Рисунок 1. Система ручного регулирования температуры.
На рис.1 представлен технологический объект – сушительный шкаф, в котором должна поддерживаться постоянная температура Q, которая измеряется измерительным прибором ИП
в комплекте с термометром сопротивления Rт. Сушительный шкаф имеет электрический нагревательный элемент Н
, питающийся от автотрансформатора АТ.
При отклонении температуры от заданного значения, например при увеличении (падении) напряжения и
с в питающей сети, человек – оператор перемещает движок автотрансформатора в направлении изменения напряжения U
, соответствующем восстановлению заданного значения температуры. Так осуществляется ручное регулирование объектом температуры сушительного шкафа. Принципиальная схема взаимодействия системы «объект- оператор»при ручном регулировании температуры сушительного шкафа представлена на рис.2. Входом
системы по регулирующему каналу является воздействие человека-оператора Ч-О
на движок автотрансформатора АТ. Выходом
системы является значение Qтемпературы в сушительном шкафу.
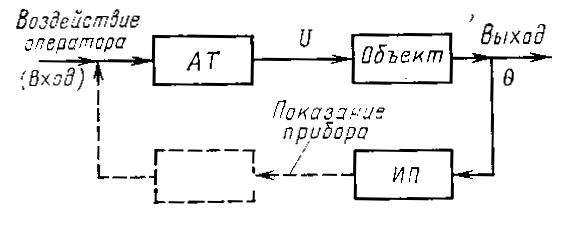
Рисунок 2. Структурная схема системы, представленной на рис. 1.
На рис.2 видно, что выход системы ручного регулирования по воздействию связан с её входом через оператора (пунктир рис.1 и 2).Из этого следует общая идея перехода от ручного к автоматического регулированию – подать регулирующее воздействие с выхода системы на её вход через определённое техническое устройство, без человека-оператора Ч-О.

Рисунок 3. Схема автоматической системы регулирования (АСР).
На рис. 3 показан переход от ручного регулирования температуры сушительного шкафа (рис.1) к автоматического её регулированию. Температура в сушительном шкафу (рис.3) измеряется термометром сопротивления R
т, включённым в одном из плеч измерительного моста ИМ. При заданном значении температуры измерительный мост уравновешен, на вход электронного усилителя ЭУ напряжение не подаётся. При отклонении температуры от заданного значения соответственно изменяется сопротивление R
т, что вызывает разбаланс измерительного моста ИМ. На электронный усилитель подаётся напряжение разбаланса, и электродвигатель М начинает вращаться, перемещая движок автотрансформатора АТ в сторону ликвидации отклонения температуры шкафа от заданного значения. При достижении заданного значения температуры измерительный мост ИМ балансируется, электродвигатель М останавливается и система приходит в равновесное состояние.
Заданное значение температуры устанавливается путём перемещения оператором движка потециометра R
з.
Потециометр R
служит для коррекции равновесия ИМ при значении температуры в сушильном шкафу, равном заданному.
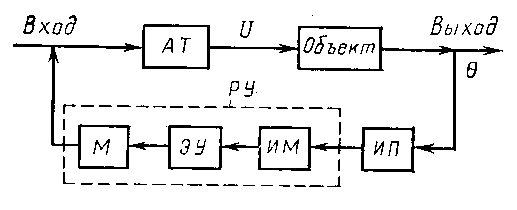
Рисунок 4. Структурная схема АСР.
На рис.4 в общем виде изображена функциональная структурная схема автоматической системы регулирования (АСР) по рис.3. Сравнивая схемы (рис. 2 и 4), видим, что в автоматической системе регулирования температуры в сушильном шкафу функции управления вместо человека-оператора осуществляет регулирующее устройство РУ, состоящее из измерительного моста ИМ, электронного усилителя ЭУ и электродвигателя М.
Комплекс технических средств (устройств), присоединяемых к регулируемому объекту и обеспечивающих автоматическое поддержание заданного значения его регулируемой величины или автоматическое изменение её по заданному закону, называют автоматическим регулятором.
Выход объекта регулирования (регулируемая величина) воздействует на вход регулятора; выход регулятора воздействует на вход объекта регулирования.
В общем случае совокупность управляемого объекта и автоматического управляющего устройства, определённым образом воздействующих между собой, называют автоматической системой. Автоматическая система с замкнутой цепью воздействия, в которой управляющее (регулирующее) воздействие вырабатывается в результате истинного значения управляемой (регулируемой) величины с заданным (предписанным) её значением, называется автоматической системой регулирования (АСР).
Процесс, посредством которого одну или несколько регулируемых величин приводят в соответствие с их постоянными или изменяющимися по определённому закону заданными значениями, достигаемое техническими средствами путём выработки воздействия на эти величины в результате сравнения их действительных значений с заданными, называется автоматическим регулированием.
Автоматическое регулирование является частным случаем более общего понятия автоматического управления.
Автоматическим управлением называется процесс, при котором операции выполняются посредством системы, функционирующей без вмешательства человека в соответствии с заранее заданным алгоритмом.
Под алгоритмом в общем случае понимается совокупность действий, Выполнение которых в определённой последовательности приводит к решению поставленной задачи. Алгоритм управления – алгоритм, определяющий процесс управления некоторым объектом.
Из рис.3 и 4 следует, что автоматическая система регулирования состоит из ряда элементов, выполняющих различные функции. (Основные элементы, из которых формируется автоматическая система регулирования, рассмотрены ниже.)
Интегрирующее звено.Выходная величина интегрирующего звена пропорциональна интегралу входной величины, т. е.
 (1) (1)
Дифференциальное уравнение интегрирующего звена имеет вид
dx
ВЫХ
/ dt
=
kx
ВХ
(2)
Коэффициент k
называют коэффициентом усиления (коэффициентом передачи) звена по скорости.
Он численно равен скорости изменения выходной величины при единичном значении входной величины. Преобразовав дифференциальное уравнение звена по Лапласу, получим px
ВЫХ
(
p
) =
kx
ВХ
(
p
)
, откуда находим передаточную функцию звена:
W (p) = k / p*
(3)
Если входная и выходная величины имеют одинаковую размерность, то из выраженияdx
ВЫХ
/ dt
=
kx
ВХ
следует, что коэффициент k
имеет размерность c-1
. В этом случае дифференциальное уравнение dx
ВЫХ
/ dt
=
kx
ВХ
удобнее представить в виде
dx
ВЫХ
/ dt
=
x
ВХ
/ Т, (4)
где Т=1/
k
При этом передаточная функция звена примет вид
W (p) = 1 / Tp (5)
Величину Т
называют постоянной времени интегрирующего звена.
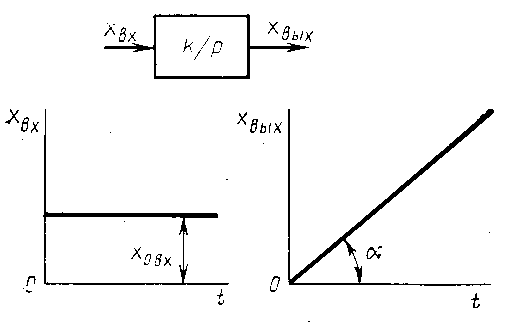
Рисунок 5. Передаточная функция и временная характеристика интегрирующего звена.
На рис.5 Представлен характер изменения выходной величины интегрирующего звена при подаче на его вход постоянной входной величины x
0ВХ
, изображение которой x
ВХ
(
p
)=
x
0ВХ
/ р
Тогда из уравнения W
(
p
)= 1 /
Tp
получим
x
0ВХ
=
L
-1
[
x
ВЫХ
(
p
)] =
L
-1
[
k
x
0ВХ
/
p
2
] =
k
x
0ВХ
*
t
(6)
Таким образом, в этом случае x
вых изменяется по прямой, проходящей через начало координат под углом a
=arktkx
вх оси абсцисс.
Из передаточной функции W
(
p
)= 1/
Tp
звена W
(
p
)=
k
/
p
определяем
W (i w) = k / j w = - j k / w; U (w) = 0;
V (w) = - k / w; W (w) = k / w;
j
(w) = -
p
/ 2
(7)
Согласно формуле
W
(
i
w
) =
k
e
–
j
p
/ 2
/
w
.
(8)
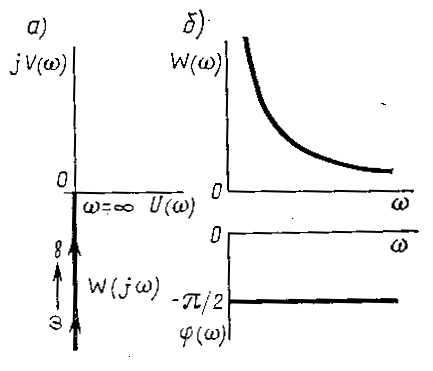
Рисунок 6. Частотные характеристики интегрирующего звена.
Частотные характеристики представлены на рис. 6, из которого следует, что а) КЧХ звенаW
(
jw
)
при изменение w
от 0 до ¥ совпадает с отрицательной мнимой полуосью (рис.6а);
б) при всех частотах выходные колебания отстают по фазе от входных на угол 90° (рис.6в)
в) АЧХ представляет собой гиперболу, т.е. чем меньше частота входного сигнала, тем больше этот сигнал усиливается звеном. При w
= 0
коэффициент усиления равен бесконечности, и, наоборот, при w
=
¥ коэффициент усиления звена равен нулю (рис.6б).
Логарифмируя W
(
w
)
в (7), получаем
L (w) = 20 lg k – 20 lg w (9)
Таким образом, ЛАЧХ представляет собой прямую линию, пересекающую при k
= 0
ось абсцисс в точке w
= 1
и имеющую наклон к оси абсцисс 20 дБ / дек. При k¹ 1 ЛАЧХ перемещается параллельно оси ординат на величину 20
l
gk
(рис.7а)
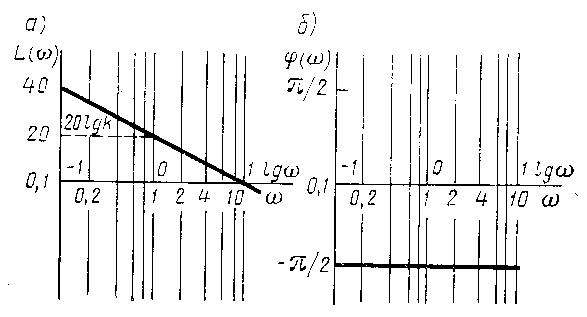
Рисунок 7. Логарифмические частотные характеристики интегрирующего звена.
Логарифмическая фазо-частотная характеристика не зависит от частоты и равна - p / 2 (рис.7б). На рис.7 на оси абсцисс для сравнения указаны значения w
и lg
w
, а также нанесена координатная сетка частот.
Пример1.
Определим динамические свойства гидравлического механизма (рис.8) , который широко применяется в современных системах регулирования. Входной величиной для него является перепад давления p
ВХ
=
p
1
-
p
2
, а выходной – перемещение D
s
ВЫХ
поршня.
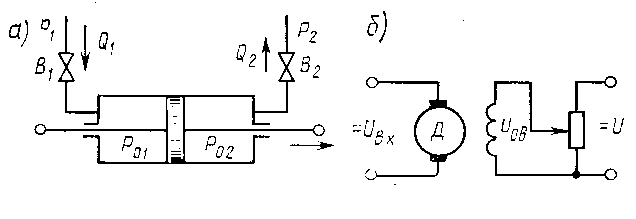
Рисунок 8. Примеры интегрирующих звеньев.
Сила давления на поршень равна p
= (
p
01
-
p
02
)
F
, где F
- эффективная площадь поршня. Если пренебречь трением и инерцией поршня. То можно считать, что это усилие целиком расходуется преодоление внешней нагрузки, приложенной к поршню (сопротивление перемещению регулирующего органа, заслонки, шибера и т.п.):
р
В
.
Н
= (p01
- p02
) F
(10)
При небольших отклонениях от состояния равновесия расходы жидкости через вентили В1
и В2
пропорциональны перепадам давления на вентилях
Q1
=
k1
(p1
- p01
); Q2
= k2
(p02
- p2
) (11)
Так как Q
1
= Q
2
, то решив совместно уравнения (10) и (11), получим
p
01
= [(
F
(
k
1
p
1
+
k
2
p
2
) +
k
2
р
В.Н
)] /
F
(
k
1
+
k
2
) (12)
Поступление жидкости за бесконечно малый отрезок времени в левую полость исполнительного механизма при расходе Q
1
составляет Q
1
dt
. За счёт этого поршень перемещается на величину ds
ВЫХ.
Так как объём поступившей жидкости равен приращению объёма левой полости исполнительного механизма, то Q
1
dt
=
F
ds
ВЫХ
или ds
ВЫХ
/ dt
=
Q
1
/ F
1
.
Подставив в это выражение из (11) значение Q
1
, с учётом (12) получим
ds
ВЫХ
/ dt
= [
k
1
k
2
F
(
p
1
-
p
2
) -
k
1
k
2
f
В.Н
] /
F
2
(
k
1
+
k
2
) (13)
В этом случае, если можно пренебречь величиной внешней нагрузки р
в.н. Уравнение примет вид ds
ВЫХ
/ dt
=
k
D
P
ВХ
, где k
= [
k
1
k
2
/ (
k
1
+
k
2
)] /
F
; D
P
ВХ
=p
1
-
p
2
; k
– коэффициент передачи интегрирующего звена, значение которого можно изменять в широких пределах с помощью вентилей В1
и В2
.
Таким образом дифференциальное уравнение гидравлического исполнительного механизма имеет вид dx
ВЫХ
/ dt
=
k
x
ВХ
; следовательно, в динамическом отношении он является динамическим звеном.
Дифференцирующее звено.
Выходная величина дифференцирующего звена пропорциональна производной по времени от входной величины:
x
ВЫХ
= k
d
хВХ
/
dt
(14)
Передаточная функция
W (p) = kp. (15)
Из выражения хВЫХ
= k
d
хВХ
/
dt
следует, что выходная величина дифференцирующее звена пропорциональна скорости изменения входной величины, Если входная и выходная величина имеют одинаковую размерность, то коэффициент k
выражается в секундах. В этом случае его принято обозначать Т
и называть постоянной времени дифференцирующего звена.
Частотные характеристики идеального дифференцирующего звена с придаточной функцией W (p) = k p
имеют вид
W (i w) = j w k; U (w) = 0;
V (w) = w k; W (w) = k w;
j
(w) =
p
/ 2
(16)
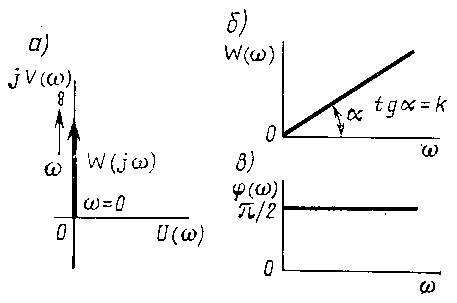
Рисунок 9. Частотная характерика дифференцирующего звена.
В комплексной показательной форме W
(
i
w
) =
w
k
e
j
p
/ 2
. Эти характеристики представлены на рис. 9. Комплексная частотная характеристика дифференцирующего звена совпадает с положительной мнимой полуосью (рис.9а). При всех частотах выходные колебания опережают по фазе входные колебания на угол 90°, т.к. фазочастотная характеристика не зависит от частоты и равна p / 2 (рис.9в).
Амплитудно-частотная характеристика W
(
w
)
имеет вид прямой линии, проходящей через начало координат под углом a
=
arctg
k
.
Чем больше частота входных колебаний, тем больше они усиливаются звеном. При малых частотах (w
= 0
) сигнал через звено не проходит (рис.9б). Скачкообразное единичное изменение входной величины вызывает мгновенное изменение выходной величины от 0 до ¥ и мгновенный спад её от ¥ до 0.
Логарифмируя W
(
w
)
в выражении (16), получаем
L (w) = 20 lg k + 20 lg w (17)

Рисунок 10. Логарифмические частотные характеристики частотного звена.
Логарифмическая амплитудно-частотная характеристика (ЛАЧХ) дифференцирующего звена представляет собой прямую (рис. 10а) с наклоном +20 дБ / дек, ордината, которой при w
= 1
равна 20
lg
k
.
Фазочастотная характеристика звена в полулогарифмическом масштабе в соответствии с (16) представлена на рис.10б.
Примером дифференцирующего звена может служить тахогенератор, если за его входную величину принять угол поворота его вала bВХ
, а за выходную величину – напряжение U
ВЫХ
тахогенератора, т.к. последнее пропорционально угловой скорости wВЫХ
, которая, в свою очередь, равна производной от угла поворота U
ВЫХ
= kВХ
= k
d
b
ВХ
/ dt
.
Реальное интегрирующее звено.
В динамическом отношении реальное интегрирующее звено определяется дифференциальным уравнением
T
d
2
x
ВЫХ
/
dt
2
+
dx
ВЫХ
/ dt
=
k
x
ВХ
(18)
Передаточная функция звена
W
(
p
) =
k
/
p
(
T
p
+ 1)
(19)
Из этого выражения следует, что реальное интегрирующее звено можно рассматривать как последовательное соединение идеального интегрирующего и апериодического звеньев. Коэффициент k
реального интегрирующего звена равен коэффициенту передачи идеального интегрирующего звена.
Постоянная времени Т
определяет инерционность процесса интегрирования. При этом чем меньше Т,
тем больше по своим свойствам реальное интегрирующее звено приближается к идеальному интегрирующему. Примером реального интегрирующего звена может служить электро двигатель, если в динамическом отношении нельзя пренебречь его электромеханической инерцией. В этом случае связь между напряжением двигателя u
ВЫХ
и его углом поворота b
ВЫХ
определяется дифференциальным уравнением
TM
d
2
b
ВЫХ
/
dt
2
+
d
b
ВЫХ
/
dt
=
k
u
ВХ
(20)
где Т
M
– постоянная времени, определяемая инерционностью якоря двигателя и перемещаемых этим двигателем масс; k
– коэффициент передачи двигателя по каналу: подводимое напряжение к двигателю – угловая скорость двигателя.
Из выражения (20) следует, что в рассматриваем случае в динамическом отношении электродвигатель является реальным интегрирующим звеном и его передаточная функция определяется выражением (19).
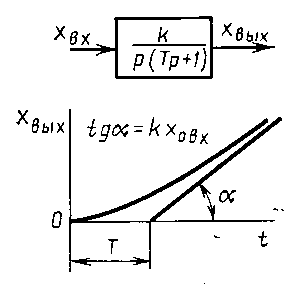
Рисунок 11. Передаточная функция и переходной процесс реального интегрирующего звена.
На рис.11 представлен характер изменения выходной величины x
ВЫХ
реального интегрирующего звена при подаче на вход постоянного сигнала x
0ВХ
Реальное дифференцирующее звено.
Дифференциальное уравнение реальное дифференцирующего звена имеет вид
T
dx
ВЫХ
/
dt
+
x
ВЫХ
=
k
dx
ВХ
/
dt
(21)
С учётом этого передаточная функция звена
W (p) = k p / (T p + 1)
(22)
Таким образом, реальное дифференцирующее звено можно рассматривать как последовательное соединение идеального дифференцирующего звена и апериодического звена. При этом, чем меньше постоянная времени Т
, тем больше реальное дифференцирующее звено приближается к идеальному дифференцирующему.

Рисунок 12. Передаточная функция и переходной процесс реального дифференцирующего звена.
Переходный процесс реального дифференцирующего звена представлен на рис.12. Чем меньше Т
, тем ближе реальное дифференцирующее звено приближается к идеальному. Если Т
стремится к нулю, то получаем идеальное дифференцирующее звено с коэффициентом передачи k
.

Рисунок 13. Схема реального дифференцирующего звена.
Пример.
Определим динамическиесвойства RC-цепи, представленной на рис.13, для которой
u
ВЫХ
= (1 / C)
¦
i dt + i R1
+ u
ВЫХ
; u
ВЫХ
= i R2
.
(23)
Преобразуя эти уравнения по Лапласу, получаем
R
2
C
p
U
ВХ
(
p
) = [1 +
C
(
R
1
+
R
2
)
p
]
U
ВЫХ
(
p
)
(24)
Передаточная функция цепи
W (p) = k Т p / (T p + 1)
(25)
Таким образом, в динамическом отношении RC-цепь (рис.13) является реальным дифференцирующим звеном.
Постоянная времени и коэффициент передачи звенаk
=
R
2
/ (
R
1
+
R
2
);
T
=
C
(
R
1
+
R
2
)
.
Изображение выходной величины при скачкообразном изменении входной величины до х0ВХ
Типы регулярных регуляторов (PID) ПИД.
  Сигнал Сигнал
ОС
Сумматор Упр. Устройство Обр. Связь Орг. Регистр.
Тепловые регуляторы.
Регулятор с пропорциональным законом регулирования называется пропорциональным регулятором или П-регулятором.
В динамическом отношении П-регуляторы являются усилительным звеном.
Переходные процессы в П-регуляторах описываются выражением y = kx; где x – входное воздействие на регулятор равное воздействию регулирующей величины от заданного значения, y – воздействие регулятора на регулирующий орган, направленное на ликвидацию отклонения регулирующей величины от заданного значения.
При настройке П-регулятора следует иметь в виду, что чрезмерное увеличение запаса устойчивости улучшает качество регулирования, так как при этом затягивается переходной в системе. С учётом этого для системы с П-регулятором имеется определённое значение коэффициента его передачи k, который и следует выбрать при настройке системы.
Интегральные регуляторы.
Регуляторы с законом регулирования  называются интегральными или И-регуляторами. называются интегральными или И-регуляторами.
Хотя путём выбора оптимального значения коэффициенты передачи и можно существенно уменьшить, установив ошибку регулирования, её полная, ликвидация в системе с П-регулятором даже теоретически невозможна. Основное назначение законов И-регуляторов – ликвидация установившихся ошибок регулирования. Как самостоятельные регуляторы И-регуляторы применяются редко из-за медленного возрастания регулирующего воздействия на объект при отклонении регулируемой величины.
Дифференциальные регуляторы.
П-регуляторы оказывают на объект существенное регулирующее воздействие, когда регулируемая величина уже имеет значительное отклонение от заданного значения.
И-регуляторы оказывают регулирующее воздействие постоянно наращивая его по интегралу. П- и И-регуляторы не могут упредить ожидаемое отклонение регулируемой величины, а реагируют только на уже имеющиеся в данный момент нарушения технологического процесса. Для упреждения нарушений используют Д-регуляторы, работающие по закону y = kdx / dt.
Пропорциональные регуляторы.
Приближение точки пересечения КЧХ разомкнутой системы отрицательной полуоси к точке В (-1,
j
0)
определяет запас устойчивости по модулю с
замкнутой автоматической системы регулирования. При приближении КЧХ к точке В увеличивается колебательность в замкнутой системе; при пересечении этой точки (запас устойчивости с = 0) в замкнутой системе возникают незатухающие колебания, а при охвате КЧХ точки В (-1,
j
0)
замкнутая система неустойчива. Так как модуль КЧХ системы определяется коэффициентом передачи (усиления) разомкнутой системы на данной частоте, то степень приближения КЧХ разомкнутой системы можно регулировать путём изменения её коэффициента передачи k
.
Комплексная частотная характеристика разомкнутой системы
W
(
j
w
) =
WP
(
j
w
)
W
ОБ
(
j
w
)
(26)
Из этого выражения следует, что коэффициент передачи разомкнутой системы можно изменять с помощью автоматического регулятора, если его комплексная частотная характеристика имеет вид
WC
(j w) = kP
, (27)
Где k
P
-
коэффициент передачи регулятора, являющийся его параметром настройки. При этом КЧХ разомкнутой системы имеет вид
W
(
j
w
) = k
P
W
ОБ
(
j
w
).
(28)
Из этого выражения следует, что при подключении кобъекту такого регулятра КЧХ объекта увеличивается на каждой частоте пропорционально в kp
раз. Поэтому регулятора с таким пропорциональным законом регулирования называют пропорциональными регуляторами или П-регуляторами.
В динамическом отношении П-регуляторы являются усилительным звеном. Передаточная функция П-регулятора
W
П
(р) = k
P
. (29)
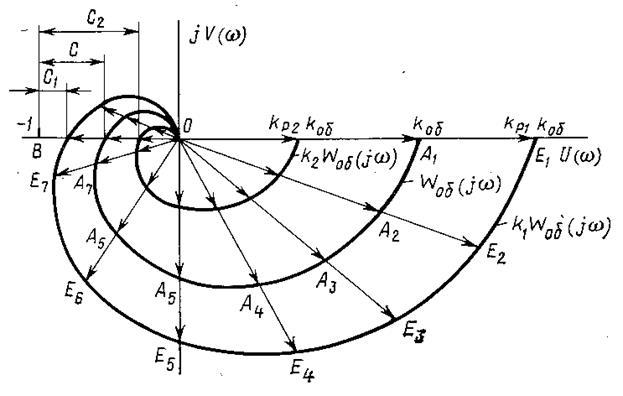
Рисунок 14. Характер изменения КЧХ разомкнутой системы с П-регулятором.
На рис.14 представлены КЧХ разомкнутой системы с П-регулятором. При k
P
= 1 КЧХ разомкнутой системы совпадает с КЧХ объекта регулирования. При k
P
> 1 КЧХ разомкнутой системы приближается к точке В(-1,
j
0)
; при k
P
< 1 отходит от этой точки. В качестве примера на рис.14 изображены две КЧХ разомкнутой системы при k
P
= k
P
1
= 1,5 и k
P
= k
P
2
= 0,5.
В соответствии с W
(
j
w
) = k
P
W
ОБ
(
j
w
)
на рис.14, например, вектор КЧХ разомкнутой системы равен ОЕ2
= k
P
1
* ОА2
= 1,5 ОА2
, где ОА2
- вектор КЧХ объекта.
Закон регулирования П-регулятора является статическим. Переходные процессы П-регулятора описываются отношением
Y = kP
x
(30)
где x
-
входное воздействие на регулятор, равное отклонению Е
регулируемой величины от заданного значения; y-
воздействие регулятора
на регулирующий орган, направленное на ликвидацию отклонения регулируемой величины от заданного значения.
При настройке П-регулятора следует иметь в виду, что чрезмерное увеличение запаса устойчивости с
ухудшает качество регулирования, т.к. при этом затягивается переходной процесс в системе (увеличивается время регулирования), увеличиваются динамическая ошибка регулирования, установившаяся ошибка регулирования как по каналу задающего, так и по каналу возмущающего воздействий.
С учётом этого для системы с П-регулятором имеется определённое оптимальное значение коэффициента его передачи k
p, которое и следует выбирать при настройке системы.
Интегральные регуляторы.
При статистическом объекте и статистическом регуляторе АСР является статистической как по каналу задающего, так и по каналу возмущающего воздействий.
При астатическом объекте система астатическая по каналу задающего воздействия и статическая – по каналу возмущающего воздействия.
Таким образом, АСР П-регулятором всегда имеет установившуюся ошибку регулирования по канал возмущающего воздействия, а при статическом объекте – и по каналу задающего воздействия, Хотя путём выбора оптимального значения коэффициента передачи П-регулятора и можно существенно уменьшить установившуюся ошибку регулирования,её полная ликвидация в системе с П–регулятором даже теоретически невозможна.
Если по условия технологии требуется точное поддержание заданного значения регулируемой величины, то в знаменателе передаточной функции W (р) = W
P
(р) W
ОБ
(р)
разомкнутой системы в качестве сомножителя должен быть оператор р
. С учётом этого передаточная функция разомкнутой системы должна иметь вид W(р) = W
P
(р) W
об (р) = W
ОБ
(р) / р,
т.е. необходимо применение в системе астатического регулятора с законом регулирования, определяемого передаточной функцией W (р) = 1 / р,
или в более общем случае
W (р) = k
P
/ р
(31)
Сравнивая W (р) = k
P
/ р
и W (р) = k
/ р
, видим ,что регулятор с передаточной функцией W (р) = k
P
/ р
в динамическом отношении является интегрирующим звеном. Выходная величина такого регулятора пропорциональна интегралу от входной величины, т.е.
 (32) (32)
Поэтому регуляторы с таким законом регулирования называются интегральными
или сокращённ И-регуляторами.
Коэффициент передачи k
p определяет степень ввода в закон регулирования интеграла и является параметром настройки И-регулятора. В соответствии с L (w) = 20 lg k – 20 lg w
КЧХ И-регулятораимеет вид
W
И
(i w) = k
P
e - j
p
/ 2
/ w
. (33)
КЧХ разомкнутой системы с И-регулятором определяется выражением
W (i w) = k
P
e - j
p
/ 2
W
ОБ
(i w) / w
. (34)
Из этого выражения следует, что в системе с И-регулятором вектор КЧХ объекта на данной частоте увеличивается в k
p/w
раз и поворачивается по часовой стрелке на 90°.
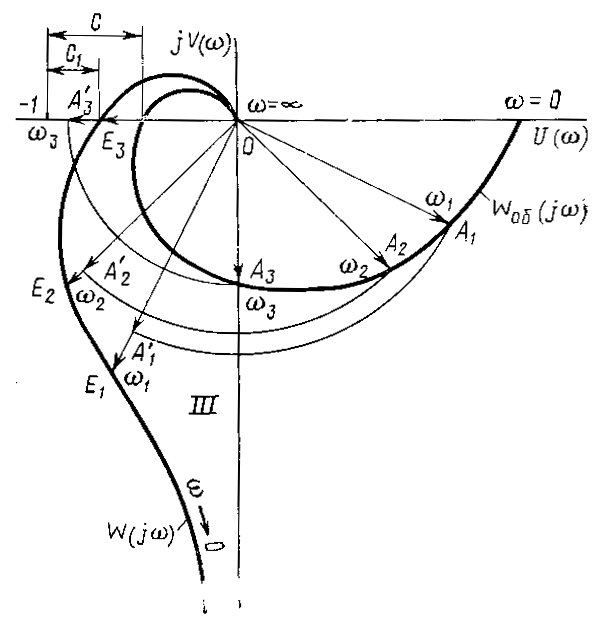
Рисунок 15. Кмплексные частотные характеристики объекта Wоб (jw) и разомкнутой АСП W (jw) с И-регулятором.
На рис.15 выполнено построение КЧХ разомкнутой системы с И-регулятором и известной КЧХ объекта регулирования. Каждый вектор КЧХ разомкнутой системы связан с КЧХ объекта выражением … Например,
Так как при w
®0 отношениеkP
/ w
®¥, то КЧХ разомкнутой системы с И-регулятором при w
®0 уходит в бесконечность, асимптотически приближаясь в квандранте III
к отрицательному направлению мнимой полуоси. Основное назначение закона И-регулирования – ликвидация установившейся ошибки регулирования.
Как самостоятельные регуляторы И-регулиры применяются редко из-за медленного нарастания регулирующего воздействия на объект при отклонении регулируемой величины. В связи с этим И-регулиры в основном применяются для регулирования в комплекте с регуляторами, формирующими другие законы регулирования, например с П-регуляторами.
Обычно закон И-регулирования формируется не самостоятельным регулятором, а блоком или устройством, конструктивно являющимся составной частью регулятора, реализующего более сложный, например пропорционально-интегральный, закон регулирования.
Аналогично W
(
p
) = 1 /
T
p
передаточная функция И-регулятора имеет вид
W
И
(p) = 1 / (T
И
p),
(35)
где T
И
- постоянная времени интегрирования – параметр настройки регулятора.
Рассмотрим физический смысл постоянной времени интегрирования.
Закон И-регулирования И-регулирования с учётом (35) выражается формулой
y = (1 / T
И
)
¦
x dt
(36)
Предположим, что на вход регулятора поступил постоянный сигнал х = х
0ВХ
. При этом выходной сигнал изменяется по закону y
= (1 /
T
И
)
¦
x
0ВХ
dt
= х
0ВХ
t
/
T
И
. По истечении времени t
=
T
и значение выходного сигнала равно у = х
0ВХ
.
Таким образом, постоянная времени интегрирования И-регулятора равна , в течении которого с момента поступления на вход регулятора постоянного сигнала сигнал на выходе регулятора достигает значения. Равного значению входного сигнала.
Дифференциальные регулирующие устройства.
Пропорциональные регуляторы оказывают на объект существенное регулирующее воздействие, когда регулируемая величина уже имеет значительное отклонение от заданного значения. Интегральные регуляторы оказывают регулирующее воздействие, постоянно наращивая его по интегралу.
Таким образом, П- и И-регуляторы не могут упреждать ожидаемые отклонения регулируемой величины, регулируя только на уже имеющиеся в данный момент нарушения технологического процесса. В то же время, если регулируемая величина в какой-то момент времени начинает быстро отклонятся от заданного значения, то это значит, что на объект поступили значительные возмущения и что отклонения регулируемой величины в результате этого воздействия будут значительными.
В этом случае желательно иметь регулятор, который вырабатывал бы регулирующее воздействие пропорционально скорости отклонения регулируемой величины от заданного значения
У = ТД
dx
/
dt
(37)
Такой регулятор при большой скорости отклонения регулируемой величины, когда в начальный момент П-регулятор оказывает слабое регулирующее на объект, а И-регулятор только начинает наращивать регулирующее воздействие, оказывал бы существенное регулирующее воздействие на объект, ликвидируя тем самым ожидаемое отклонение регулируемой величины, причём чем дольше возмущающее воздействие на объект, тем быстрее отклоняется регулируемая величина от задания и тем значительнее регулирующее воздействие регулятора на объект, направленное на нейтрализацию возмущающего воздействия.
С учетом изложенного для автоматического регулирования а практику введены дифференциальные регулирующие устройства, формирующие закон регулирования, пропорциональный скорости отклонения регулируемой величины у=Т
дdx/dt.
Такие регулирующие устройства с законом регулирования у=Т
дdx/dt
дифференцируют поступающий на его вход сигнал (отклонение регулируемой величины) и называются дифференциальными
или Д-регуляторами.
Передаточная функция Д-регулятора
W
Д
(p) = T
Д
p (38)
где T
Д
- постоянная времени дифференцирования – параметр настройки регулятора.
При сравнении у
=
ТД
dx
/
dt
и х
ВЫХ
=k
d
х
ВХ
/
dt
видно, что Д-регулятор в динамическом отношении является дифференцирующим звеном. Д-регулятор у
=
ТД
dx
/
dt
отдельно для регулирования не применяется , т.к. он реагирует только на скорость отклонения регулируемой величины и не реагирует на постоянное значение этого отклонения, сколь елико бы оно ни было. Этот регулятор как блок регулирования конструктивно входит в состав какого-либо комбинированного регулятора, формирующего сложный закон регулирования, например пропорционально-интегрально-дифференциальный.
Вывод.
Курсовой проект был сделан для лучшего усвоения знаний, умений и навыков учащихся.
Он позволяет наглядно продемонстрировать работу динамической программы по теме «Регулярные регуляторы», а также провести контроль и оценку знаний по теоретической части
В совокупности это поможет учащимся лучше понять данную тему, получить теоретические и практические навыки и применить их в дальнейшем на практике.
Курсовой проект может быть применён учащимсмя в дальнейшем, как методическое пособие, по данной теме «Регулярные регуляторы» для лучшего усвоения.
Список литературы.
1. А.С. Клюев., «Автоматическое регулирование», Москва, «Высшая школа», 1986 г.
2. http://www.adastra.ru
3. http://home.uic.tula.ru/~sa241272/Russian/adaptive.html
4. Конспект лекций Рыткого А.В. по автоматическому управлению.
5. Ю.Н. Тюрин и др., «Статистический анализ данных на компьютере», Москва, «ИНФРА-М», 1998 г.
*
Звенос придаточной функцией можно представить в виде последовательно соединённых усилительного звена с передаточной функцией W
(
p
) =
k
и собственно интегрирующего звена. Однако т.к. усилительное звено изменяет только масштаб выходной величины, то для уменьшения числа звеньев при представлении АСР элементарными динамическими звеньями звено с передаточной функцией принимается за элементарное.
|


